
| ||||||||||||||||||||||||||||||||||||||||||||||||||||
|
USENIX '05 Paper
[USENIX '05 Technical Program]
Building a Reactive Immune System for Software ServicesNetwork Security Lab Department of Computer Science, Columbia University
Abstract:
We propose a reactive approach for handling a wide variety of
software failures, ranging from remotely exploitable vulnerabilities
to more mundane bugs that cause abnormal program termination (e.g., illegal memory dereference) or other recognizable bad behavior
(e.g., computational denial of service). Our emphasis is in
creating ``self-healing'' software that can protect itself against a
recurring fault until a more comprehensive fix is applied.
Briefly, our system monitors an application during its execution using a variety of external software probes, trying to localize (in terms of code regions) observed faults. In future runs of the application, the ``faulty'' region of code will be executed by an instruction-level emulator. The emulator will check for recurrences of previously seen faults before each instruction is executed. When a fault is detected, we recover program execution to a safe control flow. Using the emulator for small pieces of code, as directed by the observed failure, allows us to minimize the performance impact on the immunized application. We discuss the overall system architecture and a prototype implementation for the x86 platform. We show the effectiveness of our approach against a range of attacks and other software failures in real applications such as Apache, sshd, and Bind. Our preliminary performance evaluation shows that although full emulation can be prohibitively expensive, selective emulation can incur as little as 30% performance overhead relative to an uninstrumented (but failure-prone) instance of Apache. Although this overhead is significant, we believe our work is a promising first step in developing self-healing software.
|
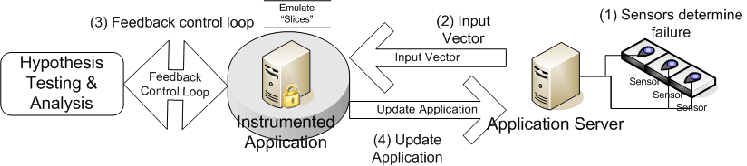 |
Our architecture, depicted in Figure 1, uses three types of components: a set of sensors that monitor an application (such as a web server) for faults; Selective Transactional EMulation (STEM), an instruction-level emulator that can selectively emulate ``slices'' (arbitrary segments) of code; and a testing environment where hypotheses about the effect of various fixes are evaluated. These components can operate without human supervision to minimize reaction time.
When the sensor detects an error in the application's execution (such as a segmentation fault), the system instruments the portion of the application's code that immediately surrounds the faulty instruction(s), such that the code segment is emulated (the mechanics of this are explained in Section 3). To verify the effectiveness of the fix, the application is restarted in a test environment with the instrumentation enabled, and is supplied with the input that caused the failure (or the N most recent inputs, if the offending one cannot be easily identified, where N is a configurable parameter). We focus on server type applications that have a transactional processing model, because it is easier to quickly correlate perceived failures with a small or finite set of inputs than with other types of applications (e.g., those with a GUI).
During emulation, STEM maintains a record of all memory changes (including global variables or library-internal state, e.g., libc standard I/O structures) that the emulated code makes, along with their original values. Furthermore, STEM examines the operands for each machine instruction and pre-determines the side effects of the instructions it emulates. The use of an emulator allows us to circumvent the complexity of code analysis, as we only need to focus on the operation and side effects of individual instructions independently from each other.
If the emulator determines that a fault is about to occur, the emulated execution is aborted. Specifically, all memory changes made by the emulated code are undone, and the currently executing function is ``forced'' to return an error. We describe how both emulation and error virtualization are accomplished in Sections 2.3 and 2.4, respectively, and we experimentally validate the error virtualization hypothesis in Section 4. For our initial approach, we are primarily concerned with failures where there is a one-to-one correspondence between inputs and failures, and not with those that are caused by a combination of inputs. Note, however, that many of the latter type of failures are in fact addressed by our system, because the last input (and code leading to a failure) will be recognized as ``problematic'' and handled as we have discussed.
In the testing and error localization phase, emulation stops after forcing the function to return. If the program crashes, the scope of the emulation is expanded to include the parent (calling) routine and the application re-executes with the same inputs. This process is repeated until the application does not terminate after we abort a function calls sequence. In the extreme case, the whole application could end up being emulated, at a significant performance cost. However, Section 4 shows that this failsafe measure is rarely necessary.
If the program does not crash after the forced return, we have found a ``vaccine'' for the fault, which we can use on the production server. Naturally, if the fault is not triggered during an emulated execution, emulation halts at the end of the vulnerable code segment, and all memory changes become permanent.
The overhead of emulation is incurred at all times (whether the fault is triggered or not). To minimize this cost, we must identify the smallest piece of code that we need emulate in order to catch and recover from the fault. We currently treat functions as discrete entities and emulate the whole body of a function, even though the emulator allows us to start and stop emulation at arbitrary points, as described in Section 3. Future work will explore strategies for minimizing the scope of the emulation and balancing the tradeoff between coverage and performance.
In the remainder of this section, we describe the types of sensors we employ, give an overview of how the emulator operates (with more details on the implementation in Section 3), and describe how the emulator forces a function to return with an error code. We also discuss the limitations of reactive approaches in general and our system in particular.
The selection of appropriate failure-detection sensors depends on both the nature of the flaws themselves and tolerance of their impact on system performance. We describe the two types of application monitors that we have experimented with.
The first approach is straightforward. The operating system forces a misbehaving application to abort and creates a core dump file that includes the type of failure and the stack trace when that failure occurred. This information is sufficient for our system to apply selective emulation, starting with the top-most function in the stack trace. Thus, we only need a watchdog process that waits until the service terminates before it invokes our system.
A second approach is to use an appropriately instrumented version of the application on a separate server as a honeypot, as we demonstrated for the case of network worms [29]. Under this scheme, we instrument the parts of the application that may be vulnerable to a particular class of attack (in this case, remotely exploitable buffer overflows) such that an attempt to exploit a new vulnerability exposes the attack vector and all pertinent information (attacked buffer, vulnerable function, stack trace, etc.).
This information is then used to construct an emulator-based vaccine that effectively implements array bounds checking at the machine-instruction level. This approach has great potential in catching new vulnerabilities that are being indiscriminately attempted at high volume, as may be the case with an ``auto-root'' kit or a fast-spreading worm. Since the honeypot is not in the production server's critical path, its performance is not a primary concern (assuming that attacks are relatively rare phenomena). In the extreme case, we can construct a honeypot using our instruction-level emulator to execute the whole application, although we do not further explore this possibility in this paper.
The recovery mechanism uses an instruction-level emulator, STEM, that can be selectively invoked for arbitrary segments of code. This tool permits the execution of emulated and non-emulated code inside the same process. The emulator is implemented as a library that defines special tags (a combination of macros and function calls) that mark the beginning and the end of selective emulation. To use the emulator, we can either link it with an application in advance, or compile it in the code in response to a detected failure, as was done in [29].
Upon entering the vulnerable section of code, the emulator snapshots the program state and executes all instructions on the virtual processor. When the program counter references the first instruction outside the bounds of emulation, the virtual processor copies its internal state back to the real CPU, and lets the program continue execution natively. While registers are explicitly updated, memory updates have implicitly been applied throughout the execution of the emulation. The program, unaware of the instructions executed by the emulator, continues executing directly on the CPU.
To implement fault catching, the emulator simply checks the operands of instructions it is emulating, taking into consideration additional information supplied by the sensor that detected the fault. For example, in the case of division by zero, the emulator need only check the value of the appropriate operand to the div instruction. For illegal memory dereferencing, the emulator verifies whether the source or destination addresses of any memory access (or the program counter, for instruction fetches) point to a page that is mapped to the process address space using the mincore() system call. Buffer overflow detection is handled by padding the memory surrounding the vulnerable buffer, as identified by the sensor, by one byte, similar to the way StackGuard [13] operates. The emulator then simply watches for memory writes to these memory locations. This approach requires source code availability, so as to insert the ``canary'' variables. Contrary to StackGuard, our approach allows us to stop the overflow before it overwrites the rest of the stack, and thus to recover the execution. For algorithmic-complexity denial of service attacks, such as the one described in [9], we keep track of the amount of time (in terms of number of instructions) we execute in the instrumented code; if this exceeds a pre-defined threshold, we abort the execution. This threshold may be defined manually, or can be determined by profiling the application under real (or realistic) workloads, although we have not fully explored the possibilities.
We currently assume that the emulator is pre-linked with the vulnerable application, or that the source code of that application is available. It is possible to circumvent this limitation by using the CPU's programmable breakpoint register (in much the same way that a debugger uses it to capture execution at particular points in the program) to invoke the emulator without the running process even being able to detect that it is now running under an emulator.
Upon detecting a fault, our recovery mechanism undoes all memory changes and forces an error return from the currently executing function. To determine the appropriate error return value, we analyze the declared type of the function.
Depending on the return type of the emulated function, the system returns an ``appropriate'' value. This value is determined based on some straightforward heuristics and is placed in the stack frame of the returning function. The emulator then transfers control back to the calling function. For example, if the return type is an int, a value of -1 is returned; if the value is unsigned int the system returns 0, etc. A special case is used when the function returns a pointer. Instead of blindly returning a NULL, we examine if the returned pointer is further dereferenced by the parent function. If so, we expand the scope of the emulation to include the parent function. We handle value-return function arguments similarly. There are some contexts where this heuristic may not work well; however, as a first approach these heuristics worked extremely well in our experiments (see Section 4).
In the future, we plan to use more aggressive source code analysis techniques to determine the return values that are appropriate for a function. Since in many cases a common error-code convention is used in large applications or modules, it may be possible to ask the programmer to provide a short description of this convention as input to our system either through code annotations or as separate input. A similar approach can be used to mark functions that must be fail-safe and should return a specific value when an error return is forced, e.g., code that checks user permissions.
While promising, reactive approaches to software faults face a new set of challenges. As this is a relatively unexplored field, some problems are beyond the scope of this paper.
First, our primary goal is to evolve an application protected by STEM towards a state that is highly resistant to exploits and errors. While we expect the downtime for such a system to be reduced, we do not reasonably expect zero downtime. STEM fundamentally relies on the application monitors detecting an error or attack, stopping the application, marking the affected sections for emulated execution, and then restarting the application. This process necessarily involves downtime, but is incurred only once for each detected vulnerability. We believe that combining our approach with microrebooting techniques can streamline this process.
A reaction system must evaluate and choose a response from a wide array of choices. Currently, when encountering a fault, a system can (a) crash, (b) crash and be restarted by a monitor [7], (c) return arbitrary values [26], or (d) slice off the functionality. Most proactive systems take the first approach. We elect to take the last approach. As Section 2.4 shows, this choice seems to work extremely well. This phenomenon also appears at the machine instruction level [33].
However, there is a fundamental problem in choosing a particular response. Since the high-level behavior of any system cannot be algorithmically determined, the system must be careful to avoid cases where the response would take execution down a semantically (from the viewpoint of the programmer's intent) incorrect path. An example of this type of problem is skipping a check in sshd which would allow an otherwise unauthenticated user to gain access to the system. The exploration of ways to bound these types of errors is an open area of research. Our initial approach is to rely on the programmer to provide annotations as to which parts of the code should not be circumvented.
There is a key tradeoff between code coverage (and thus confidence in the level of security the system provides) and performance (processing and memory overhead). Our emulator implementation is a proof of concept; many enhancements are possible to increase performance in a production system. Our main goal is to emphasize the service that such an emulator will provide: the ability to selectively incur the cost of emulation for vulnerable program code only. Our system is directed to these vulnerable sections by runtime sensors - the quality of the application monitors dictates the quality of the code coverage.
Since our emulator is designed to operate at the user level, it hands control to the operating system during system calls. If a fault were to occur in the operating system, our system would not be able to react to it. In a related problem, I/O beyond the machine presents a problem for a rollback strategy. This problem can partially be addressed by the approach taken in [17], by having the application monitors log outgoing data and implementing a callback mechanism for the receiving process.
Finally, in our current work, we assume that the source code of the vulnerable application is available to our system. We briefly discussed how to partially circumvent this limitation in Section 2.3. Additional work is needed to enable our system to work in a binary-only environment.
We implemented the STEM x86 emulator to validate the practicality of providing a supervision framework for the feedback control loop through selective emulation of code slices. Integrating STEM into an existing application is straightforward. As shown in Figure 2, four special tags are wrapped around the segment of code that will be emulated.
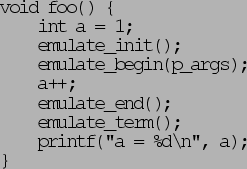 |
The C macro emulate_init() moves the program state (general, segment, eflags, and FPU registers) into an emulator-accessible global data structure to capture state immediately before STEM takes control. The data structure is used to initialize the virtual registers. With the preliminary setup completed, emulate_begin() only needs to obtain the memory location of the first instruction following the call to itself. The instruction address is the same as the return address and can be found in the activation record of emulate_begin(), four bytes above its base stack pointer.
The fetch/decode/execute/retire cycle of instructions continues until either emulate_end() is reached, or when the emulator detects that control is returning to the parent function. If the emulator does not encounter an error during its execution, the emulator's instruction pointer references the emulate_term() macro at completion. To enable the program to continue execution at this address, the return address of the emulate_begin activation record is replaced with the current value of the instruction pointer. By executing emulate_term(), the emulator's environment is copied to the program registers and execution continues under normal conditions.
If an exception occurs during emulation, STEM locates emulate_end() and terminates. Because the emulator saved the state of the program before starting, it can effectively return the program state to its original setting, thus nullifying the effect of the instructions processed through emulation. Essentially, the emulated code is sliced off. At this point, the execution of the code (and its side effects in terms of changes to memory) has been rolled back.
The emulator is designed to execute in user-mode, so system calls cannot be computed directly without kernel-level permissions. Therefore, when the emulator decodes an interruption with an immediate value of , it must release control to the kernel. However, before the kernel can successfully execute the system call, the program state needs to reflect the virtual registers arrived at by STEM. Thus, the emulator backs up the real registers and replaces them with its own values. An INT is issued by STEM, and the kernel processes the system call. Once control returns to the user-level code, the emulator updates its registers and restores the original values in the program's registers.
Our description of the system raises several questions that need to be answered in order to determine the tradeoffs between effectiveness, practicality, and performance.
In the rest of this section, we provide some preliminary experimental evidence that our system offers a reasonable and adjustable tradeoff between the three parameters mentioned above. Naturally, it is impossible to completely cover the space of reactive mechanisms (even within the more limited context of our specific work). Future work is needed to analyze the semantics of error virtualization and the impact that STEM has on the security properties of STEM-enabled applications. As noted below, we plan to construct a correctness testing framework. However, we believe that our results show that such an approach can work and that additional work is needed to fully explore its capabilities and limitations.
To validate our error virtualization hypothesis using forced function return, introduced in Section 2.4, we experimentally evaluate its effects on program execution on the Apache httpd, OpenSSH sshd, and Bind. We run profiled versions of the selected applications against a set of test suites and examine the subsequent call-graphs generated by these tests with gprof and Valgrind [21].
The ensuing call trees are analyzed in order to extract leaf functions. The leaf functions are, in turn, employed as potentially vulnerable functions. Armed with the information provided by the call-graphs, we run a script that inserts an early return in all the leaf functions (as described in Section 2.4), simulating an aborted function. Note that these tests do not require going back up the call stack.
In Apache's case, we examined 154 leaf functions. For each aborted function, we monitor the program execution of Apache by running httperf [20], a web server performance measurement tool. Success for each test was defined as the application not crashing.
The results from these tests were very encouraging, as 139 of the 154 functions completed the httperf tests successfully. In these cases, program execution was not interrupted. What we found to be surprising was that not only did the program not crash, but in some cases all the pages were served (as reported by httperf). This result is probably because a large number of the functions are used for statistical and logging purposes. Furthermore, out of the 15 functions that produced segmentation faults, 4 did so at start up (and would thus not be relevant in the case of a long-running process). While this result is encouraging, testing the correctness of this process would require a regression test suite against the page contents, headers, and HTTP status code for the response. We plan to build this ``correctness'' testing framework.
Similarly for sshd, we iterate through each aborted function while examining program execution during an scp transfer. In the case of sshd, we examined 81 leaf functions. Again, the results were auspicious: 72 of the 81 functions maintained program execution. Furthermore, only 4 functions caused segmentation faults; the rest simply did not allow the program to start.
For Bind, we examined the program execution of named during the execution of a set of queries; 67 leaf functions were tested. In this case, 59 of the 67 functions maintained the proper execution state. Similar to sshd, only 4 functions caused segmentation faults.
These results, along with supporting evidence from [26] and [33], validate our ``error virtualization'' hypothesis and approach. However, additional work is needed to determine the degree to which other types of applications (e.g., GUI-driven) exhibit the same behavior.
Given the success of our experimental evaluation on program execution, we wanted to further validate our hypothesis against a set of real exploits for Apache, OpenSSH sshd, and Bind. No prior knowledge was encoded in our system with respect to the vulnerabilities: for all purposes, this experiment was a zero-day attack.
For Apache, we used the apache-scalp exploit that takes advantage of a buffer overflow vulnerability based on the incorrect calculation of the required buffer sizes for chunked encoding requests. We applied selective emulation on the offending function and successfully recovered from the attack; the server successfully served subsequent requests.
The attack used for OpenSSH was the RSAREF2 exploit for SSH-1.2.27. This exploit relies on unchecked offsets that result in a buffer overflow vulnerability. Again, we were able to gracefully recover from the attack and the sshd server continued normal operation.
Bind is susceptible to a number of known exploits; for the purposes of this experiment, we tested our approach against the TSIG bug on ISC Bind 8.2.2-x. In the same motif as the previous attacks, this exploit takes advantage of a buffer overflow vulnerability. As before, we were able to safely recover program execution while maintaining service availability.
We next turned our attention to the performance impact of our system. In particular, we measured the overhead imposed by the emulator component. STEM is meant to be a lightweight mechanism for executing selected portions of an application's code. We can select these code slices according to a number of strategies, as we discussed in Section 2.2.
We evaluated the performance impact of STEM by instrumenting the Apache 2.0.49 web server and OpenSSH sshd, as well as performing micro-benchmarks on various shell utilities such as ls, cat, and cp.
The machine we chose to host Apache was a single Pentium III at 1GHz with 512MB of memory running RedHat Linux with kernel 2.4.20. The machine was under a light load during testing (standard set of background applications and an X11 server). The client machine was a dual Pentium II at 350 MHz with 256MB of memory running RedHat Linux 8.0 with kernel 2.4.18smp. The client machine was running a light load (X11 server, sshd, background applications) in addition to the test tool. Both emulated and non-emulated versions of Apache were compiled with the -enable-static-support configuration option. Finally, the standard runtime configuration for Apache 2.0.49 was used; the only change we made was to enable the server-status module (which is compiled in by default but not enabled in the default configuration). STEM was compiled with the ``-g -static -fno-defer-pop'' flags. In order to simplify our debugging efforts, we did not include optimization.
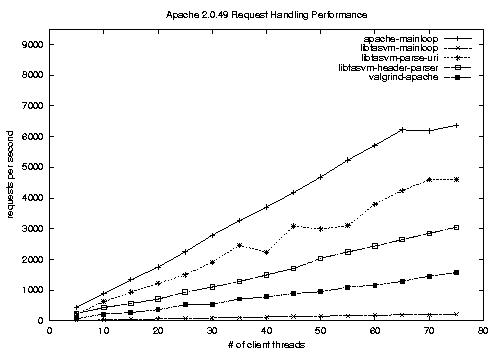
We chose the Apache flood httpd testing tool to evaluate how quickly both the non-emulated and emulated versions of Apache would respond and process requests. In our experiments, we chose to measure performance by the total number of requests processed, as reflected in Figures 3 and 4. The value for total number of requests per second is extrapolated (by flood's reporting tool) from a smaller number of requests sent and processed within a smaller time slice; the value should not be interpreted to mean that our test Apache instances and our test hardware actually served some 6000 requests per second.
To get a sense of the performance degradation imposed by running the entire system inside an emulator other than STEM, we tested Apache running in Valgrind version 2.0.0 on the Linux test machine that hosted Apache for our STEM test trials.
Valgrind has two notable features that improve performance over our full emulation of the main request loop. First, Valgrind maintains a 14 MB cache of translated instructions which are executed natively after the first time they are emulated, while STEM always translates each encountered instruction. Second, Valgrind performs some internal optimizations to avoid redundant load, store, and register-to-register move operations.
We ran Apache under Valgrind with the default skin Memcheck and tracing all children processes. While Valgrind performed better than our emulation of the full request processing loop, it did not perform as well as our emulated slices, as shown in Figure 3 and the timing performance in Table 1.
|
Finally, the Valgrind-ized version of Apache is 10 times the size of the regular Apache image, while Apache with STEM is not noticeably larger.
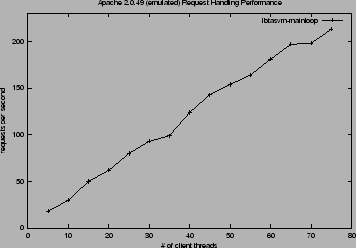
We demonstrate that emulating the bulk of an application entails a significant performance impact. In particular, we emulated the main request processing loop for Apache (contained in ap_process_http_connection()) and compared our results against a non-emulated Apache instance. In this experiment, the emulator executed roughly 213,000 instructions. The impact on performance is clearly seen in Figure 3 and further elucidated in Figure 4, which plots the performance of the fully emulated request-handling procedure.
 |
In order to get a more complete sense of this performance impact, we timed the execution of the request handling procedure for both the non-emulated and fully-emulated versions of Apache by embedding calls to gettimeofday() where the emulation functions were (or would be) invoked.
For our test machines and sample loads, Apache normally (e.g., non-emulated) spent 6.3 milliseconds to perform the work in the ap_process_http_connection() function, as shown in Table 1. The fully instrumented loop running in the emulator spends an average of 278 milliseconds per request in that particular code section. For comparison, we also timed Valgrind's execution of this section of code; after a large initial cost (to perform the initial translation and fill the internal instruction cache) Valgrind executes the section with a 34 millisecond average. These initial costs sometimes exceeded one or two seconds; we ignore them in our data and measure Valgrind only after it has stabilized.
In order to identify possible vulnerable sections of code in Apache 2.0.49, we used the RATS tool. The tool identified roughly 270 candidate lines of code, the majority of which contained fixed size local buffers. We then correlated the entries on the list with code that was in the primary execution path of the request processing loop. The two functions that are measured perform work on input that is under client control, and are thus likely candidates for attack vectors.
The main request handling logic in Apache 2.0.49 begins in the ap_process_http_connection() function. The effective work of this function is carried out by two subroutines: ap_read_request() and ap_process_request(). The ap_process_request() function is where Apache spends most of its time during the handling of a particular request. In contrast, the ap_read_request() function accounts for a smaller fraction of the request handling work. We chose to emulate subroutines of each function in order to assess the impact of selective emulation.
We constructed a partial call tree and chose the ap_parse_uri() function (invoked via read_request_line() in ap_read_request()) and the ap_run_header_parser() function (invoked via ap_process_request_internal() in ap_process_request()). The emulator processed approximately 358 and 3229 instructions, respectively, for these two functions. In each case, the performance impact, as expected, was much less than the overhead incurred by needlessly emulating the entire work of the request processing loop.
Using the client machine from the Apache performance tests, we ran a number of micro-benchmarks to gain a broader view of the performance impact of STEM. We selected some common shell utilities and measured their performance for large workloads running both with and without STEM.
For example, we issued an 'ls -R' command on the root of the Apache source code with both stderr and stdout redirected to /dev/null in order to reduce the effects of screen I/O. We then used cat and cp on a large file (also with any screen output redirected to /dev/null). Table 2 shows the result of these measurements.
|
As expected, there is a large impact on performance when emulating the majority of an application. Our experiments demonstrate that only emulating potentially vulnerable sections of code offers a significant advantage over emulation of the entire system.
Modeling executing software as a transaction that can be aborted has been examined in the context of language-based runtime systems (namely, Java) in [28,27]. That work, focused on safely terminating misbehaving threads, introduces the concept of ``soft termination.'' Soft termination allows thread termination while preserving the stability of the language runtime, without imposing unreasonable performance overheads. In that approach, threads (or codelets) are each executed in self-encompassing transactions, applying standard ACID semantics. This allows changes to the runtime's (and other threads') state made by the terminated codelet to be rolled back. The performance overhead of that system can range from 200% up to 2300%. Relative to that work, our contribution is twofold. First, we apply the transactional model to an unsafe language such as , addressing several (but not all) challenges presented by that environment. Second, by selectively emulating, we substantially reduce the performance overhead of the application. However, there is no free lunch: this reduction comes at the cost of allowing failures to occur. Our system aims to automatically evolve a piece of code such that it eventually (i.e., once an attack has been observed, possibly more than once) does not succumb to attacks.
Oplinger and Lam propose [23] another transactional approach to improve software reliability. Their key idea is to employ thread level speculation (TLS) and execute an application's monitoring code in parallel with the primary computation. The computation ``transaction'' is rolled back depending on the results of the monitoring code.
Virtual machine emulation of operating systems or processor architectures to provide a sandboxed environment is an active area of research. Virtual machine monitors (VMM) are employed in a number of security-related contexts, from autonomic patching of vulnerabilities [29] to intrusion detection [14].
Other protection mechanisms include compiler techniques like StackGuard [13] and safer libraries, such as libsafe and libverify [4]. Other tools exist to verify and supervise code during development or debugging. Of these tools, Purify and Valgrind [21] are popular choices.
Valgrind is a program supervision framework that enables in-depth instrumentation and analysis of IA-32 binaries without recompilation. Valgrind has been used by Barrantes et al. [5] to implement instruction set randomization techniques to protect programs against code insertion attacks. Other work on instruction-set randomization includes [16], which employs the i386 emulator Bochs.
Program shepherding [19] is a technique developed by Kiriansky, Bruening, and Amarasinghe. The authors describe a system based on the RIO [11] architecture for protecting and validating control flows according to some security policy without modification of IA-32 binaries for Linux and Windows. The system works by validating branch instructions and storing the decision in a cache, thus incurring little overhead.
The work by Dunlap, King, Cinar, Basrai, and Chen [12] is closely related to the work presented in this paper. ReVirt is a system implemented in a VMM that logs detailed execution information. This detailed execution trace includes non-deterministic events such as timer interrupt information and user input. Because ReVirt is implemented in a VMM, it is more resistant to attack or subversion. However, ReVirt's primary use is as a forensic tool to replay the events of an attack, while the goal of STEM is to provide a lightweight and minimally intrusive mechanism for protecting code against malicious input at runtime.
King, Dunlap, and Chen [18] discuss optimizations that reduce the performance penalties involved in using VMMs. There are three basic optimizations: reduce the number of context switches by moving the VMM into the kernel, reduce the number of page faults by allowing each VMM process greater freedom in allocating and maintaining address space, and ameliorate the penalty for switching between guest kernel mode and guest user mode by simply changing the bounds on the guest memory area rather than re-mapping.
An interesting application of ReVirt [12] is BackTracker [17], a tool that can automatically identify the steps involved in an intrusion. Because detailed execution information is logged, a dependency graph can be constructed backward from the detection point to provide forensic information about an attack.
Toth and Kruegel [32] propose to detect buffer overflow payloads (including previously unseen ones) by treating inputs received over the network as code fragments. They show that legitimate requests will appear to contain relatively short sequences of valid x86 instruction opcodes, compared to attacks that will contain long sequences. They integrate this mechanism into the Apache web server, resulting in a small performance degradation.
Some interesting work has been done to deal with memory errors at runtime. For example, Rinard et al. [25] have developed a compiler that inserts code to deal with writes to unallocated memory by automatically expanding the target buffer. Such a capability aims toward the same goal our system does: provide a more robust fault response rather than simply crashing. The technique presented in [25] is modified in [26] and introduced as failure-oblivious computing. This behavior of this technique is close to the behavior of our system.
One of the most critical concerns with recovering from software faults and vulnerability exploits is ensuring the consistency and correctness of program data and state. An important contribution in this area is presented by Dempsky [10], which discusses mechanisms for detecting corrupted data structures and fixing them to match some pre-specified constraints. While the precision of the fixes with respect to the semantics of the program is not guaranteed, their test cases continued to operate when faults were randomly injected.
Suh et al. [31] propose a hardware based solution that can be used to thwart control-transfer attacks and restrict executable instructions by monitoring ``tainted'' input data. In order to identify ``tainted'' data, they rely on the operating system. If the processor detects the use of this tainted data as a jump address or an executed instruction, it raises an exception that can be handled by the operating system. The authors do not address the issue of recovering program execution and suggest the immediate termination of the offending process. DIRA [30] is a technique for automatic detection, identification and repair of control-hijaking attacks. This solution is implemented as a GCC compiler extension that transforms a program's source code and adds heavy instrumentation so that the resulting program can perform these tasks. The use of checkpoints throughout the program ensures that corruption of state can be detected if control sensitive data structures are overwritten. Unfortunately, the performance implications of the system make it unusable as a front line defense mechanism. Song and Newsome [22] propose dynamic taint analysis for automatic detection of overwrite attacks. Tainted data is monitored throughout the program execution and modified buffers with tainted information will result in protection faults. Once an attack has been identified, signatures are generated using automatic semantic analysis. The technique is implemented as an extension to Valgrind and does not require any modifications to the program's source code but suffers from severe performance degradation.
While our prototype x86 emulator is a fairly straightforward implementation, it can gain further performance benefits by using Valgrind's technique of caching already translated instructions. With some further optimizations, STEM is a viable and practical approach to protecting code. In fact, [6] outlines several ways to optimize emulators; their approaches reduce the performance overhead (as measured by two SPEC2000 benchmarks, crafty and vpr) from a factor of 300 to about 1.7. Their optimizations include caching basic blocks (essentially what VG is doing), linking direct and indirect branches, and building traces.
Software errors and the concomitant potential for exploitable vulnerabilities remain a pervasive problem. Accepted approaches to this problem are almost always proactive, but it seems unlikely that such strategies will result in error-free code. In the absence of such guarantees, reactive techniques for error toleration and recovery can be powerful tools.
We have described a lightweight mechanism for supervising the execution of an application that has already exhibited a fault and preventing its recurrence. Our work aims to ultimately create a ``self-healing'' system. We use selective emulation of the code immediately surrounding a detected fault to validate the operands to machine instructions, as appropriate for the type of fault; we currently handle buffer overflows, illegal memory dereferences, divide-by-zero exceptions, and some types of algorithmic-complexity denial of service attacks. Once a fault has been detected, we restore control to a safe flow by forcing the function containing the fault to return an error value and rolling back any memory modifications the emulated code has made during its execution.
Our intuition is that most applications are written well enough to catch the majority of errors, but fail to consider some boundary conditions that allow the fault to manifest itself. By catching these extreme cases and returning an error, we make use of the already existing error-handling code. We validate this hypothesis using a set of real attacks, as well as randomly induced faults in some widely used open-source servers (Apache, sshd, and Bind). Our results show that our system works in over 88% of all cases, allowing the application to continue execution and behave correctly. Furthermore, by using selective emulation of small code segments, we minimize the performance impact on production servers.
Our approach is a first exploration into a reactive system that allows quick, automated reaction to software failures, thereby increasing service availability in the presence of general software bugs. We re-emphasize that our approach can be used to catch a variety of software failures, not just malicious attacks. Our plans for future work include enhancing the performance of our prototype emulator and further validating our ``error virtualization'' hypothesis by extending the number of applications and attacks examined.
This document was generated using the LaTeX2HTML translator Version 2002-2-1 (1.70)
Copyright © 1993, 1994, 1995, 1996,
Nikos Drakos,
Computer Based Learning Unit, University of Leeds.
Copyright © 1997, 1998, 1999,
Ross Moore,
Mathematics Department, Macquarie University, Sydney.
The command line arguments were:
latex2html -split 0 -show_section_numbers -local_icons main.tex
The translation was initiated by Michael E. Locasto on 2005-02-15
|
This paper was originally published in the
Proceedings of the 2005 USENIX Annual Technical Conference,
April 10–15, 2005, Anaheim, CA, USA Last changed: 2 Mar. 2005 aw |
|