|
USENIX 2006 Annual Technical Conference Refereed Paper
[USENIX 2006 Annual Technical Conference Technical Program]
Loose Synchronization for Large-Scale Networked Systems
Jeannie Albrecht, Christopher Tuttle, Alex C. Snoeren, and Amin Vahdat
University of California, San Diego
{jalbrecht, ctuttle, snoeren, vahdat}@cs.ucsd.edu
Abstract:
Traditionally, synchronization barriers ensure that no cooperating
process advances beyond a specified point until all processes have
reached that point. In heterogeneous large-scale distributed computing
environments, with unreliable network links and machines that may become
overloaded and unresponsive, traditional barrier semantics are too
strict to be effective for a range of emerging applications. In this
paper, we explore several relaxations, and introduce a partial
barrier, a synchronization primitive designed to enhance liveness in
loosely coupled networked systems. Partial barriers are robust to
variable network conditions; rather than attempting to hide the
asynchrony inherent to wide-area settings, they enable appropriate
application-level responses. We evaluate the improved performance of
partial barriers by integrating them into three publicly available
distributed applications running across PlanetLab. Further, we show how
partial barriers simplify a re-implementation of MapReduce that targets
wide-area environments.
1 Introduction
Today's resource-hungry applications are increasingly deployed across
large-scale networked systems, where significant variations in processor
performance, network connectivity, and node reliability are the norm.
These installations lie in stark contrast to the tightly-coupled cluster
and supercomputer environments traditionally employed by
compute-intensive applications. What remains unchanged, however, is the
need to synchronize various phases of computation across the
participating nodes. The realities of this new environment place
additional demands on synchronization mechanisms; while existing
techniques provide correct operation, performance is often severely
degraded. We show that new, relaxed synchronization semantics can
provide significant performance improvements in wide-area distributed
systems.
Synchronizing parallel, distributed computation has long been the focus
of significant research effort. At a high level, the goal is to ensure
that concurrent computation tasks--across independent threads,
processors, nodes in a cluster, or spread across the Internet--are
able to make independent forward progress while still maintaining some
higher-level correctness semantic. Perhaps the simplest synchronization
primitive is the barrier [19], which establishes a rendezvous
point in the computation that all concurrent nodes must reach before any
are allowed to continue. Bulk synchronous parallel programs running on
MPPs or clusters of workstations employ barriers to perform
computation and communication in phases, transitioning from one
consistent view of shared underlying data structures to another.
In past work, barriers and other synchronization primitives have defined
strict semantics that ensure safety--i.e., that no node falls out
of lock-step with the others--at the expense of liveness. In
particular, if employed naively, a parallel computation using barrier
synchronization moves forward at the pace of the slowest node and
the entire computation must be aborted if any node fails. In
closely-coupled supercomputer or cluster environments, skillful
programmers optimize their applications to reduce these
synchronization overheads by leveraging knowledge about the relative
speed of individual nodes. Further, dataflow can be carefully crafted
based upon an understanding of transfer times and access latencies to
prevent competing demand for the I/O bus. Finally, recovering from
failure is frequently expensive; thus, failure during computation is
expected to be rare.
In large-scale networked systems--where individual node speeds are
unknown and variable, communication topologies are
unpredictable, and failure is commonplace--applications must be
robust to a range of operating conditions. The performance tuning
common in cluster and supercomputing environments is impractical,
severely limiting the performance of synchronized
concurrent applications. Further, individual node failures are almost
inevitable, hence applications are generally engineered to adapt to or
recover from failure. Our work focuses on
distributed settings where online performance optimization is
paramount and correctness is ensured through other mechanisms.
We introduce adaptive
mechanisms to control the degree of concurrency in cases where
parallel execution appears to be degrading performance due to
self-interference.
At a high level, emerging distributed applications all implement some form of
traditional synchronizing barriers. While not necessarily executing a
SIMD instruction stream, different instances of the distributed
computation reach a shared point in the global computation. Relative to
traditional barriers, however, a node arriving at a barrier need not
necessarily block waiting for all other instances to arrive--doing so
would likely sacrifice efficiency or even liveness as the system waits
for either slow or failed nodes. Similarly, releasing a barrier does
not necessarily imply that all nodes should pass through the barrier
simultaneously--e.g., simultaneously releasing thousands of nodes to
download a software package effectively mounts a denial-of-service
attack against the target repository. Instead, applications
manage the entry and release semantics of their logical barriers in an
ad hoc, application-specific manner.
This paper defines, implements, and evaluates a new synchronization
primitive that meets the requirements of a broad range of large-scale
network services. In this context, we make the following contributions:
We introduce a partial barrier, a synchronization primitive
designed for heterogeneous failure-prone environments. By relaxing
traditional semantics, partial barriers enhance liveness in the face
of slow, failed, and self-interfering nodes.
Based on the observation that
the arrival rate at a barrier will often form a heavy-tailed
distribution, we design a heuristic to dynamically detect the
knee of the curve--the point at which arrivals slow
considerably--allowing applications to continue despite slow nodes.
We also adapt the rate of release from a barrier to prevent
performance degradation in the face of self-interfering processes.
We adapt three publicly available, wide-area services to use
partial barriers for synchronization, and reimplement a fourth. In
particular, we use partial barriers to reduce the implementation
complexity of an Internet-scale version of MapReduce [9]
running across PlanetLab. In all four cases, partial barriers result
in a significant performance improvement.
2 Distributed barriers
We refer to nodes as entering a barrier when they reach a point
in the computation that requires synchronization. When a barrier
releases or fires (we use the terms inter-changeably), the
blocked nodes are allowed to proceed. According to strict barrier
semantics, ensuring safety, i.e., global synchronization,
requires all nodes to reach a synchronization point before any node
proceeds. In the face of wide variability in performance and prominent
failures, however, strict enforcement may force the majority of nodes to
block while waiting for a handful of slow or failed nodes to catch up.
Many wide-area applications already have the ability to reconfigure
themselves to tolerate node failure. We can harness this functionality
to avoid excessive waits at barriers: once slow nodes are identified,
they can be removed and possibly replaced by quicker nodes for the
remainder of the execution.
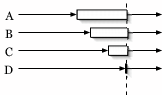
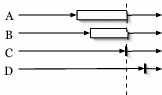
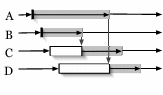
Figure 1:
(a) Traditional semantics: All hosts enter the barrier
(indicated by the white boxes) and are simultaneously released
(indicated by dotted line).
(b) Early entry: The barrier fires after 75% of the hosts
arrive.
(c) Throttled release: Hosts are released in pairs every  seconds.
(d) Counting semaphore: No more than 2 processes are
simultaneously allowed into a ``critical section'' (indicated by the
grey regions). When one node exits the critical section, another
host is allowed to enter. seconds.
(d) Counting semaphore: No more than 2 processes are
simultaneously allowed into a ``critical section'' (indicated by the
grey regions). When one node exits the critical section, another
host is allowed to enter.
|
|
|
(a) |
(b) |

|
|
|
(c) |
(d) |
One of the important questions, then, is determining when to release a
barrier, even if all nodes have not arrived at the synchronization
point. That is, it is important to dynamically determine the point
where waiting for additional nodes to enter the barrier will cost the
application more than the benefit brought by any additional arriving
nodes in the future. This determination often depends on the semantics
of individual applications. Even with full knowledge of application
behavior, making the decision appropriately requires future knowledge.
One contribution of this work is a technique to dynamically identify
``knees'' in the node arrival process, i.e., points where the
arrival process significantly slows. By communicating these points to
the application we allow it to make informed decisions regarding when to
release.
A primary contribution of this work is the definition of relaxed barrier
semantics to support a variety of wide-area distributed computations.
To motivate our proposed extensions consider the following application
scenarios:
Application initialization. Many distributed applications
require a startup phase to initialize their local state and to
coordinate with remote participants before beginning their operation.
Typically, developers introduce an artificial delay judged to be
sufficient to allow the system to stabilize. If each node entered a
barrier upon completing the initialization phase, developers would be
freed from introducing arbitrarily chosen delays into the interactive
development/debugging cycle.
Phased computation and communication. Scientific applications
and large-scale computations often operate in phases consisting of one
or many sequential, local computations, followed by periods of global
communication or parallel computation.
These computations naturally map to the barrier abstraction: one phase
of the computation must complete before proceeding to the next phase.
Other applications operate on a work queue that distributes tasks to
available machines based on the rate that they complete individual
tasks. Here, a barrier may serve as a natural point for distributing
work.
Coordinated measurement. Many distributed applications measure
network characteristics. However, uncoordinated measurements can
self-interfere, leading to wasted effort and incorrect results. Such
systems benefit from a mechanism that limits the number of nodes that
simultaneously perform probes. Barriers are capable of providing this
needed functionality. In this case, the application uses two barriers
to delimit a ``critical section'' of code (e.g., a network measurement).
The first barrier releases some maximum number of nodes into the
critical section at a time and waits until these nodes reach the second
barrier, thereby exiting the critical section, before releasing the next
round.
To further clarify the goal of our work, it is perhaps worthwhile to
consider what we are not trying to accomplish. Partial barriers
provide only a loose form of group
membership [8,16,27]. In
particular, partial barriers do not provide any ordering of messages
relative to barriers as in virtual synchrony [2,3],
nor do partial barriers require that all participants come to consensus
regarding a view change [24]. In effect, we
strive to construct an abstraction that exposes the asynchrony and the
failures prevalent in wide-area computing environments in a manner that
allows the application to make dynamic and adaptive decisions as to how
to respond.
It is also important to realize that not all applications will benefit
from relaxed synchronization semantics. The correctness of certain
classes of applications cannot be guaranteed without complete
synchronization. For example, some applications may require a minimum
number of hosts to complete a computation. Other applications may
approximate a measurement (such as network delay) and continuing without
all nodes reduces the accuracy of the result. However, many distributed
applications, including the ones described in Section 5,
can afford to sacrifice global synchronization without negatively
impacting the results. These applications either support dynamically
degrading the computation, or are robust to failures and can tolerate
mid-computation reconfigurations. Our results indicate that for
applications that are willing and able to sacrifice safety, our
semantics have the potential to improve performance significantly.
3 Design and implementation
Partial barriers are a set of semantic extensions to the traditional
barrier abstraction. Our implementation has a simple interface for
customizing barrier functionality. This section describes these
extended semantics, details our API, and presents the implementation
details.
We define two new barrier semantics to support emerging wide-area
computing paradigms and discuss each below.
Early entry - Traditional barriers require all nodes to enter a
barrier before any node may pass through, as in Figure 1(a).
A partial barrier with early entry is instantiated with a timeout, a
minimum percentage of entering nodes, or both. Once the barrier has met
either of the specified preconditions, nodes that have already entered a
barrier are allowed to pass through without waiting for the remaining
slow nodes (Figure 1(b)). Alternatively, an application may
instead choose to receive callbacks as nodes enter and manually release
the barrier, enabling the evaluation of arbitrary predicates.
Throttled-release - Typically, a barrier releases all nodes
simultaneously when a barrier's precondition is met. A partial barrier
with throttled-release specifies a rate of release, such as two nodes
every seconds as shown in Figure 1(c). A special
variation of throttled-release barriers allows applications to limit the
number of nodes that simultaneously exist in a ``critical section'' of
code, creating an instance of a counting semaphore [10]
(shown in Figure 1(d)), which may be used, for example, to
throttle the number of nodes that simultaneously perform network
measurements or software downloads. A critical distinction between
traditional counting semaphores and partial barriers, however, is our
support for failure. For instance, if a sufficient number of slow or
soon-to-fail nodes pass a counting semaphore, they will limit access to
other participants, possibly forever. Thus, as with early-entry
barriers, throttled-release barriers eventually time out slow or failed
nodes, allowing the system as a whole to make forward progress despite
individual failures.
One issue that our proposed semantics introduce that does not arise with
strict barrier semantics is handling nodes performing late entry, i.e., arriving at an already released barrier. We support two
options to address this case: i) pass-through semantics that allow the
node to proceed with the next phase of the computation even though it
arrived late; ii) catch-up semantics that issue an exception allowing
the application to reintegrate the node into the mainline computation in
an application-specific manner, which may involve skipping ahead to the
next barrier (omitting the intervening section of code) in an effort to
catch up to the other nodes.
class Barrier {
Barrier(string name, int max, int timeout,
int percent, int minWait);
static void setManager(string Hostname);
void enter(string label, string Hostname);
void setEnterCallback(bool (*callbackFunc)(string label,
string Hostname, bool default), int timeout);
map getHosts(void);
}
Figure 2: Barrier instatiation API.
Figure 2 summarizes the partial barrier API from an
application's perspective. Each participating node initializes a
barrier with a constructor that takes the following arguments: name, max, timeout, percent, and minWait.
name is a globally unique identifier for the barrier. max
specifies the maximum number of participants in the barrier. (While we
do not require a priori knowledge of participant identity, it
would be straightforward to add.) The timeout in milliseconds
sets the maximum time that can pass from the point where the first node
enters a barrier before the barrier is released. The percent
field similarly captures a minimum percentage out of the maximum number
nodes that must reach the barrier to activate early release. The minWait field is associated with the percent field and
specifies a minimum amount of time to wait (even if the specified
percentage of nodes have reached) before releasing the barrier with less
than the maximum number of nodes. Without this field, the barrier will
deterministically be released upon reaching the threshold percent of
entering nodes even when all nodes are entering rapidly. However, the
barrier is always released if max nodes arrive, regardless of minWait. The timeout field overrides the percent and
minWait fields; the barrier will fire if the timeout is reached,
regardless of the percentage of nodes entering the barrier. The last
three parameters to the constructor are optional--if left unspecified
the barrier will operate as a traditional synchronization barrier.
Coordination of barrier participants is controlled by a barrier manager
whose identity is specified at startup by the setManager()
method. Participants call the barrier's enter() method and pass
in their Hostname and label when they reach the
appropriate point in their execution. (The label argument
supports advanced functionality such as load balancing for MapReduce
as described in Section 5.4.) The participant's enter() method notifies the manager that the particular node has
reached the synchronization point. Our implementation supports
blocking calls to enter() (as described here) or optionally a
callback-based mechanism where the entering node is free to perform
other functionality until the appropriate callback is received.
While our standard API provides simplistic support for the early release
of a barrier, an application may maintain its own state to determine
when a particular barrier should fire and to manage any side effects
associated with barrier entry or release. For instance, a barrier
manager may wish to kill processes arriving late to a particular
(already released) barrier. To support application-specific
functionality, the setEnterCallback() method specifies a function
to be called when any node enters a barrier. The callback takes the
label and Hostname passed to the enter() method and a
boolean variable that specifies whether the manager would normally
release the barrier upon this entry. The callback function returns a
boolean value to specify whether the barrier should actually be released
or not, potentially overriding the manager's decision. A second
argument to setEnterCallback() called timeout specifies a
maximum amount of time that may pass before successive invocations of
the callback. This prevents the situation where the application waits a
potentially infinite amount of time for the next node to arrive before
deciding to release the barrier. We use this callback API to implement
our adaptive release techniques presented in Section 4.
Barrier participants may wish to learn the identity of all hosts that
passed through a barrier, similar to (but with relaxed semantics from)
view advancement or GBCAST in virtual synchrony [4]. The
getHosts() method returns a map of Hostnames and labels through a remote procedure call with the barrier manager. If
many hosts are interested in membership information, it can optionally
be propagated from the barrier manager to all nodes by default as part
of the barrier release operation.
class ThrottleBarrier extends Barrier {
void setThrottleReleasePercent(int percent);
void setThrottleReleaseCount(int count);
void setThrottleReleaseTimeout(int timeout);
}
class SemaphoreBarrier extends Barrier {
void setSemaphoreCount(int count);
void setSemaphoreTimeout(int timeout);
void release(string label, string Hostname);
void setReleaseCallback(int (*callbackFunc)(string label,
string Hostname, int default), int timeout);
}
Figure 3: ThrottleBarrier and SemaphoreBarrier API.
Figure 3 describes a subclass of Barrier, called ThrottleBarrier, with throttled-release
semantics. These semantics allow for a pre-determined subset of the
maximum number of nodes to be released at a specified rate. The methods
setThrottleReleasePercent() and setThrottleReleaseCount()
periodically release a percentage and number of nodes, respectively,
once the barrier fires. setThrottleReleaseTimeout() specifies the
periodicity of release.
Figure 3 also details a variant of
throttled-release barriers, SemaphoreBarrier, which
specifies a maximum number of nodes that may simultaneously enter a
critical section. A SemaphoreBarrier extends the
throttled-release semantics further by placing a barrier at the
beginning and end of a critical section of activity to ensure that only
a specific number of nodes pass into the critical section
simultaneously. One key difference for this type of barrier is that it does
not require any minimum number of nodes to enter the barrier before
beginning to release nodes into the subsequent critical section. It
simply mandates a maximum number of nodes that may simultaneously enter
the critical section. The setSemaphoreCount() method sets
this maximum number. Nodes call the barrier's release()
method upon completing the subsequent critical section, allowing the
barrier to release additional nodes. setSemaphoreTimeout()
allows for timing out nodes that enter the critical section but do not
complete within a maximum amount of time. In this case, they are
assumed to have failed, enabling the release of additional nodes.
The setReleaseCallback() enables application-specific
release policies and timeout of slow or failed nodes in the critical
section. The callback function in setReleaseCallback()
returns the number of hosts to be released.
Partial barrier participants implement the interface described above
while a separate barrier manager coordinates communication across nodes.
Our implementation of partial barriers consists of approximately 3000
lines of C++ code. At a high level, a node calling
enter() transmits a BARRIER_REACHED message
using TCP to the manager with the calling host's unique identifier,
barrier name, and label. The manager updates its local state for the
barrier, including the set of nodes that have thus far entered the
barrier, and performs appropriate callbacks as necessary. The manager
starts a timer to support various release semantics if this is the first
node entering the barrier and subsequently records the inter-arrival
times between nodes entering the barrier.
If a sufficient number of nodes enter the barrier or a specified amount
of time passes, the manager transmits FIRE messages using TCP to all
nodes that have entered the barrier. For throttled release
barriers, the manager releases the specified number of nodes from the
barrier in FIFO order. The manager also sets a timer as specified by
setThrottleReleaseTimeout() to release additional nodes from the
barrier when appropriate.
For semaphore barriers, the manager releases the number of nodes
specified by setSemaphoreCount() and, if specified by setSemaphoreTimeout(), also sets a timer to expire for each node
entering the critical section. Each call to enter() transmits a
SEMAPHORE_REACHED message to the manager. In response, the manager
starts the timer associated with the calling node. If the semaphore
timer associated with the node expires before receiving the
corresponding SEMAPHORE_RELEASED message, the manager assumes that node
has either failed or is proceeding sufficiently slowly that an
additional node should be released into the critical section. Each
SEMAPHORE_RELEASED message releases one additional node into the
critical section.
For all barriers, the manager must gracefully handle nodes arriving
late, i.e., after the barrier has fired. We employ two techniques
to address this case. For pass-through semantics, the manager transmits
a LATE_FIRE message to the calling node, releasing it from the barrier.
In catch-up semantics, the manager issues an exception and transmits a
CATCH_UP message to the node. Catch-up semantics allow applications to
respond to the exception and determine how to reintegrate the node into
the computation in an application-specific manner.
The type of barrier--pass-through or catch-up--is specified at barrier
creation time (intentionally not shown in Figure 2
for clarity). Nodes calling enter() may register local callbacks
with the arrival of either LATE_FIRE or CATCH_UP messages for
application-specific re-synchronization with the mainline computation,
or perhaps to exit the local computation altogether if
re-synchronization is not possible.
One concern with our centralized barrier manager is tolerating manager
faults. We improve overall system
robustness with support for replicated managers. Our algorithm is a
variant of traditional primary/backup systems: each participant
maintains an ordered list of barrier controllers. Any message sent from
a client to the logical barrier manager is sent to all controllers on
the list. Because application-specific entry callbacks may be
non-deterministic, a straightforward replicated state machine approach
where each barrier controller simultaneously decides when to fire is
insufficient. Instead, the
primary controller forwards all BARRIER_REACHED messages to the backup
controllers. These messages act as implicit ``keep alive'' messages
from the primary. If a backup controller receives BARRIER_REACHED
messages from clients but not the primary for a sufficient period of
time, the first backup determines the primary has failed and assumes
the role of primary controller. The secondary backup takes over should
the primary fail, and so on. Note that our approach admits the case
where multiple controllers simultaneously act as the primary controller
for a short period of time. Clients ignore duplicate FIRE messages for
the same barrier, so progress is assured, and one controller
eventually emerges as primary.
Although using the replicated manager scheme described above lowers
the probability of losing BARRIER_REACHED messages, it does not
provide any increased reliability with respect to messages sent from
the manager(s) to the remote hosts. All messages are sent using
reliable TCP connections. If a connection fails between the manager
and a remote host, however, messages may be lost. For example,
suppose the TCP connections between the manager and some subset of the
remote hosts break just after the manager sends a FIRE message to all
participants. Similarly, if a group of nodes fails after entering the
barrier, but before receiving the FIRE message, the failure may go
undetected until after the controller transmits the FIRE messages. In
these cases, the manager will attempt to send FIRE messages to all
participants, and detect the TCP failures after the connections time
out. Such ambiguity is unavoidable in asynchronous systems; the
manager simply informs the application of the failure(s) via a
callback and lets the application decide the appropriate recovery
action. As with any other failure, the application may choose to
continue execution and ignore the failures, attempt to find new hosts
to replace the failed ones, or to even abort the execution entirely.
4 Adaptive release
Unfortunately, our extended barrier semantics introduce additional
parameters: the threshold for early release and the concurrency level in
throttled release. Experience has shown it is often difficult to select
values that are appropriate across heterogeneous and changing network
conditions. Hence, we provide adaptive mechanisms to dynamically
determine appropriate values.
There is a fundamental tradeoff in specifying an early-release
threshold. If the threshold is too large, the application will wait
unnecessarily for a relatively modest number of additional nodes to
enter the barrier; if too small, the application will lose the
opportunity to have participation from other nodes had it just waited a
bit longer. Thus, we use the barrier's callback mechanism to determine
release points in response to varying network conditions and node
performance.
In our experience, the distribution of nodes' arrivals at a barrier
is often heavy-tailed: a relatively large portion of
nodes arrive at the barrier quickly with a long tail of stragglers
entering late. In this case, many of our target applications would wish
to dynamically determine the ``knee'' of a particular arrival process
and release the barrier upon reaching it. Unfortunately, while it can
be straightforward to manually determine the knee off-line once all of
the data for an arrival process is available, it is difficult to
determine this point on-line.
Our heuristic, inspired by TCP retransmission timers and
MONET [1], maintains an exponentially weighted moving average
(EWMA) of the host arrival times (arr), and another EWMA of the
deviation from this average for each measurement (arrvar). As each
host arrives at the barrier, we record the arrival time of the host, as
well as the deviation from the average. Then we recompute the EWMA for
both arr and arrvar, and use the values to compute a maximum wait
threshold of arr + 4 * arrvar. This threshold indicates the maximum
time we are willing to wait for the next host to arrive before firing
the barrier. If the next host does not arrive at the barrier before the
maximum wait threshold passes, we assume that a knee has been reached.
Figure 4 illustrates how these values interact for a
simulated group of 100 hosts entering a barrier with randomly generated
exponential inter-arrival times. Notice that a knee occurs each time
the host arrival time intersects the threshold line.
Figure 4:
Dynamically determining the knee of arriving
processes. Vertical bars indicate a knee detection.
 |
With the capability to detect multiple knees, it is important
to provide a way for applications to pick the right knee and avoid
firing earlier or later than desired. Aggressive applications may
choose to fire the barrier when the first knee is detected.
Conservative applications may wish to wait until some specified amount
of time has passed, or a minimum percentage of hosts have entered the
barrier before firing. To support both aggressive and conservative
applications, our algorithm allows the application to specify a minimum
percentage of hosts, minimum waiting time, or both for each barrier. If
an application specifies a minimum waiting time of 5 seconds, knees
detected before 5 seconds are ignored. Similarly, if a minimum host
percentage of 50% is specified, the knee detector ignores knees
detected before 50% of the total hosts have entered the barrier. If
both values are specified, the knee detector uses the more conservative
threshold so that both requirements (time and host percentage) are met
before firing.
One variation in our approach compared to other related approaches is
the values for the weights in the moving averages. In the RFC for
computing TCP retransmission timers [7], the weight in the EWMA of the
rtt places a heavier weight (0.875) on previous delay
measurements. This value works well for TCP since the average delay is
expected to remain relatively constant over time. In our case, however,
we expect the average arrival time to increase, and thus we decreased
the weight to be 0.70 for previous measurements of arr. This allows our
arr value to more closely follow the actual data being
recorded. When measuring the average deviation, which is computed by
averaging | sample - arr | (where sample
represents the latest arrival time recorded), we used a weight of 0.75
for previous measurements, which is the same weight used in TCP for the
variation in rtt.
We also employ an adaptive method to dynamically adjust the amount of
concurrency in the ``critical section'' of a semaphore barrier. In many
applications, it is impractical to select a single value which performs
well under all conditions. Similar in spirit to SEDA's thread-pool
controller [35], our adaptive release algorithm selects an
appropriate concurrency level based upon recent release times. The
algorithm starts with low level of concurrency and increases the degree
of concurrency until response times worsen; it then backs off and
repeats, oscillating about the optimum value.
Mathematically, the algorithm compares the median of the distributions
of recent and overall release times. For example, if there are 15 hosts
in the critical section when the 45th host is released, the algorithm
computes the median release time of the last 15 releases, and of all 45.
If the latest median is more than 50% greater than the overall median,
no additional hosts are released, thus reducing the level of concurrency
to 14 hosts. If the latest median is more than 10% but less than 50%
greater than the overall median, one host is released, maintaining a
level of concurrency of 15. In all other cases, two hosts are released,
increasing the concurrency level to 16. The thresholds and differences
in size are selected to increase the degree of concurrency whenever
possible, but keep the magnitude of each change small.
5 Applications
We integrated partial barriers into three wide-area, distributed
applications with a range of synchronization requirements. We
reimplemented a fourth application whose source code was unavailable.
While a detailed discussion of these applications is beyond the scope of
this paper, we present a brief overview to facilitate understanding of
our performance evaluation in Section 6.
Plush [29] is a tool for configuring and managing large-sale
distributed applications, such as PlanetLab [28] and the
Grid [13]. Users specify a description of: i) a set of nodes
to run their application on; ii) the set of software packages, including
the application itself and any necessary data files, that should be
installed on each node; and iii) a directed acyclic graph of individual
processes that should be run, in order, on each node.
Plush may be used to manage long-running services or interactive
experimental evaluations of distributed applications. In the latter
case, developers typically configure a set of machines (perhaps
installing the latest version of the application binary) and then start
the processes at approximately the same time on all participating nodes.
A barrier may be naturally inserted between the tasks of node
configuration and process startup. However, in the heterogeneous
PlanetLab environment, the time to configure a set of nodes with the
requisite software can vary widely or fail entirely at individual hosts.
In this case, it is often beneficial to timeout the ``software
configuration/install'' barrier and either proceed with the available
nodes or to recruit additional nodes.
Bullet [21] is an overlay-based large-file distribution
infrastructure. In Bullet, a source transmits a file to receivers
spread across the Internet. As part of the bootstrap process, all
receivers join the overlay by initially contacting the source before
settling on their final position in the overlay. The published
quantitative evaluation of Bullet presents a number of experiments
across PlanetLab. However, to make performance results experimentally
meaningful when measuring behavior across a large number of receivers,
the authors hard-coded a 30-second delay at the sender from the time
that it starts to the time that it begins data transmission. While
typically sufficient for the particular targeted configuration, the
timeout would often be too long, unnecessarily extending turnaround time
for experimentation and interactive debugging. Depending on overall
system load and number of participants, the timeout would also sometimes
be too short, meaning that some nodes would not complete the join
process at the time the sender begins transmitting. While this latter
case is not a problem for the correct behavior of the system, it makes
interpreting experimental results difficult.
To address this limitation, we integrated partial barriers into the
Bullet implementation. This integration was straightforward. Once the
join process completes, each node simply enters a barrier. The Bullet
sender registers for a callback with the barrier manager to be notified
of a barrier release, at which point it begins transmitting data. By
calling the getHosts() method, the sender can record the
identities of nodes that should be considered in interpreting the
experimental results. The barrier manager notes the identity of nodes
entering the barrier late and instructs them to exit rather than proceed
with retrieving the file.
EMAN [12] is a publicly available software package used for
reconstructing 3D models of particles using 2D electron micrographs.
The program takes a 2D micrograph image as input and then repeatedly
runs a ``refinement'' process on the data to create a 3D model. Each
iteration of the refinement consists of both computationally inexpensive
sequential computations and computationally expensive parallel
computations.
Barriers separate sequential and parallel stages of computation in EMAN.
Using partial barrier semantics adds the benefit of being able to detect
slow nodes, allowing the application to redistribute tasks to faster
machines during the parallel phase of computation. In addition to slow
processors, the knee detector also detects machines with low bandwidth
capacities and reallocates their work to machines with higher bandwidth.
In our test, each refinement phase requires approximately 240 MB of data
to be transferred to each node, and machines with low bandwidth links
have a significant impact on the overall completion time if their work
is not reallocated to different machines. Since the sequential phases
run on a single machine, partial barriers are most applicable to the
parallel phases of computation. We use the publicly available version of
EMAN for our experiments. We wrote a 50-line Perl script to run the
parallel phase of computation on 98 PlanetLab machines using Plush.
5.4 MapReduce
MapReduce [9] is a toolkit for application-specific parallel
processing of large volumes of data. The model involves partitioning
the input data into smaller splits of data, and spreading them
across a cluster of worker nodes. Each worker node applies a map
function to the splits of data that they receive, producing intermediate
key/value pairs that are periodically written to specific locations on
disk. The MapReduce master node tracks these locations, and eventually
notifies another set of worker nodes that intermediate data is ready.
This second set of workers aggregate the data and pass it to the reduce function. This function processes the data to produce a final
output file.
Figure 5:
MapReduce execution. As each map task completes, enter(i)
is called with the unique task identifier. Once all  tasks have entered the Map barrier, it is released. When the
MapReduce controller is notified that the Map barrier has fired,
the
tasks have entered the Map barrier, it is released. When the
MapReduce controller is notified that the Map barrier has fired,
the  reduce tasks are distributed and begin execution.
When all reduce tasks have entered the Reduce barrier, MapReduce is
complete. In both barriers, callback(i) informs the
MapReduce controller of task completions. reduce tasks are distributed and begin execution.
When all reduce tasks have entered the Reduce barrier, MapReduce is
complete. In both barriers, callback(i) informs the
MapReduce controller of task completions.
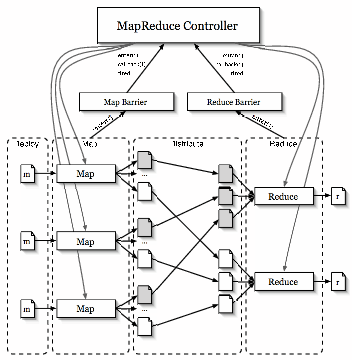 |
Our implementation of MapReduce leverages partial barriers to manage
phases of the computation and to orchestrate the flow of data among
nodes across the wide area. In our design, we have map tasks and
corresponding input files,  total nodes hosting the computation, and
reduce tasks. A central MapReduce controller distributes the
split input files to a set of available nodes (our current
implementation runs on PlanetLab), and spawns the map process on each
node. When the map tasks finish, intermediate files are written back to
a central repository, and then redistributed to hosts, who
eventually execute the reduce tasks. There are a number of natural
barriers in this application, as shown in Figure 5,
corresponding to completion of: i) the initial distribution of split
files to appropriate nodes; ii) executing map functions; iii) the
redistribution of the intermediate files to appropriate nodes, and iv)
executing reduce functions. total nodes hosting the computation, and
reduce tasks. A central MapReduce controller distributes the
split input files to a set of available nodes (our current
implementation runs on PlanetLab), and spawns the map process on each
node. When the map tasks finish, intermediate files are written back to
a central repository, and then redistributed to hosts, who
eventually execute the reduce tasks. There are a number of natural
barriers in this application, as shown in Figure 5,
corresponding to completion of: i) the initial distribution of split
files to appropriate nodes; ii) executing map functions; iii) the
redistribution of the intermediate files to appropriate nodes, and iv)
executing reduce functions.
As with the original MapReduce work, the load balancing aspects
corresponding to barriers (ii) and (iv) (from the previous paragraph)
are of particular interest. Recall that although there are map
tasks, the same physical host may execute multiple map tasks. In these
cases, the goal is not necessarily to wait for all hosts to reach
the barrier, but for all or logical tasks to complete. Thus, we
extended the original barrier entry semantics described in
Section 3 to support synchronizing barriers at the level of
a set of logical, uniquely named tasks or processes, rather than a set
of physical hosts. To support this, we simply invoke the enter()
method of the barrier API (see Figure 2) upon
completing a particular map or reduce function. In addition to the
physical hostname, we send a label corresponding to a globally unique
name for the particular map or reduce task. Thus, rather than waiting
for hosts, the barrier instead waits for or unique labels to
enter the barrier before firing.
For a sufficiently large and heterogeneous distributed system,
performance at individual nodes varies widely. Such variability often
results in a heavy-tailed distribution for the completion of individual
tasks, meaning that while most tasks will complete quickly, the overall
time will be dominated by the performance of the slow nodes. The
original MapReduce work noted that one of the common problems
experienced during execution is the presence of ``straggler'' nodes that
take an unusually long time to complete a map or reduce task. Although
the authors mentioned an application-specific solution to this problem,
by using partial barriers in our implementation we were able to provide
a more general solution that achieved the same results. We use the
arrival rate of map/reduce tasks at their respective barriers to respawn
a subset of the tasks that were proceeding slowly.
By using the knee detector described in Section 4, we
are able to dynamically determine the transition point between rapid
arrivals and the long tail of stragglers. However, rather than
releasing the barrier at this point, the MapReduce controller receives a
callback from the barrier manager, and instead performs load rebalancing
functionality by spawning additional copies of outstanding tasks on
nodes disjoint from the ones hosting the slower tasks (potentially first
distributing the necessary input/intermediate files). As in the
original implementation of MapReduce, the barrier is not concerned with
what copies of the computation complete first; the goal is for all
or tasks to complete as quickly as possible.
The completion rate of tasks also provides an estimate of the throughput
available at individual nodes, influencing future task placement
decisions. Nodes with high throughput are assigned more tasks in the
future. Our performance evaluation in Section 6 quantifies
the benefits of this approach.
Cluster-based MapReduce [9] also found this rebalancing to be
critical for improving performance in more tightly controlled cluster
settings, but did not describe a precise approach for determining when
to spawn additional instances of a given computation.
6 Evaluation
The goal of this section is to quantify the utility of partial barriers
for a range of application scenarios. For all experiments, we randomly
chose subsets from a pool of 130 responsive PlanetLab nodes.
Figure 6:
Scalability of centralized barrier implementation. ``All
hosts'' line shows the average time across 5 runs
for barrier manager to receive BARRIER_REACHED messages from all hosts.
``90th percentile'' line shows the average time across 5 runs for
barrier manager to receive BARRIER_REACHED messages from 90% of
all hosts.
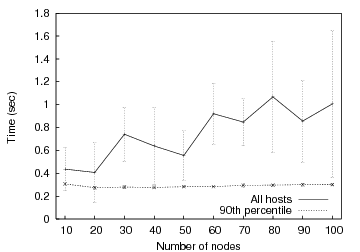 |
To estimate baseline barrier scalability, we measure the time it takes
to move between two barriers for an increasing number of hosts. In this
experiment, the controller waits for all hosts to reach the first
barrier. All hosts are released, and then immediately enter the second
barrier. We measure the time between when the barrier manager sends the
first FIRE message for the first barrier and receives the last
BARRIER_REACHED message for the second barrier. No partial barrier
semantics are used for these measurements. Figure 6
shows the average completion time for varying numbers of nodes across a
total of five runs for each data point with standard deviation.
Notice that even for 100 nodes, the average time for the barrier manager
to receive the last BARRIER_REACHED message for the second barrier is
approximately 1 second. The large standard deviation values indicate
that there is much variability in our results. This is due to the
presence of straggler nodes that delay the firing for several seconds or
more. The 90th percentile, on the other hand, has little variation and
is relatively constant as the number of participants increases. This
augurs well for the potential of partial barrier semantics to improve
performance in the wide area. Overall, we are satisfied with the
performance of our centralized barriers for 100 nodes; we expect to use
hierarchy to scale significantly further.
Next, we consider the benefits of a semaphore barrier to perform
admission control for parallel software installation in Plush. Plush
configures a set of wide-area hosts to execute a particular application.
This process often involves installing the same software packages
located on a central server. Simultaneously performing this install
across hundreds of nodes can lead to thrashing at the server hosting the
packages. The overall goal is to ensure sufficient parallelism such
that the server is saturated (without thrashing) while balancing the
average time to complete the download across all participants.
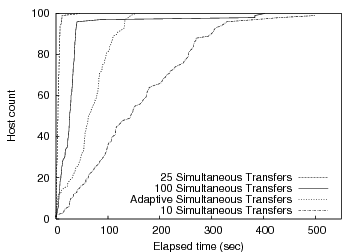
For our results, we use Plush to install the same 10-MB file on 100
PlanetLab hosts while varying the number of simultaneous downloads using
a semaphore barrier. Figure 7 shows the
results of this experiment. The data indicates that limiting
parallelism can improve overall completion rate. Releasing too few
hosts does not fully consume server resources, while releasing too many
taxes available resources, increasing the time to first completion.
This is evident in the graph since 25 simultaneous downloads finishes
more quickly than both 100 and 10 simultaneous transfers.
Figure 7:
Software transfer from a high-speed server to PlanetLab hosts
using a SemaphoreBarrier to limit the number of simultaneous file transfers.
 |
While statically defining the number of hosts allowed to perform
simultaneous downloads works well for our file transfer experiment,
varying network conditions means that statically picking any single
value is unlikely to perform well under all conditions. Some
applications may benefit from a more dynamic throttled release technique
that attempts to find the optimal number of hosts that maximizes
throughput from the server without causing saturation. The ``Adaptive
Simultaneous Transfers'' line in Figure 7
shows the performance of our adaptive release technique. In this
example, the initial concurrency level is  , and the level varies
according to the duration of each transfer. In this experiment the
adaptive algorithm line reaches 100% before the lines representing a
fixed concurrency level of 10 or 100, but the algorithm was too
conservative to match the optimal static level of 25 given the network
conditions at the time. , and the level varies
according to the duration of each transfer. In this experiment the
adaptive algorithm line reaches 100% before the lines representing a
fixed concurrency level of 10 or 100, but the algorithm was too
conservative to match the optimal static level of 25 given the network
conditions at the time.
In this section we consider our ability to dynamically detect knees in a
heavy-tailed arrival processes. We observe that when choosing a
substantial number of time-shared PlanetLab hosts to perform the same
amount of work, the completion time varies widely, often following an
exponential distribution. This variation makes it difficult to
coordinate distributed computation. To quantify our ability to more
adaptively set timeouts and coordinate the behavior of multiple
wide-area nodes, we used a barrier to synchronize senders and receivers
in Bullet while running across a varying number of PlanetLab nodes. We
set the barrier to dynamically detect the knee in the arrival process as
described in Section 4. Upon reaching the knee, nodes
already in the barrier are released; one side effect is that the sender
begins data transmission. Bullet ignores all late arriving nodes.
Figure 8 plots the cumulative distribution of
receivers that enter the startup barrier on the y-axis as a function of
time progressing on the x-axis. Each curve corresponds to an experiment
with 50, 90, or 130 PlanetLab receivers in the initial target set. The
goal is to run with as many receivers as possible from the given initial
set without waiting an undue amount of time for a small number of
stragglers to complete startup. Interestingly, it is insufficient to
filter for any static set of known ``slow'' nodes as performance tends
to vary on fairly small time scales and can be influenced by multiple
factors at a particular node (including available CPU, memory, and
changing network conditions). Thus, manually choosing an appropriate
static set may be sufficient for one particular batch of runs but not
likely the next.
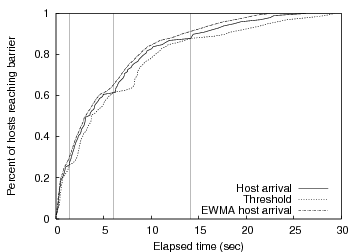
Figure 8:
A startup barrier that regulates nodes joining a large-scale overlay.
Vertical bars indicate when the barrier detects a knee
and fires.
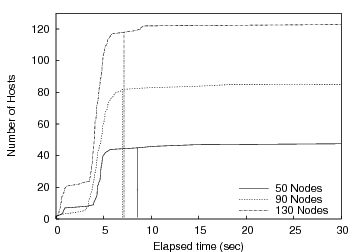 |
Vertical lines in Figure 8 indicate where the barrier manager
detects a knee and releases the barrier. Although we ran the experiment
multiple times, for clarity we plot the results from a single run.
While differences in time of day or initial node characteristics affect
the quantitative behavior, the general shape of the curve is maintained.
However, in all of our experiments, we are satisfied with our ability to
dynamically determine the knee of the arrival process. The experiments
are typically able to proceed with 85-90% of the initial set
participating.
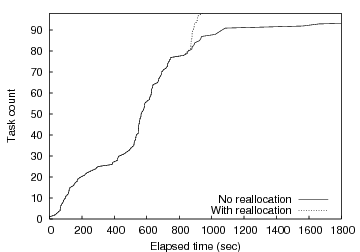
For our next evaluation, we added a partial barrier to the parallel
computation of EMAN's refinement process. Upon detecting a knee, we
reallocate tasks to faster machines. Figure 9 shows the results of running EMAN with and
without partial barrier semantics. In this experiment we ran EMAN on
the 98 most responsive PlanetLab machines. The workflow consists of
several serial tasks (not shown), and a 98-way image classification
step, run in parallel. Each participant first downloads a 40-MB archive
containing the EMAN executables and a wrapper script. After unpacking
the archive, each node downloads a unique 200-MB data file and begins
running the classification process. At the end of the computation, each
node generates 77 output files stored on the local disk, which EMAN
merges into 77 "master'' files once all tasks complete.
After 801 seconds, the barrier detects a knee and reallocates the
remaining tasks to idle machines among those initially allocated to the
experiment; these finish shortly afterward. The ``knee'' in the curve
at approximately 300 seconds indicates that around 21 hosts have good
connectivity to the data repository, while the rest have longer transfer
times. While the knee detection algorithm detects a knee at 300 seconds,
a minimum threshold of 60% prevents reconfiguration. The second knee is
detected at 801 seconds, which starts a reconfiguration of 10
tasks. These tasks complete by 900 seconds, while the original set
continue past 2700 seconds, for an overall speedup of more than 3.
Figure 9:
EMAN. Knee detected at 801 seconds. Total runtime is over
2700 seconds.
 |
We now consider an alternative use of partial barriers: to assist not
with the synchronization of physical hosts or processors, but with load
balancing of logical tasks spread across cooperating wide-area nodes.
Further, we wish to determine whether we can dynamically detect knees in
the arrival rate of individual tasks, spawning additional copies of
tasks that appear to be proceeding slowly on a subset of nodes.
We conduct these experiments with our implementation of MapReduce (see
Section 5.4) with  map tasks and map tasks and  reduce
tasks running across reduce
tasks running across  PlanetLab hosts. During each of the map and
reduce rounds, the MapReduce controller evenly partitions the tasks over
the available hosts and starts the tasks asynchronously. For this
experiment, each map task simply reads 2000 random words from a local
file and counts the number of instances of certain words. This count is
written to an intermediate output file based on the hash of the words.
The task is CPU-bound and requires approximately 7 seconds to complete
on an unloaded PlanetLab-class machine. The reduce tasks summarize
these intermediate files with the same hash values. PlanetLab hosts. During each of the map and
reduce rounds, the MapReduce controller evenly partitions the tasks over
the available hosts and starts the tasks asynchronously. For this
experiment, each map task simply reads 2000 random words from a local
file and counts the number of instances of certain words. This count is
written to an intermediate output file based on the hash of the words.
The task is CPU-bound and requires approximately 7 seconds to complete
on an unloaded PlanetLab-class machine. The reduce tasks summarize
these intermediate files with the same hash values.
Thus, each map and reduce task performs an approximately equal amount of
work as in the original MapReduce work [9], though it would be
useful to generalize to variable-length computation. When complete, a
map or reduce task enters the associated barrier with a unique
identifier for the completed work. The barrier manager monitors the
arrival rate and dynamically determines the knee, which is the where the
completion rate begins to slow. We empirically determined that this
slowing results from a handful of nodes that proceed
substantially slower than the rest of the system. (Note that this
phenomenon is not restricted to our wide-area environment; Dean and
Ghemawat observed the same behavior for their runs on tightly coupled
and more homogeneous clusters [9].) Thus, upon detecting the
knee a callback to the MapReduce controller indicates that additional
copies of the slow tasks should be respawned, ideally on nodes with the
smallest number of outstanding tasks. Typically, by the time the knee
is detected there are a number of hosts that have completed their
initial allocation of work.
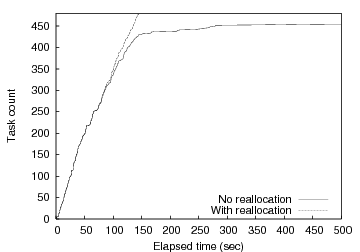
Figure 10 shows the performance of one
MapReduce run both with and without task respawn upon detecting the
knee. Figure 10 plots the cumulative
number of completed tasks on the y-axis as a function of time
progressing on the x-axis. We see that the load balancing enabled by
barrier synchronization on abstract tasks is critical to overall system
performance. With task respawn using knee detection, the barrier
manager detects the knee approximately 68 seconds into the experiment
after approximately 53% of the tasks have completed. At this point, the
MapReduce controller (via a callback from the Barrier class)
repartitions the remaining 47% of the tasks across available wide-area
nodes. This is where the curves significantly diverge in the
graph. Without dynamic rebalancing the completion rate transitions to a
long-tail lasting more than 2500 seconds (though the graph only shows
the first 500 seconds), while the completion rate largely maintains its
initial slope when rebalancing is enabled. Overall, our barrier-based
rebalancing results in a factor of sixteen speedup in completion time
compared to proceeding with the initial mapping. Multiple additional
runs showed similar results.
Figure 10:
MapReduce:
 with uniform prepartitioning of
the data. Knee detection occurs at 68 seconds and callbacks
enable rebalancing. with uniform prepartitioning of
the data. Knee detection occurs at 68 seconds and callbacks
enable rebalancing.
 |
Note that this load balancing approach differs from the alternate
approach of trying to predict the set of nodes likely to deliver the
highest level of performance a priori. Unfortunately, predicting
the performance of tasks with complex resource requirements on a shared
computing infrastructure with dynamically varying CPU, network, and I/O
characteristics is challenging in the best case and potentially
intractable. We advocate a simpler approach that does not attempt to
predict performance characteristics a priori. Rather, we simply
choose nodes likely to perform well and empirically observe the utility
of our decisions. Of course, this approach may only be appropriate for
a particular class of distributed applications and comes at the cost of
performing more work in absolute terms because certain computations are
repeated. For the case depicted in Figure 10,
approximately 30% of the work is repeated if we assume that the work on
both the fast and slow nodes are run to completion (a pessimistic
assumption as it is typically easy to kill tasks running on slow nodes
once the fast instances complete).
7 Design alternatives
To address potential scalability problems with our centralized approach,
a tree of controllers could be built that aggregates BARRIER_REACHED
messages from children before sending a single message up the
tree [18,37,26]. This tree could be built
randomly from the expected set of hosts, or it could be crafted to match
the underlying communication topology, in effect forming an overlay
aggregation tree [34,36]. In these cases, the master
would send FIRE messages to its children, which would in turn propagate
the message down the tree. One potentially difficult question with this
approach is determining when interior nodes should pass summary
BARRIER_REACH messages to their parent. Although a tree-based approach
may provide better scalability since messages can be aggregated up the
tree, the latency required to pass a message to all participants is
likely to increase since the number of hops required to reach all
participants is greater than in the centralized approach.
A gossip-based algorithm could also be employed to manage barriers in a
fully decentralized manner [2]. In this case, each node
acts as a barrier manager and swaps barrier status with a set of remote
peers. Given sufficient pair-wise exchanges, some node will eventually
observe enough hosts having reached the barrier and it will fire the
barrier locally. Subsequent pair-wise exchanges will propagate the fact
that the barrier was fired to the remainder of the nodes in the system,
until eventually all active participants have been informed.
Alternatively, the node that determines that a barrier should be
released could also broadcast the FIRE message to all participants.
Fully decentralized solutions like this have the benefit of being highly
fault tolerant and scalable since the work is shared equally among
participants and there is no single point of failure. However, since
information is propagated in a somewhat ad hoc fashion, it takes more
time to propagate information to all participants, and the total amount
of network traffic is greater. There is an increased risk of
propagating stale information as well. In our experience, we have not
yet observed significant reliability limitations with our centralized
barrier implementation to warrant exploring a fully decentralized
approach.
We expect that all single-controller algorithms will eventually run into
scalability limitations based on a single node's ability to manage
incoming and outgoing communication with many peers. However, based on
our performance evaluation (see Section 6), the performance
of centralized barriers is acceptable to at least 100 nodes. In fact,
we find that our centralized barrier implementation out-performs an
overlay tree with an out-degree of 10 for 100 total participants with
regards to the time it takes a single message to propagate to all
participants.
8 Related Work
Our work builds upon a number of synchronization concepts in distributed
and parallel computing. For traditional parallel programming on tightly
coupled multiprocessors, barriers [19] form natural
synchronization points. Given the importance of fast primitives for
coordinating bulk synchronous SIMD applications, most MPPs have hardware
support for barriers [23,31].
While the synchronization primitives and requirements for large-scale
networked systems discussed vary from these traditional barriers, they
clearly form one basis for our work. Barriers also form a natural
consistency point for software distributed shared memory
systems [20,6], often signifying the point
where data will be synchronized with remote hosts. Another popular
programming model for loosely synchronized parallel machines is message
passing. Popular message passing libraries such as
PVM [15] and MPI [25] contain
implementations of barriers as a fundamental synchronization service.
Our approach is similar to Gupta's work on Fuzzy Barriers [17]
in support of SIMD programming on tightly coupled parallel processors.
Relative to our approach, Gupta's approach specified an entry point for
a barrier, followed by a subsequent set of instructions that could be
executed before the barrier is released. Thus, a processor is free to
be anywhere within a given region of the overall instruction stream
before being forced to block. In this way, processors completing a
phase of computation early could proceed to other computation that does
not require strict synchronization before finally blocking. This notion
of fuzzy barriers were required in SIMD programs because there could
only be a single outstanding barrier at any time. We can capture
identical semantics using two barriers that communicate state with one
another. The first barrier releases all entering nodes and signals
state to a second barrier. The second barrier only begins to release
nodes once a sufficient number (perhaps all) of nodes have entered the
first barrier.
Our approach to synchronizing large-scale networked systems is related
to the virtual synchrony [2,3] and extended virtual
synchrony [27] communication models. These communication
systems closely tie together node inter-communication with group
membership services. They ensure that a message multicast to a group is
either delivered to all participants or to none. Furthermore, they
preserve causal message ordering [22] between both
individual messages and changes in group membership. This communication
model is clearly beneficial to a significant class of distributed
systems, including service replication. However, we have a more modest
goal: to provide a convenient synchronization point to coordinate the
behavior of more loosely coupled systems. It is important to stress
that in our target scenarios this synchronization is delivered mostly as
a matter of convenience rather than as a prerequisite for correctness.
Any inconsistency resulting from our model is typically detected and
corrected at the application, similar to soft-state optimizations in
network protocol stacks that improve common-case performance but are not
required for correctness. Other consistent group membership/view
advancement protocols include Harp [24] and
Cristian's group membership protocol [8].
Another effort related to ours is Golding's weakly consistent group
membership protocol [16]. This protocol employs gossip
messages to propagate group membership in a distributed system.
Assuming the rate of change in membership is low enough, the system will
quickly transition from one stable view to another. One key benefit of
this approach is that it is entirely decentralized and hence does not
require a central coordinator to manage the protocol. As discussed in
Section 7, we plan to explore the use of a
distributed barrier that employs gossip to manage barrier entry and
release. However, our system evaluation indicates that our current
architecture delivers sufficient levels of both performance and
reliability for our target settings.
Our loose synchronization model is related in spirit to a variety of
efforts into relaxed consistency models for updates in distributed
systems, including Epsilon Serializability [30], the CAP
principle [14], Bayou [32], TACT [38], and
Delta Consistency [33].
Finally, we note that we are not the first to use the arrival rate at a
barrier to perform scheduling and load balancing. In Implicit
Coscheduling [11], the arrival rate at a barrier
(and the associated communication) is one consideration in making local
scheduling decisions to approximate globally synchronized behavior in a
multi-programmed parallel computing environment. Further, the way in
which we use barriers to reallocate work is similar to methods used by
work stealing schedulers like CILK [5]. The fundamental
difference here is that idle processors in CILK make local decisions to
seek out additional pieces of work, whereas all decisions to reallocate
work in our barrier-based scheme are made centrally at the barrier
manager.
9 Summary
Partial barriers represent a useful relaxation of the traditional
barrier synchronization primitive. The ease with which we were able
to integrate them into three different existing distributed
applications augurs well for their general utility. Perhaps more
significant, however, was the straightforward implementation of
wide-area MapReduce as enabled by our expanded barrier semantics. We
are hopeful that partial barriers can be used to bring to the wide area
other sophisticated parallel algorithms initially developed for
tightly coupled environments. In our work thus far, we find in many
cases it may be as easy as directly replacing existing synchronization
primitives with their relaxed partial barrier equivalents.
Dynamic knee detection in the completion time of tasks in
heterogeneous environments is also likely to find wider application.
Being able to detect multiple knees has added benefits since
many applications exhibit multi-modal distributions. Detecting
multiple knees gives applications more control over reconfigurations
and increases overall robustness, ensuring forward progress even in
somewhat volatile execution environments.
- 1
-
D. G. Andersen, H. Balakrishnan, and F. Kaashoek.
Improving Web Availability for Clients with MONET.
In NSDI, 2005.
- 2
-
K. Birman.
Replication and Fault-Tolerance in the ISIS System.
In SOSP, 1985.
- 3
-
K. Birman and T. Joseph.
Exploiting Virtual Synchrony in Distributed Systems.
In SOSP, 1987.
- 4
-
K. P. Birman.
The Process Group Approach to Reliable Distributed Computing.
CACM, 36(12), 1993.
- 5
-
R. D. Blumofe, C. F. Joerg, B. C. Kuszmaul, C. E. Leiserson, K. H. Randall, and
Y. Zhou.
Cilk: an efficient multithreaded runtime system.
In PPOPP, 1995.
- 6
-
M. Z. Brian Bershad and W. Sawdon.
The Midway Distributed Shared Memory System.
In CompCon, 1993.
- 7
-
Computing TCP's Retransmission Timers (RFC).
https://www.faqs.org/rfcs/rfc2988.html.
- 8
-
F. Cristian.
Reaching Agreement on Processor-Group Membership in Synchronous
Distributed Systems.
DC, 4(4), 1991.
- 9
-
J. Dean and S. Ghemawat.
MapReduce: Simplified Data Processing on Large Clusters .
In OSDI, 2004.
- 10
-
E. Dijkstra.
The Structure of the ``THE''-Multiprogramming System.
CACM, 11(5), 1968.
- 11
-
A. C. Dusseau, R. H. Arpaci, and D. E. Culler.
Effective Distributed Scheduling of Parallel Workloads.
In SIGMETRICS, 1996.
- 12
-
EMAN.
https://ncmi.bcm.tmc.edu/EMAN/.
- 13
-
I. Foster, C. Kesselman, J. Nick, and S. Tuecke.
The Physiology of the Grid: An Open Grid Services Architecture for
Distributed Systems Integration.
GGF, 2002.
- 14
-
A. Fox and E. Brewer.
Harvest, Yield, and Scalable Tolerant Systems.
In HotOS, 1999.
- 15
-
G. A. Geist and V. S. Sunderam.
Network-based concurrent computing on the PVM system.
C- P&E, 4(4):293-312, 1992.
- 16
-
R. Golding.
A Weak-Consistency Architecture for Distributed Information
Services.
CS, 5(4):379-405, Fall 1992.
- 17
-
R. Gupta.
The Fuzzy Barrier: A Mechanism for High Speed Synchronization of
Processors.
In ASPLOS, 1989.
- 18
-
R. Gupta and C. R. Hill.
A scalable implementation of barrier synchronization using an
adaptive combining tree.
IJPP, 18(3):161-180, 1990.
- 19
-
H. F. Jordan.
A Special Purpose Architecture for Finite Element Analysis.
In ICPP, 1978.
- 20
-
P. Keleher, S. Dwarkadas, A. L. Cox, and W. Zwaenepoel.
TreadMarks: Distributed Shared Memory on Standard Workstations and
Operating Systems.
In USENIX, pages 115-131, 1994.
- 21
-
D. Kostic, A. Rodriguez, J. Albrecht, and A. Vahdat.
Bullet: High bandwidth data dissemination using an overlay mesh.
In SOSP, 2003.
- 22
-
L. Lamport.
Time, Clocks, and the Ordering of Events in a Distributed System.
CACM, 21(7), 1978.
- 23
-
C. E. Leiserson, Z. S. Abuhamdeh, D. C. Douglas, C. R. Feynman, M. N. Ganmukhi,
J. V. Hill, W. D. Hillis, B. C. Kuszmaul, M. A. S. Pierre, D. S. Wells, M. C.
Wong-Chan, S.-W. Yang, and R. Zak.
The network architecture of the Connection Machine CM-5.
JPDC, 33(2):145-158, 1996.
- 24
-
B. Liskov, S. Ghemawat, R. Gruber, P. Johnson, L. Shrira, and M. Williams.
Replication in the Harp file system.
In SOSP, 1991.
- 25
-
Message Passing Interface Forum.
MPI: A message-passing interface standard.
Technical Report UT-CS-94-230, 1994.
- 26
-
S. Moh, C. Yu, B. Lee, H. Y. Youn, D. Han, and D. Lee.
Four-ary tree-based barrier synchronization for 2d meshes without
nonmember involvement.
TC, 50(8):811-823, 2001.
- 27
-
L. E. Moser, P. M. Melliar-Smith, D. A. Agarwal, R. K. Budhia, and C. A.
Lingley-Papadopoulos.
Totem: A Fault-Tolerant Multicast Group Communication System.
CACM, 39(4), 1996.
- 28
-
L. Peterson, T. Anderson, D. Culler, and T. Roscoe.
A Blueprint for Introducing Disruptive Technology into the
Internet.
In HotNets, 2002.
- 29
-
Plush.
https://plush.ucsd.edu.
- 30
-
C. Pu and A. Leff.
Epsilon-Serializability.
Technical Report CUCS-054-90, Columbia University, 1991.
- 31
-
S. L. Scott.
Synchronization and Communication in the T3E Multiprocessor.
In ASPLOS, 1996.
- 32
-
D. B. Terry, M. M. Theimer, K. Petersen, A. J. Demers, M. J. Spreitzer, and
C. H. Hauser.
Managing Update Conflicts in Bayou, a Weakly Connected Replicated
Storage System.
In SOSP, 1995.
- 33
-
F. Torres-Rojas, M. Ahamad, and M. Raynal.
Timed Consistency for Shared Distributed Objects.
In PODC, 1999.
- 34
-
R. van Renesse, K. Birman, and W. Vogels.
Astrolabe: A Robust and Scalable Technology for Distributed System
Monitoring, Management, and Data Mining.
TCS, 21(2), 2003.
- 35
-
M. Welsh, D. E. Culler, and E. A. Brewer.
SEDA: An Architecture for Well-Conditioned, Scalable Internet
Services.
In SOSP, 2001.
- 36
-
P. Yalagandula and M. Dahlin.
A Scalable Distributed Information Management System.
In SIGCOMM, 2004.
- 37
-
J.-S. Yang and C.-T. King.
Designing tree-based barrier synchronization on 2d mesh networks.
TPDS, 9(6):526-534, 1998.
- 38
-
H. Yu and A. Vahdat.
Design and Evaluation of a Continuous Consistency Model for
Replicated Services.
In OSDI, 2000.
Loose Synchronization for Large-Scale Networked Systems
This document was generated using the
LaTeX2HTML translator Version 2002-2-1 (1.71)
Copyright © 1993, 1994, 1995, 1996,
Nikos Drakos,
Computer Based Learning Unit, University of Leeds.
Copyright © 1997, 1998, 1999,
Ross Moore,
Mathematics Department, Macquarie University, Sydney.
The command line arguments were:
latex2html -split 0 -show_section_numbers -local_icons paper-html.tex
The translation was initiated by Jeannie Albrecht on 2006-04-18
Jeannie Albrecht
2006-04-18
|

