
| Alma Riska | James Larkby-Lahet | Erik Riedel |
| Seagate Research | Computer Science Dept. | Seagate Research |
| 1251 Waterfront Place | University of Pittsburgh | 1251 Waterfront Place |
| Pittsburgh, PA 15222 | Pittsburgh, PA 15260 | Pittsburgh, PA 15222 |
| Alma.Riska@seagate.com | jamesll@cs.pitt.edu | Erik.Riedel@seagate.com |
Reordering of the IO work is non-work conserving because the overhead of disk head positioning associated with each disk request is different with different request schedules. Hence it becomes critically important to order the same set of requests such that the overall IO work is minimized. Early on, disk scheduling aimed at minimizing the linear disk head movement (i.e., seeks) [3,4,7,20] and later evolved to minimizing the overall head positioning phase of a disk request service [1,10,21]. Request reordering can take place effectively only at certain layers of the IO path, which is commonly composed of a device driver, an array controller, and multiple disks that communicate with each-other through interfaces such as SCSI. For example, seek-based request reordering is traditionally done at the device driver and/or array controller, while position-based request reordering can only be done at the disk level where the accurate information about head's position is available.
In addition to effective reordering of IO requests, IO optimization techniques aim at reducing the number of requests sent down the IO path, by exploiting the temporal and spatial locality in the stream of requests and merging consecutive ones. Request merging enhances IO performance because it reduces the overall head positioning overhead which is associated with each request and it is independent of the request size. Actually, the current default disk scheduler for Linux is Anticipatory [9], which even waits idle, if necessary, to fully explore the sequentiality in the stream of IO requests.
In this paper, we focus on identification of the IO path layers, where specific IO optimization techniques are effective. For this, we conduct measurements in a system whose IO hierarchy consists of the file system, device driver, and the disk itself. Experimenting with an array controller in this path did not indicate qualitatively different results and we opted not to include it in the IO path for the bulk of the experiments. The effectiveness of IO optimization is evaluated at the application level by quantifying the effect that request merging and reordering at different IO layers have on overall system performance.
We find that effective request merging is the key approach to achieve the maximum throughput in the IO subsystem, under heavy load. Although such optimization happens at the device driver level, via scheduling, its effectiveness is determined at the file system level. Specifically, the Reiser file system sends down more requests than all other file systems evaluated, but after merging at the device driver results to the smallest number of disk requests. Consequently, ReiserFS achieves the highest application throughput, which for a specific workload, is double the throughput of other file systems.
Our measurements show that disk level optimization in the form of scheduling is particularly effective and, although, disks are at the end of the IO path, it effects the overall application throughput. Specifically, if the load in the IO subsystem is medium, (i.e., a scenario that diminishes the importance of request merging) then by scheduling effectively at the disk level, one can close the application-level performance gap resulting from ineffective scheduling at the device driver. The effectiveness of disk level scheduling is also noticeable when comparing write-back and write-through disk cache policies. While write-back is better performing with low disk queue depths, write-through gains the performance difference as the disk queue depth is increased, which makes the latter a more attractive alternative given the enhanced data reliability and consistency it provides.
The rest of this paper is organized as follows. In Section 2, we describe the measurement environment. Section 3 explains and evaluates the applications, that we run to generate IO load. We analyze the file system level of the IO path in Section 4 and the device driver level in Section 5. The disk drive level of the IO path is evaluated in Section 6. We discuss related work in Section 7. Section 8 concludes the paper by summarizing our findings.
Our intention is to analyze the effectiveness of IO work optimization throughout the IO path, which (in our case) consists of the file system, the device driver disk scheduler, and a single disk drive. While we did not conduct measurements with multi-disk systems, we measured a system where the disk was attached to an array controller. The presence of an array controller (i.e., more resources and another level of scheduling) did not affect our results qualitatively and is not discussed here in detail for sake of presentation clarity.
We conduct measurements in a system (i.e., Dell Power Edge 1750) that runs the Postmark benchmark [11] on top of a Linux operating systems (i.e., Gentoo Linux 2.6.16-git11 distribution). Postmark is configured for four different scenarios as described in Section 3, that generate IO workloads with different characteristics. Postmark loads the system heavily. Building the Linux kernel multiple times simultaneously serves as our second application which loads the system with a range of load levels.
We also evaluate four file systems, (Ext2, Ext3, ReiserFS, and XFS),
four disk scheduling, (No-Op, Deadline, CFQ, and Anticipatory),
and three different SCSI Seagate disk drives (Cheetah ST318453LC,
ST3146854LC, and ST3300007LC which we refer to as the 18 GB, 146 GB, and
the 300 GB disks, respectively).
Table 1 summarizes the details of our measurement testbed,
while further details for each component, such as the file systems, device
driver schedulers, and disk drives parameters, are given in the corresponding
sections later on.
Unless otherwise stated, the disks in our measurement testbed have
write-through cache enabled.
The blktrace tool that comes with the Linux 2.6 kernel module is used to trace the IO activity at the device driver level. The data obtained is further parsed using blkparse. Tracing using the blk tools captures the entire activity at the IO device driver and includes queuing a request, merging it with an already queued request (if predefined sequentiality criteria holds), dispatching it to the SCSI interface, and handling its completion. In addition to collecting and processing data via the blk tools, we conduct our own data post-processing to identify the work incoming to the device driver from the file system and the work outgoing from the device driver and completed by the disk. In our measurement system, the working set is located in a different disk from the disk that hosts the OS. Also the data collected via blktrace was sent through the network and not stored in the local machine to minimize effects to the targeted SCSI bus.
All our measurements are conducted on clean file systems. We argue that our conclusions hold in the case of an aged file system, because mostly our evaluation is related to the workload characteristics within the working set. Once the working set is stationary over a period of time then optimization depends mostly on the working set size, request interarrival times, and randomness/sequentiality of workloads. With Postmark and Linux kernel builds, we cover a range of workloads with respect to working set size, request interarrival times, and randomness/sequentiality and expect the aged file system behavior to fall in any of the above evaluated categories.
We measure the IO subsystem performance via the application throughput. We chose this measure of interest, because our goal is to evaluate the overall effectiveness of combining various optimization techniques at different levels of the IO path.
Postmark generates an initial working set of random text files ranging in size from a configurable low bound to a configurable high bound. The range of file sizes determines Postmark's workload sequentiality because Postmark's activity in each file is proportional to its size. Postmark's working set is also of configurable size by specifying the number of files in it. Postmark starts with creating the working set (first phase). A number of transactions are executed (second phase). Finally, all files are deleted (third phase). Each Postmark transaction consists of a pair of smaller transactions, which are create file or delete file and read file or append file. Postmark's throughput, used here as a measure of system performance, is the number of transactions per second during the second phase of the benchmark execution, which represents another reason why an aged file system with similar working set and workload characteristics should behave similarly.
|
We benchmark four different Postmark workloads by varying the low and high bounds of file sizes and the number of files in the working set. We aim at having small working sets, i.e., occupying a few percentage of the available disk space and large working sets, i.e., occupying 25% for the largest capacity disk (i.e, the one with 300 GB) to approximately 50% for the smaller capacity disks ((i.e, the 18 GB and the 146 GB ones). The working set size affects the amount of seeking that is associated with each transaction. The working set size is controlled via the number of files.
Although Postmark generates a workload that randomly accesses the files within the working set (see Figure 1), the disk-level randomness depends on the average file size in the working set. We get a more random workload by setting the file size boundaries to be only a few KBytes and a more sequential workload by setting the file size boundaries to a few MBytes. Table 2 describes in detail how Postmark is configured to generate four different workloads. Throughout this paper, Postmark is configured with its buffer parameter set. Exploring the cache impact on IO performance, although important, is not addressed here.
 |
Figure 1 shows the disk access pattern for the LL workload of Table 2, by plotting the start LBA of each request on the y-axis as a function of request arrival time. The other workloads have similar access patterns and are not shown here for sake of brevity.
During the file creation phase, the disk access pattern is mostly sequential, which in the plot appears as straight lines. The sequentiality in this phase is one of the reasons that later on the read and write average request size is (in some cases) larger than the maximum file size in the working set. For the file access phase of the benchmark, the access pattern is random within the working set, which appears in the plots as a block of numerous dots (each marking a single disk request). The SS and LS workloads are localized and entail less disk head positioning overhead than for the SL and LL workloads. The large working sets that span over 50% of the available space (for the 18 GB and 146 GB disks) experience more seeking overhead. Also the sequentiality in workloads increases with the file size in the working set.
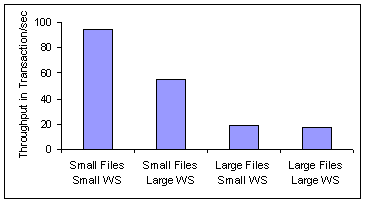
Figure 2 plots the Postmark throughput, measured in transactions per second, during the file access phase of the benchmark, for each of the four workloads of Table 2. The measurement testbed is configured with its default setting, i.e., Ext3 file system, Anticipatory disk scheduling algorithm, and the 18 GB disk drive with a queue depth of 4. The highest Postmark throughput is achieved for the SS workload. This is expected because Postmark's transaction size is linear to the file size. Consequently, workloads with large files have longer transactions than the workloads with small sizes. Transaction length affects Postmark throughput by as much as 5 times (i.e., the difference between throughput under the SS workload and throughput under the LL workload.
 | |||||||||||||||
|
A similar trend is captured also by the IOs per second (IOPS) shown in the table of Figure 2. Again, the SS workload achieves the highest number of disk requests completed in each second. Between the workloads with the same file sizes, the difference in Postmark throughput (and IOPS) is related to the seeking through different file locations. For small working sets the seeking is shorter than for large working sets. The seeking overhead reduces Postmark throughput by as much as 50%. LS and LL workloads perform similarly with regard to Postmark throughput because their sequentiality (lack of randomness) causes the optimization down in the IO path to be similarly (in)effective for both of them. This is not the case for the random SS and SL workloads.
A second application that we use to benchmark the effectiveness of the optimization in the IO path is building multiple Linux kernels simultaneously. The Linux kernel builds yield similar access patterns to the disk as Postmark (when it comes to randomness) but the request interarrival times are longer and the working set spans in bands over some area of the disk. We use this second benchmark to evaluate how effective request merging and reordering becomes at the device driver and the disk drive when the system is loaded moderately.
The throughput of the four different workloads described in Table 2 under the four file systems in our study is shown in Figure 3. The device driver scheduler is Anticipatory, and the queue depth at the 18 GB disk is 4. Under the more sequential workloads, as it is the case of the LS and LL workloads with large files, the difference in Postmark throughput between the four file systems is minimal. They behave very similarly because the sequentiality in the workload provides an almost optimal ordering with little room for further optimization at the file system level. This is not the case for the small files workloads, which have more randomness and consequently more room for optimization. In particular, we observe superior Postmark performance under ReiserFS for the SS workload with as much as twice the throughput of the other file systems.
 |
The work in MBytes of data read and written by Postmark and processed by the file system is presented in Figure 4. In our testbed, we do not have a measurement point in front of the file system to exactly measure the amount of work added to the IO subsystem by the file system itself. The work processed by the Ext2 file system (i.e., no journaling) is the best approximation to the Postmark generated IO workload.
With a few exceptions, there is no substantial difference in the amount of work for either reads or writes. In particular, when comparing the amount of work under the Ext2 file system and the other three file systems that maintain a journal for metadata management. The XFS file system seems to be an outlier when it comes to the extra amount of work to manage the journal under the small files workloads (see the last bar of the first two sets of bars in Figure 4). Because the application (i.e., the scenario under the Ext2 file system) and the file system, approximately request the same amount of work (either reads or writes) to be processed by the storage subsystem, any differences in the overall application throughput (within the same workload) as reported in Figure 3 is attributed to the effectiveness of work optimization in the IO path.
 |
By changing only the file system and fixing the IO workload, disk scheduling, disk queue depth, and other system parameters, the measured difference in application level performance (i.e., Postmark throughput) is attributed to the average disk request size, since we concluded that all file systems process the same amount of work in Figure 4. That is because, for the same amount of data to be transferred, the traffic composed of large disk requests has fewer requests than the traffic composed of small disk requests. Consequently the overhead associated with the disk head positioning is less for the workload composed of large requests than for the workload composed of small requests. Although, small requests get served faster than large requests, in all our measurements, a stream of few large requests always outperformed a stream of many small requests.
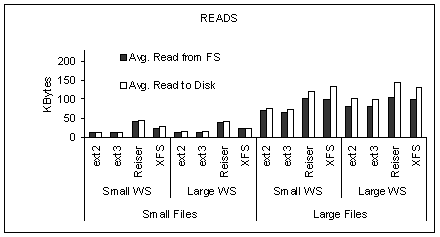
Figure 5 shows the average request size for the four workloads in our evaluation and the four file systems. Request size is measured in the incoming and the outgoing traffic of the device driver which corresponds, respectively, to the outgoing traffic of the file system and the incoming traffic at the disk drive. The scheduler at the device driver is Anticipatory and the disk is the 18 GB one with queue depth of 4. Generally, write disk traffic has longer requests than read disk traffic, in particularly for the workloads with large files. There is noticeable difference between the average disk request size under ReiserFS and the other three file systems. The incoming disk traffic under ReiserFS has the largest read and write request size.
 |
 |
While disk read and write requests under ReiserFS are of comparable size, the read and write requests outgoing from ReiserFS have different sizes. ReiserFS and the other three file systems send down the IO path requests for large reads, while only Ext2 and XFS do the same also for writes. Ext3 and ReiserFS send down the IO path constant size write requests of 4 KB relying on the device driver scheduler to merge the sequential ones. Although, Ext3 and ReiserFS do send down to the device driver, 4 KB write requests, the outgoing write requests are larger for ReiserFS than for Ext3. Overall, ReiserFS is more effective at data allocation.
The same points made in Figure 5, are reinforced with the results presented in Figure 6, where we plot the number of requests in the traffic stream incoming at the disk drive (results are similar for the stream outgoing FS). Note that while ReiserFS results consistently in the smallest number of requests sent to disk, XFS (with the exception of one case) is the second best. This indicates that the constant size write requests sent to the device driver from the file system are not the reason for ReiserFS superiority. Instead, block allocation and maintaining of the journal should be considered as main factors for ReiserFS best performance for the workloads under evaluation. Although the final request merging does happen at the device driver level and, as we discuss it further in the following section, it is a characteristic that sets apart the disk schedulers at the device driver, we stress that it is the data management within the file system level that facilitates the effective outcome of request merging.
 |
Figure 5 indicates that the main differences between the file systems are on handling write traffic rather than read traffic. The latter is mostly handled at or above the file system level (exploiting all the semantics available from the application) and also the system cache availability. Write traffic on the other hand is left to be optimized by the IO subsystem (starting with the file system). Consequently, the impact of write optimization on overall application throughput is high, because Postmark workload is write-dominated.
For the reminder of this paper, we focus mostly on the effectiveness of device driver disk scheduling and disk level queuing. To facilitate a concise presentation, we limit ourselves on measurements in one file system only and we choose ReiserFS because we identified it as the most effective file system when it comes to IO work optimization at the file system level for the workloads under our evaluation.
At the device driver level, request scheduling is the main tool to optimize work. Ordering of requests in the elevator fashion reduces the seek overhead experienced by each request sent down to the disk. Here, we test four different disk scheduling algorithms, which are available in any Linux distribution. Three of the disk scheduling algorithms that we evaluate (namely, Deadline, Anticipatory, and Command Fair Queuing) are elevator-based and the fourth one (i.e., No-Op) is a variation of the First-Come-First-Serve algorithm (as explained below).
Apart from ordering requests, disk scheduling algorithms try to merge consecutive requests so that as few as possible are sent down to the disk. In Section 4, we discussed the importance and the impact of IO request merging on overall system performance. All evaluated disk scheduling algorithms differ in their way they merge requests, and their effectiveness depends on that. In the following, we describe in detail the four evaluated disk scheduling algorithms:
 |
Figure 7 plots Postmark throughput for the four different workloads of Table 2 and the four different device driver scheduling algorithms. The file system is ReiserFS and the disk is the 18 GB one with a queue depth of 4. By fixing all system parameters, such as the file system, disk queue depth, and workload, we attribute the differences in Postmark throughput only to the device driver disk scheduling algorithm. Postmark throughput is clearly higher for scheduling algorithms that reorder the IO traffic based on inter-request seek distances. The differences are more noticeable under more random workloads (i.e., workloads SS and SL) than under more sequential workloads (i.e., workloads LS and LL).
No-Op is in clear disadvantage, with throughput as low as one fourth of the best performing scheduling algorithm (under the SS and LS workloads). As we explained earlier, this is an outcome of the non-work conserving nature of the disk scheduling algorithms where request reordering does result in less work to be done at the disk. In addition, No-Op performs poorly even for the more sequential LL workload, because it merges only consecutive sequential requests. Among the elevator-based disk schedulers, Deadline performs the best in our system, with a noticeable advantage only for the SS workload where randomness is high and working set size small.
Under all scenarios that we measured at the device driver level, the highest relative gain for a disk scheduling algorithm is approximately 20% once all other system parameters remain unchanged (this is for the case of ReiserFS, SS workload and Deadline and Anticipatory schedulers). This gain is much smaller than the case depicted in Figure 3 where the file system rather than the scheduling algorithm is the changing system parameter and the performance gains is as much as 80% for ReiserFS when compared with XFS under the SS workload.
 |  |
Disk scheduling algorithms, including No-Op, merge incoming file system requests to exploit their temporal and spatial locality. Anticipatory scheduling is the most aggressive algorithm with respect to merging, because it waits up to 3 ms (in our configuration) for new read arrivals that could be merged with outstanding ones, even though the storage system might be idle. No-Op scheduling is the least efficient algorithm because it merges only consecutive requests that are sequentially located on the disk. Deadline and CFQ do not put conditions on consecutive arrivals of sequential requests as No-Op does.
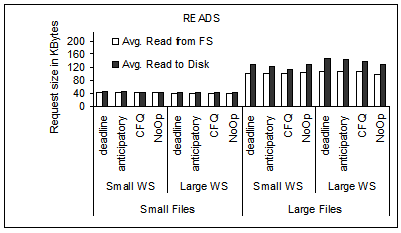
Differences in disk scheduling algorithms with respect to request merging are depicted in Figure 8, where we plot the average request size for the read and write traffic in and out of the device driver for the four workloads of Table 2 under the four different disk scheduling algorithms. The file system is ReiserFS and the disk is the 18 GB one with a queue depth of 4. There is a substantial difference between No-Op write request size out of the device driver and other schedulers write request size out of the device driver. No-Op does not succeed to merge any write requests at all because their sequentiality is broken by other IO requests. In particular, under ReiserFS, which we plot in Figure 8, No-Op is under disadvantage because the file system chops application write requests to 4 KB. All other disk scheduling algorithms perform comparably, because the high IO load with short interarrival times causes these scheduling algorithms to meet their parameter thresholds for request merging. Generally, device driver disk scheduling merges more effectively writes than reads for the Postmark workloads evaluated here.
 |
The same conclusion is drawn from the results presented in Figure 9, where we plot the number of requests in and out the device driver level for each scheduler and the four workloads of Table 2. For the workloads that access large files (i.e., LS and LL) the degree of merging is higher than for workloads that access small files (i.e., SS and SL), because the workload is sequential and, on its own, represents more opportunities for request merging.
 |
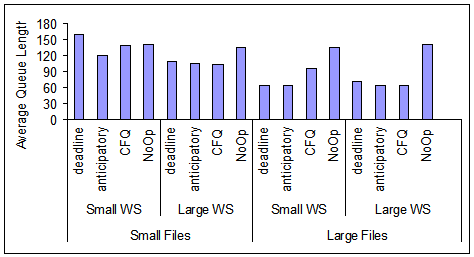 |
In Figure 10, we show the average response time and queue length at the device driver level for the four workloads of Table 2, the four disk scheduling algorithms, ReiserFS, and the 18 GB disk with queue depth of 4. The results of Figure 10 clearly indicate that the device driver operates under very high load with queue lengths in the hundred and response times in the level of seconds. Request response time under No-Op is better than under the other scheduling algorithms because the requests and, consequently, the disk transfer times are shorter under No-Op than under the other disk scheduling algorithms (see Figure 8). The difference is reflected in overall average request response time.
 |
 |
We also plot the cumulative distribution function of response times at the device driver and at the disk for only one workload (i.e., SS) and the four scheduling algorithms.in Figure 11 Indeed the disk scheduling algorithms other than No-Op do introduce more variability in the system as the distribution at the device driver indicates. However this variability does not affect the overall system performance since under these scheduling algorithms the application throughput is noticeably better than under the fair No-Op scheduler. The variability injected in the workload because of scheduling at the device driver level, does not get more pronounced at the disk level as the distribution of disk response time indicate. The difference between the four device driver schedulers in the disk response time distribution is attributed to the difference in request size between No-Op and the other three disk schedulers.
Linux kernel compilation generates a write-dominated random workload. Different builds were placed in different disk partitions which means that disk head positioning is involved when multiple simultaneous builds are running. Because the average request size is different for the Linux build measurements and the Postmark ones, we compare the load level by looking at the request interarrival times. While for Postmark the average interarrival time is 3 ms, for the Linux build is 19 ms and 12 ms for the two and four simultaneous builds.
Figure 12 shows the throughput of this benchmark measured in builds per second. Note that the differences between the disk scheduling algorithms at the device driver level are not as pronounced as in the case of the heavy Postmark load. Even No-Op is not far behind the seek-based scheduling algorithms. In the next section, we come back to the Linux kernel build benchmark and discuss the effectiveness of disk level request scheduling under medium IO load, where request merging has smaller effect on IO optimization than under the Postmark benchmark. Under the Linux build benchmark, request reordering is of more importance than request merging.
We use three different disks in our evaluation manufactured by Seagate
Technology. The main differences between them are the linear density,
rotational speed, and capacity, which determine the average head
positioning time and the associated overhead for each disk request.
Details on the three disks used in our evaluation are given in
Table 3. Note that the linear density of the
300 GB disk is approximately 24% and 64% higher than the linear
density of the 146 GB disk and the 18 GB disk, respectively, while
its average seek time is higher by approximately 30%.
Although seek time is expected to improve if disk tracks are closer
together, in the case of the 300 GB drive, the platters are larger to
accommodate the large capacity and consequently the arm itself becomes
heavier, which results in longer seek times for the 300 GB disk
than the 18 GB and 146 GB disks.
|
In Figure 13, we show the Postmark throughput for the three disks of Table 3 and the SS and LL workloads of Table 2. The file system is changed while the disk scheduling is set to Anticipatory. The highest application throughput is achieved for the 146 GB disk, with the 18 GB to a close second. The higher average seek times and the slower rotation speed cause the 300 GB disk drive, although with the highest linear density, to achieve the lowest application throughput among the three disk drives.
 |
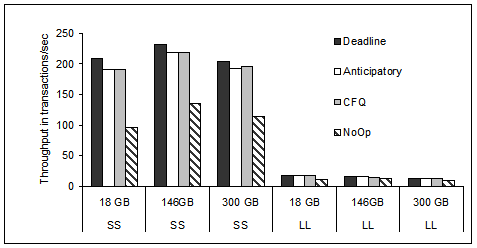
Figure 14 is similar to Figure 13, but now the file system is fixed to ReiserFS and the Postmark performance is measured under four disk scheduling algorithms. As pointed out above, the 146 GB disk is the one performing best under all device driver disk scheduling algorithms. Note that the relative gap between No-Op and the other seek-based algorithms is smaller for the newer disks (i.e., 146 GB and 300 GB) than the older one (i.e., 18 GB).
 |
As we mentioned previously, disk request scheduling is non-work conserving and the optimal algorithm, which is also NP-complete, uses the positioning time rather than the seek time per request, when it comes to compute the optimal schedule [1]. Disk head positioning time is only accurately predicted at the disk drive itself, rather than any other level of the IO path. This is because the SCSI interface does not support sharing such information and because disks conduct various internal background activities to enhance their performance and reliability. Consequently, predicting disk head position at the device driver level is difficult, although, various efforts have been made to enhance disk scheduling at the device driver beyond the seek-based schedulers [5,16].
Computing the optimal schedule is computationally expensive and impractical. Consequently, newer disks with more CPU and memory resources than before can easily accommodate long queue depths at the disk level and exploit almost all the performance enhancement available via disk level request reordering based on advanced heuristics rather than the optimal scheduling. The queuing buffer of the disks of Table 3 can hold up to 64 outstanding requests and they implement variants of the Shortest Positioning Time First algorithms [27].
The queue depth at the disk drive level is a parameter set at the device driver and often set to 4 (the default value for many SCSI device drivers). The queue depth at the disk is commonly kept low to avoid request starvation, because disk drive scheduling introduces variability in request response time, which can be controlled easily by the operating system at the device driver with algorithms such as Deadline but not at the disk drive level.
Here, we set the disk queue depth beyond the default 4 to evaluate the overall system benefits by queuing more at the disk drive level. To ease our presentation, we use only the 18 GB and the 300 GB disks from Table 3. The rest of the system configuration is: ReiserFS and the SS workload from Table 2. We use these settings because they represent the case with the most efficient and pronounced optimization (among all cases evaluated in the previous sections). We plot the measured Postmark throughput in Figure 15. The plot shows that, although the disk is the lowest component in the IO path, by only increasing the disk queue depth, we improve overall application performance and throughput.
 |
The relative gain of deeper queues at the disk in Figure 15, is more pronounced for the newer 300 GB disk than the older 18 GB one. Actually for the best performing device driver scheduling algorithm (i.e., Deadline), the throughput of the 300 GB disk which we showed in Figures 14 and 13 to be lower than that of the other disks for the same workload, is very close to the throughput of the 18 GB disk.
The cache at the disk, as anywhere else in the system, is an important resource that aids performance enhancement in the IO path. While evaluation of disk cache effectiveness is outside the scope of our analysis, in this section, we evaluate the relation between the effectiveness of disk level queuing and two different policies for using the available cache by the incoming write traffic, specifically, the ``write-back'' and the ``write-through'' polices.
The write-back policy is proposed to further enhance performance at the disk drive level. Under the write-back policy, once a write request has arrived at the disk cache, the host is notified for its completion. From the host perspective the write service time is equal to the disk cache hit time rather than the time to actually completely store the write on the disk media. The drawback of this policy is that it might lead to inconsistencies during system crashes or failures, because the data is not permanently stored while it appears so for the host system. Disk write-back policy is the default one for all the SATA drives, which are installed in systems with moderate reliability requirements. Interestingly enough, even the newer SCSI Seagate disks (i.e., the 146 GB and the 300 GB ones) came with the write cache enabled. It is true that if non-volatile memory is available in the IO path, then inconsistencies because of data loss during crashes are reduced. As such ``write-back'' is the default policy for disk drives.
The other option is to write the data through on the disk and notify the host that a write is completed only when the data is actually stored safely on the disk media. This means that read and write traffic are handled similarly and for almost all writes the disk service time is not going to be the disk cache-hit time anymore. This policy is called ``write-though'' and provides high levels of data reliability and consistency. Disk level performance under the ``write-through'' policy is worse than under the ``write-back'' policy, which explains why the former is used only in systems with the highest level of data reliability and consistency requirements. All our previous results in this paper are generated with ``write-through'' disk caches.
In this subsection, we evaluate the system and application behavior when the only parameter that changes in our testbed is the disk queue depth while we set the file system to be ReiserFS and run the SS workload. We also set the disk cache to be ``write-back''. We conduct measurements for all four device driver schedulers in our evaluation.
We present Postmark throughput in Figure 16. Without disk-level queuing (i.e., queue depth of one) Postmark achieves the highest (or very close to it) throughput possible for the configuration. Additional queuing at the disk, commonly results in performance degradation. In particular, this is the case when the device driver scheduler, such as No-Op, is not effective on IO request ordering and merging.
The adversary affect of disk level queuing on overall system performance when ``write-back'' is enabled is related to the limited queueing buffer space at the disk. If write cache is enabled, the effective disk queue is longer than what disk advertises at the device driver. Hence, under heavy loads, as it is the case for Postmark, the actual disk queue reaches the physical maximum allowable queue of 64 for the disks under our evaluation. If the buffer queue at the disk is full, the disk responds to the host with a ``disk full'' message, which indicates that it can not accept more requests. Consequently, the device driver delays the requests longer and because the IO subsystem does operate as a closed system, these delays propagate and affect overall system performance, i.e., the system slows down. As it can be seen from Figure 16, the negative disk queuing effect is not consistent. Specifically, the minimum throughput is often at queue depth of 4 and not at the higher queue depth of 16.
 |
Comparing results in Figure 15 with results in Figure 16, we observe that if the disk ``write-through'' policy is enabled as well as the queue depth is set to a high value, then highest Postmark throughput achieved under ``write-through'' and ``write-back'' policies are very close. This means that the level of optimization offered in the IO path, in particular disk level queuing, is as effective as to close the performance gap between the disk ``write-through'' and ``write-back'' policies. We conclude this subsection, by stressing that deep disk queues and ``write-through'' policy not only achieve application-level throughput as high as under the performance-enhancer ``write-back'' policy, but enhance the always needed data consistency and reliability.
As we discussed in more length in Subsection 5.1, Postmark load is high and we choose to benchmark also a case of medium load in the system by compiling simultaneously two and four Linux kernels. Under high load, as it is the case of Postmark, IO requests wait mostly at the device driver, because the number of outstanding IO requests is higher than the maximum disk queue depth. Hence disk level queuing is effective only for a small portion of the outstanding IO requests and optimization effectiveness at the device driver becomes more important than queuing at the disk drive level.
Under medium loads, as it is the case of the Linux kernel compilation, which we described in Subsection 5.1, the impact of disk queuing in the overall system performance is higher than under high loads. This holds in particular for cases when the optimization at the device driver level (or any other level in the IO path) is not as effective as it could be (as it is the case of the No-Op scheduler).
In Figure 17, we show the effectiveness of disk queuing when compiling 2 and 4 Linux kernels simultaneously. Note that No-Op benefits the most from disk queuing and the result is that the overall system performance (measured in builds per seconds) is very close for all four device driver disk schedulers when disk queue depth is 16 or higher. Hence, we conclude that disk level queuing and scheduling is effective and does close any performance gaps in the IO request reordering from the higher levels in the IO path.
 |
Because the performance gap between memory and disk drives has remained significant, even with the latest advances in technology, optimizing performance in the IO path has been the focus of work for many researchers. In addition to adding resources such as caches [2] in the IO path and managing them more efficiently [14], optimization of the IO activity itself is one of the main tools to enhance IO performance. IO workload optimization consists mostly of request merging and request reordering at various levels of the IO hierarchy, such as the file system, the device driver, and the disk drive.
IO work reordering via scheduling early on aimed at minimizing the linear disk head movement (i.e., seeks) [3,4,7,20] and later evolved to minimizing the overall head position phase [1,10,21] of a disk request service. Because IO request reordering introduces variability in request response time, multiple variations are proposed to mitigate the problem [27]. On the analytic side, there are studies that compare analytically disk scheduling algorithms [25] and derive empirical models of disk access patterns to facilitate such comparison [26].
Recent advances in disk scheduling include speculative waiting to better exploit temporal and spatial locality of IO requests [9], predicting disk service times [16] and disk head position [5] to enhance performance of seek-based schedulers at the device driver, increasing disk head utilization by reading ``for free'' data on the path of the disk head movement [13], and other hierarchical approaches [22], which are mostly used for performance virtualization in large systems [12].
Performance optimization at the disk drive level is mostly related to request scheduling and evaluated in association with it [27]. IO performance improvement is also evaluated in association with workload characterization studies [19]. Performance enhancement related to advancements in disk technology, including areal density and rotational speed is discussed in [15]..
While most request reordering happens either at the device driver or at the disk, file systems also represent a critical component of the IO path capable of effective IO work optimization. The main research efforts when it comes to enhancing file systems, are related with improving data reliability and consistency [17,23]. However considerable work is done to enhance file system performance as well. For example scalability of the XFS file system is discussed in [24] and file system workload characteristics are analyzed in [6,8]. A comparative study between file systems is presented in [18].
Apart from the existing work, our paper analyzes advances in the IO path, and evaluates how effectively they integrally optimize and enhance IO performance. Most works evaluate the components of the IO path individually, while in this paper, we analyze their impact in overall application performance. Our goal is to first identify the reasons why some components in the IO path are more effective than others in optimizing the IO workload and secondly understand if and how such optimization can be as effective in other tiers as well with the goal to further enhance IO subsystem performance.
Our measurements showed that request merging is critical for reducing the number of disk requests and enhancing overall performance. Although, request merging takes place at the device driver scheduler, it is the block allocation and data management at the file system itself that determines the effectiveness of the request merging process. The most effective file system in our measurements was ReiserFS which improved by as high as 100% application-level throughput.
Under medium load though, request merging becomes less efficient and request reordering becomes the tool to optimize the IO traffic. Request reordering at the device driver level improved application-level throughput by as much as 20% application-level throughput under the Deadline device driver scheduler.
Disk drives have become very effective on optimizing request reordering, closing any performance gaps between the elevator-based and FCFS device driver schedulers. Increasing the queue depth at the disk drive under the write-through cache policy, improves the overall application throughput with as much as 30% if the device driver scheduler is seek-based and more than 6 times if the device driver scheduler is FCFS (No-Op). On the contrary, under heavy load, disk queuing has a negative impact on application throughput when the write-back cache policy is enabled. Overall, combining the write-through disk cache policy and high queue depths performs similarly with the write-back disk cache policy and it is attractive because it does not compromise data reliability and consistency, as the write-back cache policy does.
This document was generated using the LaTeX2HTML translator Version 2002-2-1 (1.71)
Copyright © 1993, 1994, 1995, 1996,
Nikos Drakos,
Computer Based Learning Unit, University of Leeds.
Copyright © 1997, 1998, 1999,
Ross Moore,
Mathematics Department, Macquarie University, Sydney.
The command line arguments were:
latex2html -split 0 -show_section_numbers -local_icons main.tex
The translation was initiated by Alma Riska on 2007-04-25
