Towards a Resilient Operating System for Wireless
Sensor Networks
Hyoseung Kim and
Hojung Cha
Department
of Computer Science, Yonsei University
Seodaemun-gu,
Shinchon-dong 134, Seoul 120-749, Korea
{hskim,
hjcha}@cs.yonsei.ac.kr
Abstract
Active research
has recently been conducted on large scale wireless sensor networks, especially
network management and maintenance, but the technique for managing application
errors on MMU-less sensor node devices has not been seriously considered. This
paper presents a resilient operating system mechanism for wireless sensor
networks. The proposed mechanism separates the kernel from the user execution
area via dual mode operation, and the access violation of applications is
controlled by static/dynamic code checking. The experiment results on a common
sensor node show that the proposed mechanisms effectively protect the system
from errant applications.
1. Introduction
Wireless sensor networks normally consist of battery- operated,
memory-limited and low performance node devices. Although the research on radio
communication techniques and system software developments for resource
constraint devices has recently been active [1][2], little effort has been
expended on the reliability issue on sensor network systems running on MMU-less
devices. Application errors on sensor nodes can affect the entire system, and
the current system is ignorant of problems caused by application faults, such
as immediate hardware control, kernel code execution, and kernel data
corruption, so the system may collect incorrect data, or reduce the node
availability. As we cannot write safe applications all the time and sensor node
hardware does not easily detect application errors, techniques to ensure system
resilience at the operating system level should be developed.
Currently available
operating systems for wireless sensor networks include TinyOS [3], MANTIS [4],
and SOS [5]. The component-based and event-driven TinyOS produces a single code
image where the kernel and application are statically linked. There is no
distinction between kernel and application, so a badly written application can
cause the system to fail [6]. MANTIS provides a multithreaded programming
model, but it is not free from the possibility of user errors due to a
statically linked image, as is the case of TinyOS. SOS separates the kernel and
application modules via dynamically loadable modules. This technique, however,
does not include measures to restrict the application from accessing kernel
data or other application data, and calling kernel code abnormally. Concerning
the system errors, some operating systems use a watchdog timer, but it is not
easy to recognize and handle problems such as memory access beyond the
application area, immediate hardware control, and error repetition. Users have
to reset sensor nodes directly to recover from specific errors [7]. Meanwhile,
Maté [6] is a virtual machine for wireless sensor networks. The interpreter in
the virtual machine enables the detection of hazardous instructions in the
runtime, but there are also limitations, such as performance degradation or
additional efforts to learn new programming languages for the virtual machine
[5].
The operating
system mechanism for error-free wireless sensor networks should operate with
software assistance. The mechanism ought to protect the kernel from
applications and support diverse applications in a multithreaded environment.
However, previous work on the software approach to ensure system safety has
typically focused on the MMU-equipped general purpose systems, and on the
single-threaded model. SFI (Software Fault Isolation) [8] modifies the data
access via indirect addressing or jump instructions to be executed in a single
allocated segment, which requires MMU. SFI was designed for RISC architectures
that have fixed-length instructions. [12] suggests that SFI can cause illegal
jump operations when it is implemented on variable-length instruction
architecture, which are usually adopted in sensor node platforms.
Proof-carrying Code [9] evaluates the application using a safety policy in
compile time. However, as the automatic policy generator does not exist, the
technique cannot be applied directly to real systems. Programming language
approaches include Cyclone [10], Control-C [11], and Cuckoo [12]. All of these
are based on the C programming language, but users should be aware of the
different usages of pointers and arrays. Cyclone requires hardware supports for
stack safety; Control-C aims to offer system safety without runtime checking,
although additional hardware is required for stack safety and the language does
not guarantee fault-free array indexing; Cuckoo provides system safety without
hardware supports. The overhead of Cuckoo is, however, not trivial – being
almost double the size of the optimized GCC execution time.
This paper presents
a resilient operating system mechanism for wireless sensor networks. The
proposed mechanism is designed to apply to the common sensor node platform with
RETOS, the preemptively multi-threaded operating system we are currently
developing, and enables sensor node systems to run safely from errant
applications without hardware supports. The mechanism implemented in the RETOS
kernel detects harmful attempts on system safety by applications, and
terminates the badly-written application programs appropriately. The
effectiveness of the proposed mechanism is validated by experiments conducted
on a commercial sensor node device running the RETOS operating system.
The rest of this
paper is organized as follows: Section 2 describes background on the system
software and the hardware platform used in the paper; Section 3 explains the proposed
safety mechanism; Section 4 validates the effectiveness of the mechanism via
real experiments; and Section 5 concludes the paper.
2. RETOS
Architecture
The proposed safety mechanism is based on the RETOS operating system.
Figure 1 illustrates the system organization. RETOS provides preemptive
multithreading based on a dual mode operation that cooperates with
static/dynamic code checking to protect the system from application errors.
(Dual mode operation normally refers to running with two hardware privilege
levels, but in this paper, we use the terminology as the kernel/user separated
operation.) To elevate the memory efficiency of dual mode operation, a single
kernel stack is maintained in the RETOS kernel. This technique restricts thread
preemption to be performed in user mode, but the amount of required system
memory is decreased. With the thread preemption, hardware contexts are saved in
each thread's TCB (Thread Control Block) due to kernel stack sharing. The
mechanism for ensuring system safety with dual mode operation and
static/dynamic code checking is described in Section 3 in detail.
RETOS supports the POSIX 1003.1b real-time scheduling interface.
Threads are scheduled by three scheduling policies: SCHED_RR, SCHED_FIFO, and
SCHED_OTHER. Thread scheduling is done in kernel level, while synchronization
methods reside in user level. When synchronization primitives like mutex
are executed, the thread library disables interrupts in user level and tries to
acquire the resource. On an unsuccessful case, the library inserts the thread
information to the resource waiting list and blocks the thread. After the
resource is unlocked, the library sequentially wakes up the threads in the
waiting list.
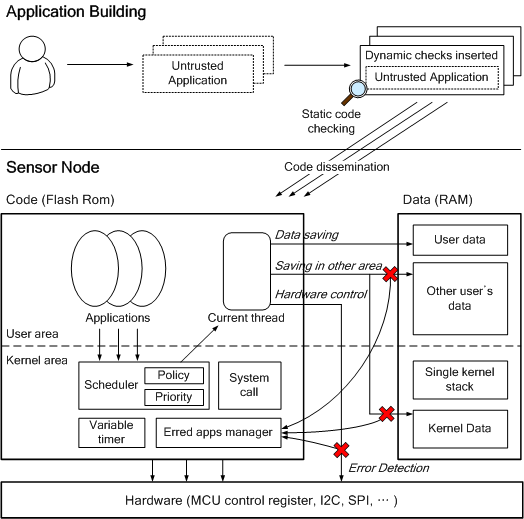
Figure 1. RETOS
System Overview
In the RETOS
system, applications are separated from the kernel code, and several
applications can be loaded and executed dynamically. To exploit runtime
application loading in a single address space, the address relocation technique
is employed. The method produces an address relocation table during the compile
time, and relocates the addresses of the binary to the ROM/RAM address, which
is allocated for the application. The memory manager for the data/stack area
management of loadable applications is based on first-fit allocation. Dynamic
memory allocation is currently available only for the kernel codes.
RETOS is being
implemented on the Tmote Sky [13]. The mote is based on the TI MSP430 F1611
(8Mhz, 10Kb internal RAM, 48Kb internal Flash) microcontroller, and the
Chipcon 2420 RF module. The MSP430 instruction set consists of core
instructions and emulated instructions. There are three types of core
instructions: dual-operand, single-operand, and jump. Users program sensor
applications with the standard C and the Pthread library.
3. Ensuring
System Safety
The proposed mechanism ensures system resilience via dual mode
operation and application code checking. Since general microcontrollers such as
MSP430 only have a single address space, the kernel and applications exist in
the same address space. Dual mode operation logically separates the kernel and
the user execution area. Mote devices cannot protect applications' address
spaces or keep the hardware resources controlled. Application code checking
which consists of both static and dynamic techniques solves the problem. The
concept of the safe operating system mechanism proposed in the paper is
summarized in Figure 1. User applications become trusted code through
static/dynamic code checking. Applications loaded on the system are allowed to
store data and to execute codes in their own resources, but application errors
that were not detected at the compile time are reported to the kernel. When the
errors are reported, the kernel informs users of the illegal instruction
address and safely terminates the program.
3.1. Dual Mode
Operation
Dual mode separates the kernel from the user execution area to perform
application code checking in the target operating system, RETOS. Since the
static/dynamic code checking evaluates if the application modifies data or
issues codes in its allocated area, preemption in the system which executes
kernel and user code in the same stack would invoke problems. For example, a
thread which has access rights to other threads in a common application group
would destroy the stored kernel data, such as a return address and hardware
contexts, in the blocked thread stacks.

Figure 2. Dual
Mode Operation
In the proposed
mechanism, dual mode is operated by stack switching. Applications in the user
mode use the user stack, and the stack is changed to the kernel stack for
system calls and interrupts handling. Figure 2 shows the dual mode operation
for system call handling on the proposed system. System calls are implemented
by a function call on the TI MSP430 microcontroller, so the return address
remains in the user stack, thereby leaving it to be modified by other threads.
Upon system call, the current stack pointer indicating the user stack and the
return address are stored in the PCB, and the runtime stack is changed to the
kernel stack. Therefore, the return address validation is necessary before
returning to the user mode. The case of interrupt handling is similar to the
one illustrated in Figure 2. When an interrupt is invoked, MSP430 pushes the
program counter in the current stack and jumps to the corresponding interrupt
handler. The handler function switches to the kernel stack, if the system was
in the user mode, and checks the return address after processing.
Dual mode may incur
memory overhead on resource-constraint sensor nodes due to the per-thread
kernel stack. To save memory usage, the proposed mechanism maintains a single
kernel stack in the system. Kernel stack sharing means that the system cannot
arbitrarily interleave execution flow, including thread preemption, while they
are in the kernel mode. Instead, the kernel provides the deferred invocation.
System calls, such as radio communication, register their long-running tasks
to be executed later and return as soon as possible. Thread switching is
performed right before returning to user mode, that is, the
time when all work pushed on the
kernel stack is finished. Although the single kernel stack is unable to preempt
threads in the kernel mode, it enables the memory efficient implementation of
dual mode operation in the soft real-time system, where the preemptive kernel
is not strongly required. In addition to memory overhead, mode switching
overhead is found in interrupts and system calls handling. Section 4 evaluates
such overhead.
3.2.
Static/Dynamic Code Checking
Static/dynamic code checking sets restrictions on an application for
using data and the code area within the application itself, and restricts
direct hardware resource manipulation. The proposed technique inspects the
destination field of machine instructions. The destination address evaluation
prevents the application from writing or jumping to an address outside its
logically separated portion. The destination field is observed if it is a
hardware control register, such as the MCU status control register. The source
field of instructions can also be examined to prevent the application from
reading kernel or other applications data. We, however, do not adopt the
mechanism because of the security issues as well as computation overhead. The
code checking technique considers non-operand instructions such as ret
and eint/dint. This technique evaluates a return address of
function for ret, and looks up eint/dint to disallow
immediate hardware control.

Figure 3. Application Building Sequence
The technique
consists of static and dynamic code checking. Direct/immediate addressing
instructions, pc-relative jumps and eint/dint are verified during
the compile time. As we assume the library codes are safe, the libraries are
not checked in our implementation. Indirect addressing instructions are
verified in runtime due to unpredictable destination addresses. Runtime
checking is required of the ret instruction, because the return address
can be affected by buffer overrun. Figure 3 shows the application building
sequence, including static/dynamic code checking. Every source code of the
application is compiled to assembly code; then checking code is inserted to the
place where the dynamic code checking is required. After
dynamic code insertion, a binary image is created via
compiling and linking, and the static code checking is then performed on the
binary.

Figure 4. Dynamic
Code Checking
Figure 4 is the
example of dynamic code checking for TI MSP430. Since the technique for
indirect calls inspects the destination address using the application's
function table, it makes the instruction unable to branch directly to a
hazardous instruction by passing the inserted checking code or to the midst of
the instruction. Here, an application binary should include its function table
in the header, and the kernel should provide a variable to save the address of
the current application's function table and update it at the thread
scheduling. The technique for call/push instructions does not consider stack
overflow because the stack usage verification is conducted at the function
prologue by way of the stack depth count in the function. The indirect store
instruction is examined similarly as shown in Figure 4. The difference is to
check every dynamically allocated RAM area for threads in the application using
the linked list. Note that the r4 register shown in the
Figure 4 checking code is configured to not
be used by the MSP430-GCC.

Figure 5. Static
Code Checking
Figure 5 shows an example of static code checking. This technique
identifies the existence of the destination address in the relocation table,
which has all the symbol information in the source code, and the offsets of
those instructions referring to the symbols. If the address is not in the
relocation table, the instruction will be confirmed as incorrect. For instance,
the destination address of the instruction call 0x1254 in Figure 5 exists in
the relocation table, and its offset is identical to the one in the table. In
addition, the technique estimates the destination address within a dedicated
area because data and code size is limited in the mote system. The address
0x1254 in the figure is between the application start address 0x1100 and the
end address 0x13a8. Hence, the instruction call 0x1254 is proved correct. The mov
instruction in the figure is also checked to be correct by the same method.
4. Evaluation
This section describes the experiment results of the proposed resilient
operating system mechanism, and analyzes its performance characteristics. Both
the mechanism and RETOS have been implemented for the TI MSP430 F1611 (8Mhz,
10Kb RAM, 48Kb Flash) based Tmote Sky hardware platform.
4.1.
Functionality Test
|
|
Test Set
|
|
Stack safety
|
- General/Mutual recursive call
void foo() { foo(); }
|
|
Data safety
|
- Directly addressed pointer
int *tmp = 0x400; *tmp = 1;
- Array indexing
int array[10]; /* array in heap area */
for(i = 10; I > 0; i--) array[i-100] = i;
|
|
Code safety
|
- Directly addressed function pointer
void (*func)(void) = 0x1000; func();
- Buffer overrun (damaging return address)
void func() { int array[5], i;
for(i = 0; i < 10; i++) array[i] = 0; }
|
|
Hardware safety
|
- Disable interrupt
asm volatile ("dint");
- Flash rom writing (memory mapped
regs.)
FCTL1 = FWKEY+WRT;
|
Table 1. Example Codes for Functionality Test
To adequately evaluate the error management of the proposed mechanism,
we classify the safety domain of applications into four parts: stack, data,
code and hardware. Stack safety means the prevention of stack overflow due to
function calls and local variable handling. Data safety implies the protection
of the kernel and other applications data against illegal access, and code
safety restricts the execution of the kernel and other applications code.
Hardware safety implies whether the system can be protected from immediate
hardware control. Table 1 shows the examples of the codes for each safety
domain. A recursive call verifies the stack safety of the proposed mechanism.
Modifying data outside the application's area, by using a directly addressed
pointer and deviated array indexing, is done to analyze data safety. A directly
addressed function call and a corrupted return address due to buffer overflow
are used to test code safety. An interrupt disabling code and a Flash ROM
writing code are used for the hardware safety check.
Following the functionality tests, the proposed
mechanism is proved to ensure system resilience against hazardous application
codes. An application, including a recursive call, an illegal array indexing,
and a buffer overflow, is reported to the kernel by dynamic code checking
and is terminated safely. The static check detects storing
at and calling the address outside the application, which are caused by
directly addressed pointers, interrupt disabling and Flash ROM writing. In
order to compare the existing sensor network operating systems, that provide no
safety mechanism, TinyOS v1.1.13
is selected to execute the application code in Table 1. The application using
the directly addressed pointer and deviated array indexing does not perform
well. The codes for recursive call, directly addressed function pointer, buffer
overflow, interrupt disabling and the Flash ROM writing crash the system. The
watchdog timer reboots the system sometimes, but the system is not restored
most of the time.
4.2. Overhead
Analysis
The proposed mechanism may have some overhead due to dual mode
operation and dynamic code checking. The first set of experiments aims to
analyze the performance of dual mode operation. We have implemented two
versions of RETOS, dual mode and single mode, to measure performance
degradation from mode switching and the return address check. Table 2 shows the
results.
|
|
Single mode
|
Dual mode
|
|
system call (led toggle)
|
264
|
302
|
|
system call (radio packet send)
|
352
|
384
|
|
timer interrupt (invoked in kernel)
|
728
|
728
|
|
timer interrupt (invoked in user)
|
760
|
Table 2. Dual Mode Overhead (cycle)
The experiment data shown in Table 2 denotes approximately 32~38 cycles
of computational overhead for system calls, toggle a led and send a radio
packet, and dual mode operation. At the timer interrupt handling, however,
operation time differs from the interrupt that occurred in kernel mode and user
mode. As the stack is not changed and the return address checking is omitted in
kernel mode, the result of handling the timer interrupt invoked in
kernel mode on the dual mode system
is identical with the result on single mode.
The overhead of the timer interrupt invoked in user mode on the dual mode
system is 32 cycles, which is similar to the case of system calls.
The second set of experiments was conducted to observe
the execution time overhead of dynamic code checking. We compare the
codes with dynamic checks to original applications running RETOS by calculating
average instruction cycles per second during 10 minutes. To measure the
overhead of inserted codes, we consider the execution time running in user
mode. Seven sensor network applications are used for the test. MPT_mobile
and MPT_backbone are decentralized multiple object tracking programs
[14]. When MPT_mobile node moves around, it sends both an ultrasound
signal and a beacon messages every 300ms to nearby MPT_backbone nodes. MPT_backbone
nodes report their distance to the mobile node, and MPT_mobile computes
its location using trilateration. R_send and R_recv are programs
to send and receive radio packets with reliability. Sensing samples the
data and forwards it to the neighbor node. Pingpong makes two nodes
blink in turns by means of the counter exchange. Surge is a multihop
data collecting application which manages a neighbor table and routes the
packet.
|
|
No check
|
Dynamic check
|
Overhead(%)
|
|
MPT_backbone
|
40326
|
40508
|
0.5
|
|
MPT_mobile
|
386566
|
394624
|
2.1
|
|
R_send
|
24815
|
26176
|
5.5
|
|
R_recv
|
4704
|
5010
|
6.5
|
|
Sensing
|
1056
|
1096
|
3.8
|
|
Pingpong
|
1243
|
1347
|
8.4
|
|
Surge
|
58723
|
62688
|
6.7
|
Table 3. Dynamic Code Checking Overhead (cycle)
|
|
No check
|
Dynamic check
|
Overhead(%)
|
|
MPT_backbone
|
614
|
682
|
11.1
|
|
MPT_mobile
|
8726
|
10046
|
15.1
|
|
R_send
|
946
|
1014
|
7.2
|
|
R_recv
|
902
|
1004
|
11.3
|
|
Sensing
|
774
|
835
|
7.9
|
|
Pingpong
|
478
|
510
|
6.7
|
|
Surge
|
1436
|
1610
|
12.1
|
Table 4. Application Code Size Comparison (bytes)
Table 3 shows that
applications using dynamic code checking have 0.5~8.4% performance degradation.
MPT_mobile, which requires the longest processing time, generated 2%
more overhead when the protection mechanism was used; the amount of calculation
time caused by non-hardware multiplier is much larger than dynamic checking.
Whereas, R_recv, Pingpong, and Surge, all of which require more
memory access than complex arithmetic calculations, shows larger overhead.
Since the dynamic code checking requires code insertion, the technique
increases the application code size when compared to the original one. Table 4
shows the code size comparison. The increases are 4~12%. However, the
application is inherently small, being separated from kernel, and hence code
size increases are not considerable for the internal Flash ROM of TI MSP430 or
AVR ATmega128L, the common microcontrollers used for sensor node devices.
The performance of
dual mode operation, the computational overhead and code size increment of
dynamic code checking are analyzed. Since the system stays idle most of the
time due to sensor network application characteristics, energy consumption for
the proposed mechanism may be almost the same as existing systems. The overhead
of dynamic code checking, however, heavily depends upon application types and
the programmers' coding style. Generally, frequent usages of local variables,
function calls, and pointers cause more overhead.
5. Conclusion
In this paper, we presented a resilient operating system mechanism for
wireless sensor networks, based on dual mode operation and static/dynamic code
checking. The proposed mechanism guarantees stack, data, code and hardware
safety on MMU-less hardware without restriction of the standard C language.
Dynamic code checking with dual mode operation is reported in approximately 8%
of execution time overhead on the TI MSP430 processor.
The experiments were conducted under the assumption that
the libraries always operate safely, and the code checking techniques do not
inspect library codes. In real situations, however, if a user passes an invalid
address to memcpy() then the function would destroy memory contents. For
a solution, we considered recompiling standard libraries with our techniques or
making wrapper functions that check address parameters. Also, our mechanism
cannot handle the case where a user intentionally skips the code checking
sequences or modifies a program binary. To prevent malicious usage, user
authentication on code updating would be required.
RETOS, safety
mechanism applied operating system, is currently being developed by our
research group. Although this paper shows that RETOS protects the system from
errant applications, supplement for libraries and system calls is required in
order to program applications easily. We are presently developing a network
stack for energy efficient radio communication on RETOS, as well as
implementing device drivers for diverse sensors and porting to other
processors.
Acknowledgements
This work was supported in part by the National
Research Laboratory(NRL) program of the Korea Science and Engineering
Foundation (2005-01352), and the ITRC programs(MMRC) of IITA, Korea.
References
[1] D. Culler, P. Dutta, C. T. Eee, R. Fonseca, J. Hui, P.
Levis, J. Polastre, S. Shenker, I. Stoica, G. Tolle, and J. Zhao, "Towards
a Sensor Network Architecture: Lowering the Waistline," Proceedings of
the 10th Workshop on Hot Topics in Operating Systems (HotOS X), Santa Fe,
NM, USA, June 2005.
[2] V. Handziski, J. Polastre, J. Hauer, C. Sharp, A.
Wolisz and D. Culler, "Flexible Hardware Abstraction for Wireless Sensor
Networks", Proceedings of the 2nd European Workshop on WirelessSensor
Networks (EWSN'05), Istanbul, Turkey, January 2005.
[3] J. Hill, R. Szewczyk, A. Woo, S. Hollar, D. Culler, and
K. Pister, "System architecture directions for network
sensors," Proceedings of the 9th International Conference on
Architectural Support for Programming Languages and Operating Systems (ASPLOS
IX), Cambridge, MA, USA, November 2000.
[4] S. Bhatti, J. Carlson, H. Dai, J.
Deng, J. Rose, A. Sheth, B. Shucker, C. Gruenwald, A. Torgerson, and R. Han, "MANTIS
OS: An Embedded Multithreaded Operating System for Wireless Micro Sensor
Platforms, " ACM/Kluwer Mobile Networks & Applications (MONET),
Special Issue on Wireless Sensor Networks, vol. 10, no. 4, August 2005.
[5] C. Han, R. K. Rengaswamy, R. Shea, E. Kohler, and M.
Srivastava, "SOS: A dynamic operating system for sensor networks," Proceedings
of the 3rd International Conference on Mobile Systems, Applications, And
Services (MobiSys'05), Seattle, WA, USA, June 2005.
[6] P. Levis and D. Culler, "Maté: A Tiny Virtual
Machine for Sensor Networks," Proceedings of the 10th International
Conference on Architectural Support for Programming Languages and Operating
Systems (ASPLOS X), San Jose, CA, USA, October 2002.
[7] Deluge: TinyOS Network
Programming, https://www.cs.berkeley.edu/~jwhui/research/deluge/
[8] R. Wahbe, S. Lucco, T. E. Anderson, and S. L. Graham,
"Software-based fault isolation," Proceedings of the 14th ACM
Symposium on Operating System Principles (SOSP'93), Asheville, NC, USA,
December 1993.
[9] G. C. Necula. "Proof-carrying
code," Proceedings
of the 24th ACM SIGPLAN-SIGACT Symposium on Principles of Programming Languages
(POPL'97), Paris, France,
January 1997.
[10] T. Jim, G. Morrisett, D.
Grossman, M. Hicks, J. Cheney, and Y. Wang, "Cyclone: A safe dialect of
C," Proceedings of the 2002 USENIX Annual Technical Conference, Monterey, CA, USA, June 2002.
[11] D. Dhurjati, S. Kowshik, V. Adve,
and C. Lattner. "Memory safety without runtime checks or garbage collection." Proceedings of Languages, Compilers and Tools
for Embedded Systems (LCTES'03), San Diego, CA, June 2003.
[12] R. West, and G. T. Wong, "Cuckoo: a Language for
Implementing Memory and Thread-safe System Service", Proceedings of the 2005
International Conference on Programming Languages and Compilers (PLC'05), Las Vegas, NV, USA, June 2005.
[13] Moteiv, Inc., https://www.moteiv.com.
[14] W. Jung, S. Shin, S. Choi, and H. Cha, "Reducing Congestion in
Real-Time Multi-Party Tracking Sensor Network Application," Proceedings of
the 1st International Workshop on RFID and Ubiquitous Sensor Networks, Nagasaki, Japan, December 2005.

