|
JVM '02 Paper
[JVM '02 Tech Program Index]
| Pp. 105–118 of the Proceedings |  |
Stress-testing Control Structures for Dynamic Dispatch in Java
Olivier Zendra
INRIA Lorraine - LORIA / McGill University
Rue du Jardin Botanique, BP 101
Villers-Les-Nancy Cedex, France
https://www.loria.fr/~zendra
zendra@loria.fr
Karel Driesen
McGill University
School of Computer Science - ACL Group
Montreal, Quebec, Canada H3A 2A7
https://www.cs.mcgill.ca/~karel
karel@cs.mcgill.ca
Abstract:
Dynamic dispatch, or late binding of function calls, is a salient
feature of object-oriented programming languages like C++ and Java.
It can be costly on deeply pipelined processors,
because dynamic calls translate to hard-to-predict indirect
branch instructions, which are prone to causing pipeline bubbles.
Several alternative implementation techniques have been designed in
the past in order to perform dynamic dispatch without
relying on these expensive branch instructions.
Unfortunately it is difficult to compare the performance of these
competing techniques, and the issue of which technique is best under
what conditions still has no clear answer.
In this study we aim to answer this question, by measuring the
performance of four alternative
control structures for dynamic dispatch on several
execution environments, under a variety of precisely controlled
execution conditions.
We stress test these control structures using micro-benchmarks,
emphasizing their strenghts and weaknesses, in order to determine the
precise execution circumstances under which a particular technique
performs best.
Keywords: Java, dynamic dispatch, control structure, optimization,
JVM, binary tree dispatch, virtual function call
1 Introduction
Object-oriented message dispatch is a language concept that enables
data (objects) to provide a functionality (message) by
relying on a type-specific implementation, or method.
At run time, the object that receives a message, or virtual method call,
retrieves the corresponding class-specific method and invokes it.
This late binding of dispatch targets allows any object
to play the role of the receiver object, as long as the new object
implements the expected interface (is substitutable à la
Liskov [Lis88]).
Such type-substitutability enables better code abstraction and higher
code re-use, and is therefore one of the main advantages of
object-oriented languages.
As a consequence, dynamic dispatch occurs frequently in
object-oriented programs.
For instance, virtual method invocations in Java [GJSB00]
occur every 12 to 40 byte codes [DLM+00] in SPEC JVM98.
Such late-bound calls are typically expensive on modern deeply
pipelined processors, because they
translate to hard-to-predict indirect branch instructions
that are a cause for long pipeline bubbles [DHV95].
It is nonetheless exceedingly difficult to precisely measure the time
spent on dynamic dispatch itself by real object-oriented programs.
Indeed, virtual function calls occur frequently, which makes it
difficult to isolate dispatch time from the runtime of regular code.
Furthermore, call frequency and amount of runtime polymorphism
strongly depend on coding style as well as runtime parameters.
Finally, on modern superscalar processors, call code sequences can be
co-scheduled with regular code, which further blurs the picture.
Dispatch overhead therefore depends
not only on the dispatch code sequence itself, but also on the code
surrounding the call and on the processor ability to detect and
take advantage of instruction level parallelism.
An estimate of dispatch overhead, based on real programs and
relying on super scalar processor simulation, can be
found in [DH96].
The authors measure a median dispatch overhead of 5.2% in C++
programs and 13.7% in C++ programs with all member functions declared
virtual (as is the default in Java).
For one program, the overhead was as high as 47% of the total
execution time.
While evidence from practice suggests that most Java programs exhibit
little polymorphism at run time, it is true that for some programs the
optimizations tested in this study can make as much as a 50%
difference in execution time, as demonstrated by the micro-benchmarks.
It thus appears very sensitive to optimize dynamic
dispatch, in order to avoid incurring a significant performance penalty
when relying on the object-oriented design style.
Alternative implementation techniques are available to perform
dispatch to multiple targets without using expensive branch instructions.
Unfortunately, comparing the performance of these competitive
techniques is hard, and the literature typically reports measurements
of few alternatives, on only one execution environment.
In this study, we propose and report on the results of a proof-of-concept
methodology to measure the performance of several control
structures for dynamic dispatch on a variety of Java Virtual
Machines and hardware platforms.
In this first-step study, we rely on micro-kernel benchmarking
to determine and magnify the relative performance of control
instructions under a large number of varying execution conditions.
The results show, among other things, that:
- Virtual method call performance is highly dependent on the
execution pattern at a particular call site
- When the call site has a low (2-3 target types) to medium (6-8
target types) degree of polymorphism, optimizations are
possible that improve performance across JVMs
and hardware platforms (that is, platform independent optimization)
- Processor architecture shines through, especially on
high-performance JVMs: the performance profile from different VMs
executing on the same hardware look similar, those from the same
VM executing on different hardware look different.
This paper is organized as follows.
Section 2 reviews dynamic dispatch implementations and
related work at software, run-time system and hardware level.
Section 3 presents our methodology and the
experimental setup.
Section 4 presents some of our results and discusses
them.
Finally, section 5 concludes and points at future
research directions.
2 Background
2.1 Monomorphism vs. Polymorphism
Dynamic dispatch is expensive because the target method depends on the
run-time type of the receiver, which generally cannot be determined
until actual execution.
Many different optimization techniques have thus been proposed, which
can be seen as falling into two broad categories:
- Optimizing monomorphic calls
-
Since dynamic dispatch is expensive, the fastest way to do it is to avoid
it altogether.
Various kinds of program type analysis
(such as [DGC95,SLCM99,SHR+00]) enable the
de-virtualization of provably monomorphic calls (calls with only one
target type), replacing the expensive
late-bound call by by a direct, cheaper, early-bound call.
This technique has the added advantage of allowing inlining of target
methods, thus stripping away all of the call overhead and enabling a more
radical optimization of the inlined code by classical methods.
Dynamic optimization (e.g [DDG+96,HU94]) such as
employed by the
SUN HotSpot Server JVM
allows method inlining at run time, which permits further optimization of
calls that are monomorphic in only a particular run of the program, even
though multiple target types are possible after compile time.
- Optimizing polymorphic calls
-
In spite of all efforts, some calls cannot be resolved as monomorphic.
Optimizing the remaining polymorphic ones (calls with more than one
target type) is crucial.
Program type analysis can also optimize these polymorphic calls,
especially when the number of possible types is very low.
For example, a compiler can replace a late-bound call with two
possible target types by a conditional branch and two static, direct,
early-bound calls.
At run time, a cheap conditional branch and cheap static call are
executed instead of one expensive late-bound call (strength
reduction).
Such a strength reduction operation is usually a win on current
processors, since prediction of conditional branches is easier than
prediction of indirect branches.
Furthermore, the dominant (most common) call direction can be inlined,
leading to similar optimization opportunities as for monomorphic
calls, with the guard of a cheap conditional branch [AH96].
Dynamic optimization can also replace a call that is dominated
by one target type at run time, enabling the same operation as above
with increased type precision.
These solutions to optimize dynamically dispatched calls are amenable to two
approaches: hardware and software.
2.2 Hardware Solutions
Virtual method invocations in Java translate, in the native machine
code, into two dependent loads followed by an indirect branch
(or indirect jump).
This indirect branch is responsible for most of the call
overhead [Dri01].
Branches are expensive on modern, deeply pipelined processors
because the next instruction cannot be fetched with certainty until
the branch is resolved, typically at a late stage in the pipeline
(e.g., after 10-20 cycles on a Pentium III).
Most processors try to avoid these pipeline bubbles by speculatively
executing instructions of the most likely execution
path, as predicted by separate branch prediction
micro-architectures.
For example, a Branch Target Buffer (BTB) stores one target for each
indirect, multi-way branch and can predict monomorphic branches with
close to 100% accuracy, which removes the branch misprediction
overhead in the processor.
Unfortunately, polymorphic calls are harder to predict.
Sophisticated two-level indirect branch hardware predictors
[CHP98]
can provide a similar advantage as a BTB for multi-target
indirect branches that are ``regular'' and whose target correlates
with the past history of executed branches.
Unfortunately, indirect branches are more difficult to predict than
conditional branches.
A conditional branch has only one target, encoded in the
instruction itself as an offset, so a processor only needs
to predict whether the conditional branch is taken or not (one bit).
Indirect branches can have many different targets and therefore
require prediction of the complete target address (32 or 64 bits).
Sophisticated predictors [DH98a,DH98b] can reach high
prediction rates, but generally require large on-chip structures.
Indirect branch predictors thus tend to be more costly and
in practice less accurate than conditional branch predictors (Branch
History Buffers, BHTs), even in modern processors.
Therefore, replacing at the code level a rather unpredictable indirect,
multi-way branch by
one or several more predictable conditional branches followed by a
static call seems a likely optimization, helping the processor.
This strength reduction of control structures is exploited by several
of the techniques in the next section.
2.3 Software Solutions
Most JVMs include some way to de-virtualize method invocations
that are actually monomorphic, by replacing the costly polymorphic
call sequence by a direct jump.
For example, various forms of whole program analysis (e.g.,
[BS96,SHR+00]) show that most invocations
in object-oriented languages are monomorphic.
Some JVMs use a dynamic approach.
For example, HotSpot relies on a form
of inline caching [DS84,UP87].
The first time a virtual method invocation is executed, it is
replaced by a direct call preceded by a type check.
Subsequent executions with the same target are thus direct, whereas
executions with a different target fall back to a standard virtual
function call.
Actual run-time polymorphism can also be optimized in software,
for example by using Binary Tree Dispatch (BTD), as implemented in
the SmallEiffel compiler [ZCC97].
BTD replaces a sequence of powerful dispatch instructions using an
indirect branch by a sequence of simpler instructions (conditional
branches and direct calls).
When the sequence of simple instructions remains small, it can be
more efficient than a call through a virtual function table, and
should perform particularly well on processors with accurate
conditional branch prediction and large BHT.
A BTD is a static version of what is commonly known as a Polymorphic
Inline Cache [HCU91].
A PIC collects targets dynamically at run time (it is a restricted
form of self-modifying code), effectively translating a lengthy method
lookup process into a sequential search through a small number of
targets.
The if sequence control structure exercised in our micro
benchmark
suite (see section 3.3) is akin
to the implementation of a PIC described in [HCU91].
As in the latter paper, we found that megamorphic [DHV95]
call sites (more
than 10 possible target types) are too large for a sequential if
to be cost-effective.
Chambers and Chen also proposed a hybrid implementation mechanism
[CC99] for dynamic dispatch that can choose between
alternative implementations of virtual calls based on various
heuristics.
The experiments in our study complement their approach, since we aim
to more precisely define the gains and cutoff points reachable with
each technique on multiple platforms.
3 Methodology
3.1 Overview
We started this work in order to find out whether control structure
strength reduction could be used to optimize dynamic dispatch under
specific execution conditions and across different hardware
platforms, i.e. to find out whether platform independent optimization
is feasible.
In order to allow platform independent optimization to be effective,
two conditions must hold.
First, strength-reducing operations must be guided by
platform independent information; the analysis may include profile
data if it is not platform-specific.
Second, the performance of control structures must be consistent
across platforms.
The first condition is fulfilled by various forms of static program
analysis and program-level profiling, and many studies show that
optimizable call sites are common.
The second condition needs to be verified.
Even the reasonable assumption that direct static calls are faster
than monomorphic virtual ones may not always hold in practice due
to implementation features, at the virtual machine level or at the
processor micro-architecture level.
For instance, a Pentium III stores the most recent target of indirect
branches, which can make monomorphic virtual calls as
efficient as static calls.
In the next section we discuss our experimental framework to
measure performance of control structures across different
JVM and hardware platforms.
3.2 Experimental Setup
Since we focus on polymorphic calls, a large variety of execution
behaviors and control structures has to be measured on several
platforms.
Therefore, we design a comprehensive suite of Java micro benchmarks
as a proof-of-concept simulation of various implentations of dynamic
dispatch in various JVMs.
This allows us to test the performance of control structures under
controlled execution conditions, leveraging the wide availability of
the Java VM to measure on different execution environments.
All benchmarks use the same superstructure: a long-running loop that
calls a static routine which performs the measured dispatch.
The receiver object (actually, its type ID) is retrieved from a large
array, which is initialized from a file that stores a particular
execution pattern as a sequence of type IDs.
This initialization process ensures that compile-time prediction of the
type pattern is impossible.
Different files store a variety of type ID sequences, representing
different patterns and degrees of polymorphism.
The experimental parameter space thus varies along three dimensions:
- Control structures
- How do different different control
structures for dynamic dispatch perform?
- Execution patterns
- This dimension has three related sub-dimensions.
First, the static number of possible receiver types at the
dispatch site, which influences the program code and can be
determined by program analysis before execution.
Second, the dynamic number of receiver types at the
dispatch site, that is the range of types occurring in a
particular program run.
Third, the pattern of receiver type IDs, that is the
order and variability of receiver types at run time.
- Execution environments
- This dimension has two related
sub-dimensions: the virtual machine used and the processor it is run on.
Each data point (timing) within this parameter space is measured as
follows.
First, the benchmark is run 5 times over a long (10 million) loop, which gives
a ``long run average'' running time.
This average comprises only the loop part (not the initialization).
When executed on dynamically optimizing JVMs such as HotSpot, this
execution time comprises both the execution as ``cold code'' and the
execution as optimized once the optimizer has determined the loop is a
``hot'' one.
The JVM is thus given ample opportunity to fully optimize control
structures.
Then, the benchmark is re-run 5 times over a very long (60 million)
loop, which provides a ``very long run average''.
The difference between these two averages, ``long'' and ``very long'',
represents only ``hot'', optimized loops, and gives us our final
result, after normalization to 10 million loops.
The three dimensions of the parameter space are detailed in sections
3.3,
3.4 and 3.5.
3.3 Various control structures
We measure a variety of control structures for dynamic dispatch
implementation.
Although it is not comprehensive, we believe it covers the main
possibilities available to optimizing compilers at the bytecode and
native code level.
- Virtual calls
-
At the Java source code level, a dispatch site is a simple method
call: x.foo().
At the Java bytecode level, a special instruction, invokevirtual, is provided to implement virtual calls.
The dynamic dispatch instruction uses the message signature
(argument to the invokevirtual bytecode) and the dynamic type
of the receiver object (atop the stack) to determine the actual target
method.
Generally, this translates at the hardware level into a table-based
indirect call [ES90].
This constitutes the first implementation of dynamic dispatch we
tested, in our ``Virtual'' series of micro-benchmarks.
It is however possible to use other control structures, based on
simpler bytecode instructions, such as type equality tests followed by
static calls.
These control structures can take at least three forms:
- If sequence
-
First, a sequence of 2-way conditional type checks can be used.
For example, let's assume a polymorphic site x.foo() where
global, system-wide analysis detected that the receiver could
only have four possible concrete types at runtime:
 , ,  , ,  and
and  .
The corresponding pseudo-code is shown in
figure 1,
where
the tests discriminate between all the known possible types and lead
to the appropriate leaf static call.
This implementation of dynamic dispatch is tested in our
``IfSequence'' series of micro-benchmarks, where the type ID is an
integer stored in an extra field of every object. .
The corresponding pseudo-code is shown in
figure 1,
where
the tests discriminate between all the known possible types and lead
to the appropriate leaf static call.
This implementation of dynamic dispatch is tested in our
``IfSequence'' series of micro-benchmarks, where the type ID is an
integer stored in an extra field of every object.
Figure 1:
P-code for if-sequence dispatch
 |
A variant of this would not test against a type ID field
added to the objects, but use a series of instanceofs
expressions.
This technique would avoid the need for the type ID field, and the
associated space and initialization overhead.
Its performance compared to the if sequence above would mostly be
related to the relative performances of the instanceof and getfield bytecodes instructions.
We did not include this variant in our benchmarks.
Another variant consists in accessing the type descriptor (Class
object) of the receiver, using the getClass() method, instead of
the type ID field.
Since getClass() is a final native function of Object,
with JVM support, it is likely to be quite fast.
This technique also avoids the need for the type ID field and the
associated costs.
However, the type test would have to be done against
CLASS_FOR_TYPE_A,
CLASS_FOR_TYPE_B, etc. instead
of ID_FOR_TYPE_A,
ID_FOR_TYPE_B, etc.
Retrieving each of these class descriptors incurs a cost as well,
using either a static method for each class, or (in the context of our
proof-of-concept Java micro-benchmarks) the more general
function forName (String
className) in class Class,
whereas the type IDs are constants.
This variant thus also seems to be potentially slower.
We did not include it in our benchmarks.
- Binary Tree
-
Such 2-way conditional tests can be organized more efficiently,
as a binary decision tree [ZCC97].
Let's assume the type IDs corresponding to the types , ,
and , are, respectively, 19, 12, 27 and 15.
Then, the pseudo-code generated for x.foo() looks like the one
in figure 2.
We test this implementation of dynamic dispatch in our
``BinaryTree'' series of micro-benchmarks.
Figure 2:
P-code for binary tree dispatch
 |
Note that a BTD using the getClass() variant described above for
if sequence would be slower than the one we present, since the
tests in the dispatch tree would not be done with constants anymore.
We thus did not include this variant in our benchmark suite.
- Switch
-
Finally, a multi-way conditional instruction can be used, namely a
Java dense switch, translated into a tableswitch bytecode
instruction, whose suggested implementation [LY99] by the
JVM is an indirection in a table.
The corresponding pseudo-code, tested in our ``Switch'' series of
micro-benchmarks, is shown in figure
3.
Figure 3:
P-code for tableswitch dispatch
 |
For the sake of simplicity, we only test dense switches.
Indeed techniques exist (global analysis, coloring,...) to have a
compact allocation of type IDs.
In case of sparse type IDs, sparse switches should be
translated into a standard lookupswitch [LY99] bytecode
instruction, that can be implemented by the JVM as a
series of ifs or a binary search, thus falling back to one of
the techniques we already present in this study.
The general idea behind strength reduction for dynamic dispatch is
that simpler instructions, although more numerous, should be more
predictable and executed faster than complex instructions.
All these control structures, except the plain invokevirtual, have a size that is proportional to the number of
tested types.
When used to implement dynamic dispatch, without any fall-back
technique, all possible types have to be tested; this set of
possible types thus has to be determined by a global analysis.
This is accounted for in our benchmark suite, by creating,
for each distinct dispatch technique, several benchmarks differing
only by the number of types they can handle.
In the last three control structures,
the leaf calls are purely monomorphic.
They are thus implemented as Java static
calls X.static_foo(x),
with the original receiver object being passed as the first argument
(instead of being
the implicit this argument in the virtual call).
We thus gave a ``StaticThisarg'' suffix to these benchmarks.
We also
benchmark leaves implemented as monomorphic virtual calls which, as
we expected, turn out to be generally slower than the static
leaves.
As a consequence, we do not detail those results in this paper.
Figure 4:
Comparison summary of various control structures
 |
Note that the last three techniques may also be used to serve as run-time
adaptive caches catching the
most frequent or more recent types, preceding a more general fall-back
technique.
In this case, they would be akin to PICs, or more accurately, as
different alternative control structures which can be used to
implement various sizes of PICs.
Figure 4 shows a synthetic
comparison of these four control structures.
3.4 Various type patterns
The runtime behavior of the program is another crucial factor in
the performance of a given dynamic dispatch site.
In order to simulate varying behaviors while keeping precise control,
we timed our benchmarks by generating various type ID patterns.
Each micro benchmark reads a particular pattern from file at run time
to initialize a 10K int array holding type IDs, which is then iterated
over a large number of times.
For this study, we used synthetic patterns which represent extremes
in program behavior.
We plan to use real applications or real application traces in future
work.
We decided
to design patterns comprising between one and 20 possible receiver types,
in order to cover a wide range of cases.
In most real applications though, the degree of polymorphism remains
typically much smaller (3 to 5).
The low degrees of polymorphism in our tests thus have a lot of
importance for most cases, while higher degrees tend to show how a
specific technique scales up.
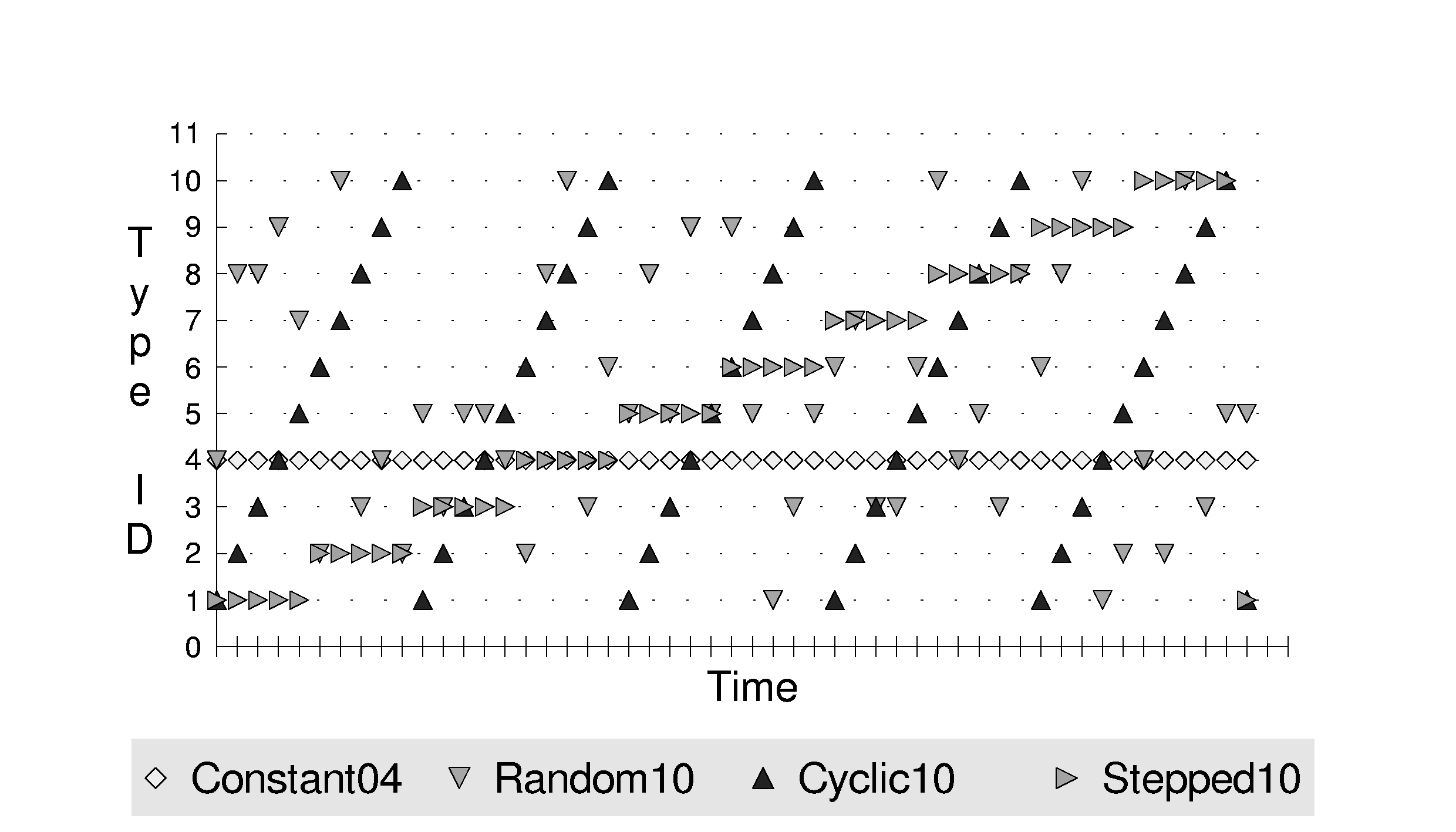
The following four patterns are presented below and in figure
5: the constant
pattern, the random pattern, the cyclic pattern and the stepped
pattern.
- Constant
- This pattern is the simple 100% monomorphic case, where the
receiver type is always the same and is thus perfectly
predictable.
This is a very common case.
Various techniques
detect such monomorphic dispatch sites and get rid of them
by replacing them with direct calls (de-virtualization).
However, these techniques may not always be applied,
do not detect all monomorphic call sites and do not handle call sites
that are in principle polymorphic but never change targets within any
single run.
It is thus worth testing the behavior of dynamic dispatch techniques
on this best-case constant pattern.
Since the value of the constant type ID influences performance,
we have to test various IDs within the static range.
- Random
- This pattern is the exact opposite of the previous one:
it can't be predicted, features high polymorphism (many receiver
types) and high variability (many changes during execution).
As such, it represents a worst-case scenario likely to be rare in
object-oriented programs.
- Cyclic
- The cyclic pattern features a regular variation of the
type ID, each ID being the previous one incremented by 1 up to maxID
and back to 1, and so on.
This pattern is thus highly polymorphic and has a very high
variability (the type changes at every call), like the random pattern,
but is still very regular.
Advanced micro-architecture such as two-level branch predictors are
capable of detecting some cyclic branch behavior
and therefore should predict this pattern accurately, especially for
small cycles.
As such, and even though it is probably fairly uncommon in OO
programs, this pattern represents a kind of intermediate point between
constant and random.
- Stepped
- This pattern is a regular variation of the
cyclic pattern, close to the constant pattern in behavior.
It features a variation of the type ID from 1 to maxID, with increments
of 1, but with as few changes as possible within a single run.
It thus exhibits long, constant steps, whereas the cyclic pattern has a
step length of 1.
The stepped pattern has the same degree of polymorphism as the
cyclic one (same number of types), but much lower variability.
It should thus be highly predictable, even by simple predictors
such as a Branch Target Buffer.
This stepped pattern is probably quite common in object-oriented
programs, for example when iterating over containers of objects, which
often contain
instances of a single type.
Figure 5:
Patterns dynamic behavior
|
3.5 Various execution environments
The execution environment is the last varying dimension in
our study and consists
of two parts: the hardware platform and the virtual machine used
to execute the benchmarks.
Running different virtual machines is similar to testing a particular
program using different compilers.
The addition of an extra execution layer, the JVM, makes execution
more complex and makes it significantly harder
to interpret performance results, but it provides platform-independence
and is thus essential to our approach.
The benchmark suite was run on three hardware platforms:
- SUN UltraSparc III
- This machine is based on one 750 MHz processor
and 1 GB of RAM, with SunOS 5.8.
- Intel Pentium III
- This machine has dual 733 MHz processors, with
512 MB of RAM, running Linux Mandrake with kernel 2.2.19.
Note that for our benchmarks, dual processor capability should have
little if no impact.
- Intel Celeron
- This lower-end machine comprises one 466 MHz Celeron
with 192 MB of RAM and Linux Mandrake with kernel 2.2.17.
Of course, not all JVMs are available on all hardware platforms.
Furthermore, the fact that a JVM is available under the same name on
several different OS and hardware platforms is no guarantee at all they are
indeed the same JVM: their back-ends for instance must be different.
The JVMs tested during this study are generally in their 1.3.1
version.
We show the IBM JVM (known as ``the Tokyo JIT'') and the SUN HotSpot
Server as examples of high-performance JVMs and
the SUN HotSpot Client, which is the most widely available JVM,
and runs on many different hardware platforms.
The following result section shows the essence of the large
amount of data gathered.
4 Results and discussion
As explained in the previous section, we measure the performance of
different control structures in a number of varying dimensions:
hardware, JVM, number of possible types (static) and type pattern
(dynamic).
This leads to a vast parameter space, in which we gather a very large
number of data points (more than 21,000).
For space constraints reasons, we cannot show all the data and
therefore we pick a representative sample: the
dual Pentium III and the UltraSparc III, two hardware platforms
described in section 3.5.
The Celeron provides results very similar to the Pentium III, which is
consistent with the fact both processors share the same architectural
core; we thus did not include Celeron figures in this paper.
We also focus on a maximum number of possible types (static) of 20,
which allows testing both low and high degrees of polymorphism, with
patterns featuring as low as 1 actual live type at runtime
(monomorphic) and as many as 20 (megamorphic [AH96]).
Overall, this maximum degree of polymorphism of 20 is representative
of behaviors and data we gathered at various sizes (we
actually tested all maximum sizes from 1 to 10, then 20, 30,
50 and 90).
Shorter static type sizes, which are the most common in real
applications, typically lead to more efficient
if sequences and binary search trees.
Results are presented in figures
6 and
7,
that show two different JVMs on the same
Pentium platform, as well as in figures
8
and
9
that show the HotSpot client JVM on two different hardware platforms.
On all these graphs, the
same 5 benchmarks are tested, resulting in the 5 curves on each graph:
- Virtual20
- A plain virtual call, implemented with the invokevirtual bytecode, that can
cope with any number of possible receiver types
![[*]](file:/usr/share/latex2html/icons/footnote.png) . .
- BinaryTreeStaticThisarg20
- This is a binary tree dispatch, with 20
leaves that are static calls, the receiver object being passed as an
explicit argument.
- IfSequenceStaticThisarg20
- A sequence of ifs containing 20 static
leaf calls.
- SwitchStaticThisarg20
- A Java switch, translated into a tableswitch bytecode with 20 cases, each being a static call.
- NoCall20
- This benchmark contains no call at all, it shows the
base cost of the benchmark mechanism (loop and static method
call).
The different control structures are tested against 41 execution
patterns of the four kinds presented in
section 3.4,
constant, cyclic, random and
stepped, that compose the x axis.
The numbers appearing in the pattern name indicate the active range
of type IDs for each pattern.
Thus rnd-01-07 is a pattern made of random type IDs between
1 and 7, step-01-09 is a type ID pattern with 9
steps, from 1 to 9, and cst-04 is a pattern with constant type
ID 4, and so on.
4.1 Observations
Figure 6:
IBM cx130-20010502 on a dual Pentium III
|
Figure 7:
SUN HotSpot Server 1.3.1-b24 on a dual Pentium III
|
Figure
6
shows performance in milliseconds of execution time for the IBM JIT on
a Pentium III.
Plain virtual calls (invokevirtual, shown as continuous
black curve) appear to be sensitive to the dynamic execution patterns
tested.
Virtual calls executing constant patterns and stepped patterns take
about 700 ms, compared to 1000 ms for cyclic and random patterns.
The NoCall20 micro-benchmark executes in 600 ms.
Therefore the overhead of virtual calls varies between 100 and 400 ms,
a factor of four due only to differences in type patterns.
Other JVMs on the Pentium platform show similar ratios
(figures
6 and
7).
On an UltraSparc III
(figure 9),
virtual calls appear less sensitive to
execution patterns.
The constant pattern is executed slightly more efficiently, but a
stepped pattern shows the same performance as a random or cyclic
pattern.
In contrast, stepped patterns with low variability behave well on all
Pentium JVMs (figures
6,
7 and
8),
with a cost close to that of the constant pattern.
Overall, virtual calls tend to be more expensive than other structures
especially when the number of different types is small and when
the type pattern is cyclic.
These results indicate optimization opportunities for JVM implementors.
The performance of if sequences depends on the size of
the sequence and the rank of ifs exercised, shorter sequences being
faster.
Short if sequences are the most efficient way to
implement dynamic dispatch among the tested control structures
across all platforms, all JVMs and all execution patterns.
Although the precise cutoff point varies, it is safe to consider that
if sequences up to 4 are a sure win over current implementations
of virtual calls.
The actual gain in performance varies but can be as high
as 52% (including benchmark
overhead)
on the duomorphic cycl-01-02 pattern on HotSpot Server on
Pentium III (figure
7)
or 24%
on the step-01-02 pattern on
HotSpot Client on UltraSparc III (figure
9).
Therefore one can significantly optimize the implementation of dynamic
dispatch in current JVMs when the number of possible types is known
(by static analysis or dynamic sampling) to be small.
Binary tree dispatch (BTD) provides another way to perform
strength reduction of dynamic dispatch sites.
Binary trees appear to be significantly faster than virtual calls in
most cases (all figures, particularly figures
7
and 9).
When BTDs are slower than virtual calls, it is generally by a small
margin, as figures
6 and
8
show.
Since the cost of BTD grows as the logarithm of the number of branches,
whereas sequences of ifs have a linear cost, BTD is more scalable.
This makes BTD a good implementation for dynamic dispatch when the
number of types is too large to use simple if sequences (above 4
or 8,
depending on the JVM and platform), but small enough to prevent
extensive code expansion.
The cutoff point where BTD become faster than if sequences is
clearly visible for cyclic patterns on all JVMs and platform,
and for constant and stepped patterns in the SUN HotSpot JVMs on
both platforms (figures
7,
8
and
9).
Figure
6
shows that Java dense switches (bytecodes tableswitch), when
used to implement dynamic dispatch, result in performance very similar
to that of virtual calls on the IBM JVM, revealing an implementation
based on jump tables.
In the HotSpot Client JVM however, both on Pentium III and UltraSparc III
(figures
8
and
9),
tableswitches behave exactly
like if sequences, which indicates an
actual implementation based on sequences of conditional branches.
Table switches are therefore unreliable in terms of performance across
JVMs.
The ``Infinite...'' results in figure
7
correspond to executions of NoCall20 that were running
forever.
We think that this behavior indicates an optimization bug on this
particular JVM and platform, since the call of an empty method is an
unlikely (but legal) occurrence, and all other JVMs dealt with it
correctly.
Indeed, the exact same bytecode for NoCall20 is correctly executed on all
other JVM-platform combinations, that is with all other JVMs on the same
platform and with all JVMs on all other platforms (we also checked on
Athlon and Celeron).
The same problem happens under the exact same conditions for other
NoCall benchmarks with other sizes, but is much less frequent.
Since all our benchmarks are very small and simple and share most of
their code, we are confident their Java source code (including the one
for NoCall20) is correct.
Furthermore, since all the benchmarks are executed correctly on all
JVM-platform combinations but one, we trust the javac compiler
generated a correct bytecode.
We thus suspect some aggressive, non-systematic optimizations by the
JVM might be the cause of this issue.
Figure 8:
SUN HotSpot Client 1.3.1-b24 on a dual Pentium III
|
Figure 9:
SUN HotSpot Client 1.3.1-b24 on UltraSparc III
|
4.2 Discussion
Obviously, using micro-benchmarks focused on dynamic dispatch
magnifies the impact of the various dispatch techniques in terms of
performance.
Although the actual impact on real programs is likely to be smaller,
since programs generally do other things than dispatch, our study makes
it possible to get a clearer view of what is actually happening.
We thus believe that the previous results are an important first step
and can already be widely used.
First,
these results are important to Java compiler and Java VM designers,
when implementing multiple-target control structures
such as dynamic dispatch.
We show that the performance of dynamic dispatch
varies a lot across JVMs, hardware and execution patterns.
It is safe to say that dynamic dispatch implementation in
current JVMs is not always optimal and can be significantly improved,
using mostly known techniques.
Direct implementation in the virtual
machine is likely to provide the highest payoff.
Second, these results are also useful to Java developers,
since they stress differences between the various JVMs,
highlighting strengths to take advantage of and weaknesses to avoid,
for instance large tableswitches in the HotSpot Client.
Third, our results show that strength reduction of control structures
is likely to be beneficial regardless of the hardware and JVM,
when the number of possible receiver types can be determined to be
small.
For numbers of possible types up to 4, if sequences are most
efficient.
Between 4 and 10, binary tree dispatch is generally preferable.
For more types, the best implementation is a classical table-based
implementation such as currently provided by most JVMs for virtual
calls.
These are safe, conservative bets, that generally provide a
significant improvement and, when not optimal, result only in a small
decrease in performance.
Finally, these measurements expose architectural features
(especially branch predictors) of the target hardware.
For instance, when executing virtual calls
the Pentium III branch target buffer ensures that constant patterns
have performance nearly identical to that of slowly changing stepped
patterns, whereas this is not the case for the UltraSparc III.
Similarly, when executing if sequences, small cyclic patterns are
predicted accurately by the Pentium's conditional branch predictor,
which, for all JVMs, results in better performance
on small cyclic patterns than on random patterns.
Consequently, the results we provide in this paper can be applied at
various levels.
The information we gathered can be used by a static compiler (e.g.,
javac) that performs a static analysis of the program to determine at
compile time the number of possible types, and generate bytecode
relying on
the most appropriate implementations of dynamic dispatch for each call
site, either aggressively targeting a particular platform or
conservatively performing transformations for multiple platforms.
An extra type ID field might have to be added to all
objects, which would lead to per-object space overhead as well as
initialization time overhead.
However, smart implementations (see [CZ99] for an example in
the context of Eiffel) can avoid the need for the type ID field for
objects which are not subject to actual dynamic dispatch, as detected
by global analysis.
The type ID overhead can also be made smaller than an integer, for
example when the number of types subject to dispatch fits in 16 or 8
bits, or by packing the type ID in available bits in the objets.
Initialization overhead is dependant on the objets lifetime, creation
rate, and call frequency, and thus varies between applications.
Space and initialization overhead thus have to be better quantified to
find the conditions under which each solution is the best.
JVM implementers can also make use of this information in a rather
similar way, by dynamically compiling bytecode into the most suitable
native code structures, based on program execution statistics.
Dynamic optimizers
could thus switch between several dynamic dispatch mechanisms,
depending on context, execution environment and profiling
information.
Finally, micro-architecture designers can use these measurements to
determine how to better support the execution of JVMs and the programs
that run on those JVMs, in particular with respect to dynamic dispatch, for
instance by providing improved branch prediction mechanisms.
As mentioned in section 3.3,
all the control structures we studied, except the plain invokevirtual, have a size that is proportional to the number of
tested types.
This number can become quite large, in real OO programs; for example, in
the SmallEifel compiler, the maximum arity at a dispatch site is
about 50 [ZCC97].
In such cases, an increase in code size could happen, with adverse
effects on caches and performance, and thus would have to be mastered.
We did not work on this aspect in the present study relying on
micro-benchmarks.
However, in the SmallEiffel projet, we tackled this issue and used a
simple but efficient solution, which consists in factorizing all
identical dispatch sites into one or a few dispatching routines
(``switch'' functions in [ZCC97]).
Although we have obtained good results with this technique in Eiffel,
we still have to mesure its feasabibility in Java.
5 Conclusions and future work
The implementation of dynamic dispatch is important for
object-oriented program performance.
A number of optimization techniques exist, aimed at de-virtualizing
polymorphic calls which can be determined, either at compile-time or
runtime, to be actually monomorphic.
Complementary techniques, either software- or hardware-based, seek to
optimize actual run-time polymorphism as well.
We present a prototype study of various control flow structures for dynamic
dispatch in Java, with varying hardware, virtual machine and execution
patterns.
Our results clearly show that:
- Virtual call performance is highly dependent on the execution
pattern at a particular call site.
- When the call site has a low or medium degree of polymorphism
(2-3 target types up to about 10), strength reduction of control
structures is likely to improve performance across platforms,
using if sequences for up to 4 different target types and
Binary Tree Dispatch between 4 and 10 different types.
- Processor architecture shines through, more especially on
high-performance JVMs: virtual call performance of stepped
patterns, for example, is markedly different on different
platforms, but does not vary across different JVMs on the same
platform.
In future work, we could experiment with more techniques or
variants for dynamic dispatch, such as the ones we mentioned in
section 3.3, and more platforms
(JVM or hardware).
Another area we have to work on is interface dispatch in Java, which
is more complex because of multiple interface inheritance, and where
some of the techniques we described are not
easily applied.
We also plan to more precisely assess the efficiency of
the techniques we described by completing our micro-benchmarks suite
with larger, real Java programs.
This would give
more applicable, although less precisely understandable, results.
We also intend to evaluate the impact of these various dispatch
techniques with respect to code size and memory footprint, especially
for techniques whose code size is proportional to the number of types
(if sequences and BTD).
We can do so by applying our results either to
open-source bytecode optimizers, such as Soot [VRHS+99], or
directly to Java
Virtual Machines, like the Open VM [Va01], the Jikes Research
VM [IBM01] (formerly named Jalapeño) or the
SableVM [GH01].
We thank Laurie Hendren and Feng Qian, who helped us in early stages
of our experiments.
We thank everyone who commented on the poster presentation of
this work at OOPSLA 2001.
We are also grateful to Wade Holst and Raimondas Lencevicius who
commented on early versions of this paper, and Matthew Holly who
proofread it.
Finally, we thank the anonymous reviewers for their valuable comments and
suggestions.
This research was supported by NSERC and FCAR (Canada), and INRIA
(France).
- AH96
-
Gerald Aigner and Urs Hölzle.
Eliminating Virtual Function Calls in C++ Programs.
In 10th European Conference on Object-Oriented Programming
(ECOOP'96), volume 1098 of Lecture Notes in Computer Science, pages
142-166. Springer-Verlag, 1996.
- BS96
-
David F. Bacon and Peter F. Sweeney.
Fast Static Analysis of C++ Virtual Function Calls.
In 11th Annual ACM Conference on Object-Oriented Programming
Systems, Languages and Applications (OOPSLA'96), pages 324-341. ACM Press,
1996.
- CC99
-
Craig Chambers and Weimin Chen.
Efficient Multiple and Predicated Dispatching.
In 14th Annual ACM Conference on Object-Oriented Programming
Systems, Languages and Applications (OOPSLA'99), pages 238-255. ACM Press,
October 1999.
- CHP98
-
Po-Yung Chang, Eric Hao, and Yale N. Patt.
Target Prediction for Indirect Jumps.
In 1997 International Symposium on Computer Architecture
(ISCA'97), July 1998.
- CZ99
-
Dominique Colnet and Olivier Zendra.
Optimizations of Eiffel programs: SmallEiffel, The GNU Eiffel
Compiler.
In 29th conference on Technology of Object-Oriented Languages
and Systems (TOOLS Europe'99), pages 341-350. IEEE Computer Society, June
1999.
- DDG+96
-
Jeffrey Dean, Greg DeFouw, David Grove, Vassily Litvinov, and Craig Chambers.
Vortex: An Optimizing Compiler for Object-Oriented Languages.
In 11th Annual ACM Conference on Object-Oriented Programming
Systems, Languages and Applications (OOPSLA'96), pages 83-100. ACM Press,
1996.
- DGC95
-
Jeffrey Dean, David Grove, and Craig Chambers.
Optimization of Object-Oriented Programs Using Static Class
Hierarchy Analysis.
In 9th European Conference on Object-Oriented Programming
(ECOOP'95), volume 952 of Lecture Notes in Computer Science, pages
77-101. Springer-Verlag, 1995.
- DH96
-
Karel Driesen and Urs Hölzle.
The Direct Cost of Virtual Function Calls in C++.
In 11th Annual ACM Conference on Object-Oriented Programming
Systems, Languages and Applications (OOPSLA'96), pages 306-323. ACM Press,
1996.
- DH98a
-
Karel Driesen and Urs Hölzle.
Accurate Indirect Branch Prediction.
In 1998 International Symposium on Computer Architecture
(ISCA'98), July 1998.
- DH98b
-
Karel Driesen and Urs Hölzle.
The Cascaded Predictor: Economical and Adaptive Branch Target
Prediction.
In Micro'98 Conference, pages 249-258, December 1998.
- DHV95
-
Karel Driesen, Urs Hölzle, and Jan Vitek.
Message Dispatch on Pipelined Processors.
In 9th European Conference on Object-Oriented Programming
(ECOOP'95), volume 952 of Lecture Notes in Computer Science, pages
253-282. Springer-Verlag, 1995.
- DLM+00
-
Karel Driesen, Patrick Lam, Jerome Miecznikowski, Feng Qian, and Derek Rayside.
On the Predictability of Invoke Targets in Java Byte Code.
In 2nd Annual Workshop on Hardware Support for Objects and
Microarchitectures for Java, pages 6-10, September 2000.
- Dri01
-
Karel Driesen.
Efficient Polymorphic Calls.
The Kluwer International Series in Engineering and Computer Science.
Kluwer Academic Publishers, 2001.
- DS84
-
Peter L. Deutsch and Alan Schiffman.
Efficient Implementation of the Smalltalk-80 System.
In 11th Annual ACM Symposium on the Principles of Programming
Languages (POPL'84). ACM Press, 1984.
- ES90
-
Margaret A. Ellis and Bjarne Stroustrup.
The Annotated C++ Reference Manual.
Addison-Wesley, Reading, Massachusetts, 1990.
- GH01
-
Etienne Gagnon and Laurie Hendren.
SableVM: A Research Framework for the Efficient Execution of Java
Bytecode.
In 1st Java Virtual Machine Research and Technology Symposium
(JVM '01), pages 27-39. The USENIX Association, April 2001.
- GJSB00
-
James Gosling, Bill Joy, Guy Steele, and Gilad Bracha.
The Java Language Specification.
The Java Series. Addison-Wesley, 2000.
Second Edition.
- HCU91
-
Urs Hölzle, Craig Chambers, and David Ungar.
Optimizing Dynamically-Typed Object-Oriented Languages with
Polymorphic Inline Caches.
In 5th European Conference on Object-Oriented Programming
(ECOOP'91), volume 512 of Lecture Notes in Computer Science, pages
21-38. Springer-Verlag, 1991.
- HU94
-
Urs Hölzle and David Ungar.
Optimizing Dynamically-Dispatched Calls with Run-Time Type
Feedback.
In 1994 ACM SIGPLAN Conference on Programming Language Design
and Implementation (PLDI'94), volume 29 of SIGPLAN Notices, pages
326-336. ACM Press, 1994.
- IBM01
-
IBM Research - Jalapeño Project.
The Jikes Research Virtual Machine.
https://www.ibm.com/developerworks/oss/jikesrvm, 2001.
- Lis88
-
Barbara Liskov.
Data Abstraction and Hierarchy.
In Special issue: Addendum to the proceedings of OOPSLA'87,
volume 23 of SIGPLAN Notices, pages 17-34. ACM Press, May 1988.
- LY99
-
Tim Lindholm and Frank Yellin.
The Java Virtual Machine Language Specification.
The Java Series. Addison-Wesley, 1999.
Second Edition.
- SHR+00
-
Vijay Sundaresan, Laurie Hendren, Chrislain Razafimahefa, Raja Vallée-Rai,
Patrick Lam, Etienne Gagnon, and Charles Godin.
Practical Virtual Method Call Resolution for Java.
In 15th Annual ACM Conference on Object-Oriented Programming
Systems, Languages and Applications (OOPSLA 2000), volume 35, pages
264-280. ACM Press, October 2000.
- SLCM99
-
Ulrik Pagh Schultz, Julia L. Lawall, Charles Consel, and Gilles Muller.
Towards Automatic Specialization of Java Programs.
In 13th European Conference on Object-Oriented Programming
(ECOOP'99), volume 1628 of Lecture Notes in Computer Science, pages
367-390. Springer-Verlag, 1999.
- UP87
-
David M. Ungar and David A. Patterson.
What Price Smalltalk ?
IEEE Computer Society, 20(1), January 1987.
- Va01
-
Jan Vitel and al.
The Open Virtual Machine Framework.
https://www.ovmj.org, 2001.
- VRHS+99
-
Raja Vallee-Rai, Laurie Hendren, Vijay Sundaresan, Patrick Lam, Etienne Gagnon,
and Phong Co.
Soot - a Java Optimization Framework.
In CASCON 1999, pages 125-135, 1999.
- ZCC97
-
Olivier Zendra, Dominique Colnet, and Suzanne Collin.
Efficient Dynamic Dispatch without Virtual Function Tables. The
SmallEiffel Compiler.
In 12th Annual ACM Conference on Object-Oriented Programming
Systems, Languages and Applications (OOPSLA'97), volume 32, pages 125-141.
ACM Press, October 1997.
Footnotes
- ... types
- For Virtual
and NoCall, the ``20'' in the name is only kept for consistency with
other benchmark names.
- ...
forever
- ``Forever'' means for example that such a program was
still running after 18 hours, instead of a typical execution
time below one minute.
Paper published in Proceedings of the USENIX 2nd Java Virtual Machine
Research and Technology Symposium, 2002 (JVM '02)
Olivier Zendra
2002-05-28
|
