| ||||||||||||||||||||||||||||||||||||||||||||||||||||
|
OSDI '04 Paper
[OSDI '04 Technical Program]
Boxwood: Abstractions as the Foundation for Storage InfrastructureJohn MacCormick, Nick Murphy, Marc Najork, Chandramohan A. Thekkath, and Lidong Zhou Microsoft Research Silicon Valley
AbstractWriters of complex storage applications such as distributed file systems and databases are faced with the challenges of building complex abstractions over simple storage devices like disks. These challenges are exacerbated due to the additional requirements for fault-tolerance and scaling. This paper explores the premise that high-level, fault-tolerant abstractions supported directly by the storage infrastructure can ameliorate these problems. We have built a system called Boxwood to explore the feasibility and utility of providing high-level abstractions or data structures as the fundamental storage infrastructure. Boxwood currently runs on a small cluster of eight machines. The Boxwood abstractions perform very close to the limits imposed by the processor, disk, and the native networking subsystem. Using these abstractions directly, we have implemented an NFSv2 file service that demonstrates the promise of our approach.
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
The Boxwood B-tree module is a distributed implementation of
Sagiv's [28] B-link tree algorithm, which is a variant of
the Lehman-Yao B-link tree algorithm [22].
Sagiv's algorithm has the desirable property that locking is
considerably simplified from traditional B-tree algorithms without
compromising concurrency or atomicity.
Sagiv's original B-link tree algorithm (like its classic ![]() -tree,
-tree,
![]() -tree, or
-tree, or ![]() -tree counterparts) runs in a single machine
environment, uses locks for synchronizing accesses amongst multiple
threads, and stores data either in memory or persistently on
disk. Sagiv's algorithm is well suited for a distributed implementation,
an observation independently made by Johnson and Colbrook [16].
-tree counterparts) runs in a single machine
environment, uses locks for synchronizing accesses amongst multiple
threads, and stores data either in memory or persistently on
disk. Sagiv's algorithm is well suited for a distributed implementation,
an observation independently made by Johnson and Colbrook [16].
Since the algorithm to implement the B-link tree can already deal with thread concurrency within a single machine, our design extends this design to multiple machines by ensuring two simple constraints are met:
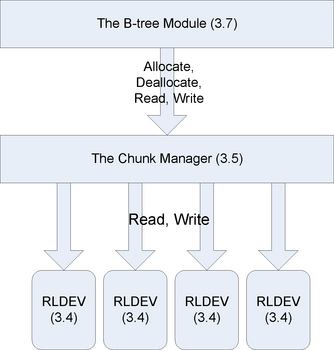
The chunk manager carves out chunks of storage by using the services of a lower layer called the replicated logical device (RLDev) layer. Each RLDev provides access to a fixed amount of chain-declustered storage. An RLDev is implemented on two machines using two separate physical disk drives for replication.
This section describes the design of the various components of the Boxwood system in more detail. Since there are several interdependencies amongst these components, we describe them in an order that minimizes forward references.
Boxwood depends on three different types of client states maintained within Paxos. Each client state typically refers to the essential state required by an internal Boxwood service such as the lock service, or the RLDev layer, or the chunk manager. This state is consulted by each service as appropriate to perform recovery or reconfiguration of that layer. Typically, the state includes the machines, disks, and other resources like network port identifiers used by the client.
The Paxos service is implemented on a small collection of machines,
typically three, with two machines constituting a quorum or majority.
We do not dedicate an entire machine to implementing the service;
the Paxos service instance on a machine is restricted to a
single server process. Paxos state is maintained on
disks that are locally attached to the machines hosting the
server. We do not rely on these disks to
be fault tolerant, but merely that they are persistent. The failure of
the disk storage or the machine is considered as a failure of the
Paxos server. Our choice of three machines is arbitrary; it allows us
to tolerate the failure of one machine in our small cluster. We can tolerate
the failure of ![]() machines by running the service on
machines by running the service on ![]() machines.
machines.
We draw a clear distinction between the characteristics of the Paxos service and the characteristics of the rest of the storage- and abstraction-related services. We have isolated the scaling of the overall system from the scaling of Paxos. Client state stored on Paxos can be dynamically changed with the addition of new RLDevs, new chunk managers, new machines, or new disks. This does not require us to dynamically change the number of Paxos servers that store the state. It is conceivable that at extremely large scales, we might wish to increase on the fly the number of Paxos servers in the system to guard against increased machine failures. If so, we will need to implement the protocols necessary to increase or decrease dynamically the number of Paxos servers per se.
We ensure that Paxos is only involved when there are failures in the system or there are reconfigurations of the system. This allows us to avoid overloading the servers for the common case operations such as reads and writes, which need to complete quickly.
We implement a slightly restricted form of Paxos by decreasing the degree of concurrency allowed. In standard Paxos, multiple decrees can be concurrently executed. In our system, we restrict decrees to be passed sequentially. This makes the implementation slightly easier without sacrificing the effectiveness of the protocol for our purposes.
To ensure liveness properties in a consensus algorithm like Paxos, it can be shown that it is only necessary to use a failure detector with fairly weak properties [5]. In principle, we too only need such a weak failure detector. However, we need failure detectors with stronger guarantees for our RPC and lock server modules. Rather than implement multiple failure detection modules, we use a single one with more restrictions than those required by Paxos.
Our failure detection module is implemented by having machines exchange periodic keepalive beacons. Each machine is monitored by a collection of observer machines with which it exchanges keepalive messages. A machine can check on the status of any machine by querying the observers. A machine is considered failed only when a majority of the observer machines have not heard keepalive messages from it for some threshold period. The invariants we maintain are that, (a) if a machine dies, the failure detector will eventually detect it, and that, (b) if the failure detector service (not to be confused with an individual observer) tells a client that a machine is dead, then that machine is indeed dead.
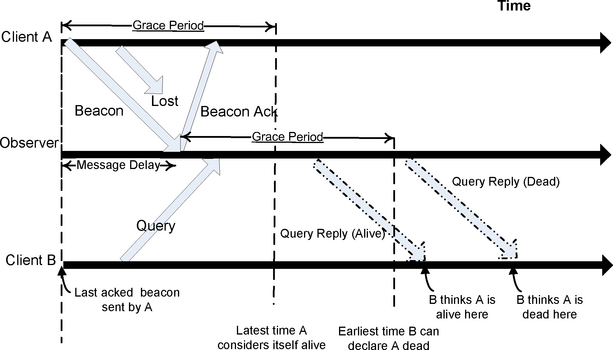
Figure 2 sketches the message protocol assuming a single observer, rather than a majority. Our messages are sent using UDP and may fail to arrive or arrive out of order, albeit with very low probability on a LAN. We do not assume a synchronized clock on each machine, but we do assume that the clocks go forwards, the clock drift on the machines is bounded, and UDP message delays are non-zero.
A client (Client A in the
figure) periodically (at intervals of ![]() T) sends out beacon
messages to the observer. These messages may or may not be delivered
reliably. The observer echoes each beacon message it receives back to
the client. At any point in time, the observer considers a client dead
if it has not received a beacon from the client in the preceding GracePeriod. The client considers the receipt of the echo as an
acknowledgement from the observer. The client keeps track of the last time
it sent a beacon that was acknowledged by the observer. If
more than GracePeriod time elapses without an acknowledgement,
it considers itself dead and kills itself.
T) sends out beacon
messages to the observer. These messages may or may not be delivered
reliably. The observer echoes each beacon message it receives back to
the client. At any point in time, the observer considers a client dead
if it has not received a beacon from the client in the preceding GracePeriod. The client considers the receipt of the echo as an
acknowledgement from the observer. The client keeps track of the last time
it sent a beacon that was acknowledged by the observer. If
more than GracePeriod time elapses without an acknowledgement,
it considers itself dead and kills itself.
|
Another client (Client B in the figure) that wishes to monitor the first client (Client A) sends a query message to the observer. The observer then sends B its view about A. If B receives a reply from the observer claiming A is dead, it considers A dead; otherwise it considers A alive. Given our assumptions about clock drift and non-zero message delay, this protocol is conservative and maintains our invariants.
In reality, we don't use a single observer, but use a collection of observers for reasons of fault-tolerance. In this case, client B in the figure pronounces A dead only if it gets replies from a majority of observers (instead of the observer) that all pronounce A dead. If B does not receive a majority of responses that pronounce A dead, it assumes that A is alive. A, on the other hand, considers itself dead as soon as GracePeriod time elapses without an acknowledgement from a majority. This protocol can lead to a state where A considers itself dead, while B thinks A is alive. But more to the point, if B thinks A is dead (because a majority pronounces A dead), then A cannot have received an acknowledgement from a majority, and will consider itself dead. This maintains our invariant that if B considers A dead (because the failure detector said so), then A must be dead.
Our protocol, as sketched, only works if clients that die do not get resurrected later and start sending beacons. We ensure this in practice by having each client use a monotonically increasing incarnation number each time it has a transient failure.
The values of GracePeriod, ![]() T, and the number of
observers are tunable parameters. We have found one second, 200 ms,
and three to be suitable in our environment. We use the same observer
machines for all the clients in the system for convenience, although
it is feasible to use different subsets of machines as observers for
each specific client.
T, and the number of
observers are tunable parameters. We have found one second, 200 ms,
and three to be suitable in our environment. We use the same observer
machines for all the clients in the system for convenience, although
it is feasible to use different subsets of machines as observers for
each specific client.
The lock service provides a simple general purpose locking mechanism that allows its clients to acquire multiple-reader single-writer locks. Our design borrows techniques used in earlier work [4,6,12,32]; we describe the details of our scheme to underscore our rationale for particular choices.
Locks are uniquely identified by byte arrays on which the lock service does not impose any semantics. Although locks have no explicit timeouts associated with them, the failure detector is used to time out unresponsive clients. So in essence, our locks act as degenerate leases [12].
Clients of the lock service have a clerk module linked into their address spaces. Leases are cached by the clerk and are only revoked by the service if there is a conflicting request by another clerk. A clerk blocks an incoming revocation request until all currently outstanding local uses of the lease have completed. An optimization, which we don't currently support, is for the clerk to release a lease when it has not used it for some time.
Clients can optionally arrange with the lock service to call a recovery function on another instance of the same client if the first instance were to fail. The lock service guarantees that the leases acquired by a client that has subsequently failed will not be released until this recovery is successfully completed. This is a modest extension to Gray and Cheriton's standard lease mechanism (which primarily focused on write-through client caching) to deal with residual state that exists in a client after the lease has timed out. An example of such usage can be found in the B-tree module described in Section 3.7.
The failure of a lock client is determined by the failure detector. Notice that for our scheme to work correctly, both the client and the lock service must use the failure detector in a consistent fashion. Otherwise, the lock service could revoke the lease, while the client believed it had the lease. We ensure correct behavior by requiring two conditions of our failure detector. First, if a client dies, then the failure detector will eventually notice that it is dead. Second, if the failure detector claims that a client is dead, then the client must have died some time prior (but perhaps is alive now if it was a transient failure). We also ensure that a client that comes alive and finishes recovery always assumes that it holds no leases and registers with the lock service.
For fault-tolerance, the lock service consists of a single master server and one or more slave servers running on separate machines. In our cluster, we typically use only a single slave server, but if multiple machine failures are common, additional slaves can be used. Only the master server, whose identity is part of the global state in Paxos, hands out leases. The lock service also keeps the list of clerks as part of its Paxos state.
If the failure detector pronounces the current master dead, the slave takes over after passing a Paxos decree that changes the identity of the current master. The new master recovers the lease state by first reading Paxos state to get a list of clerks. Then it queries the clerks for their lease state. It is possible that some of the clerks are dead at this point. In this case, the lock service calls recovery on behalf of these clients on the clients that are alive, and considers all leases held by the dead clients as free. If no recovery procedure has been established for a dead client, the lock service considers all leases held by that client as free.
Lock service clerks query Paxos to determine the identity of the master server. This information is cached until an RPC to the currently master returns an exception, at which point it is refreshed. RPCs to a machine return an exception if the failure detector claims the target is dead.
The lock service fails if all (both) servers fail. Clients cannot make forward progress until it is re-established.
We use a simple master-slave design for the lock service because we believe other more elaborate, scalable schemes are unnecessary in most storage-centric environments. Our rationale is that even in elaborate schemes with several active lock servers, a specific lock will be implemented by a single lock server at any given time. If this is a highly contended lock, then lock contention due to data sharing becomes a performance problem on the clients long before the implementation of the lock server itself becomes a bottleneck. Our experience with deploying Petal/Frangipani, which had a more scalable lock service, seems to bear this out.
We chose to implement replication at a fairly low level in the abstraction hierarchy for two principal reasons. First, by providing replication at a low level, all higher layers, which are typically more complex in nature, can depend on fault-tolerant storage, which makes the logic of the higher layers simpler to reason about. For instance, our implementation of the chunk manager (to be described in Section 3.5) was considerably easier because of the RLDev layer. Second, by replicating at a low level of abstraction, the relevant replication, mapping, and failover logic, as well as internal data structures, can be made simple.
RLDevs implement chained declustering. A single RLDev is of fixed size and consists of two segments of equal size located on disks on two different machines. A single disk will contain segments from multiple RLDevs. The list of RLDevs, the segments belonging to them, the identity of machines that host the primary and the secondary segments, and the disks are all part of the global state maintained in Paxos. If an RLDev is added or if the locations of the segments belonging to an RLDev are changed, a Paxos decree must be passed.
The replication protocol is fairly standard. One replica is designated the primary, and the other the secondary. On initialization, a replica reads its state from the Paxos service and monitors its peer using the failure detector. When both replicas are up, writes are performed on both and reads on either. A client sends write requests to the primary, which forwards the request to the secondary and waits for completion.
Clients of the RLDev use hints to determine where the replicas are located. Hints can sometimes be wrong and can be updated by reading the Paxos state. An RLDev clerk linked in with the clients handles the details of dealing with hints and refreshing them as appropriate.
When one of the replicas dies, the surviving replica continues to accept writes (and reads). We call these degraded mode writes because the system is accepting new data but not replicating it on the dead replica. A subsequent failure of the surviving replica (the one that has accepted the degraded mode data) before the first replica has finished recovering will lead to data loss. Before it accepts these ``degraded mode'' writes, the survivor passes a decree to that effect so that if the dead replica were to come back after a transient failure, it knows to reconcile its stale data, and more importantly, not to accept new reads or writes if it cannot reconcile its stale data. This can happen because the replica that was working in ``degraded mode'' now happens to be dead. All blocks that have degraded mode writes on them are put in a log (called the degraded mode log) so that reconciliation is fast and only involves the affected blocks.
Notice that in the worst case, the entire segment could have been written in degraded mode. Thus, when a previously dead replica comes up, we have to be prepared to copy the entire segment. We can leverage this mechanism to implement the automatic reconfiguration of an RLDev. By a reconfiguration operation, we mean the redistribution of the data in an RLDev to a different disk and/or machine to enable load balancing. Making an RLDev relatively small makes it easy to copy its data quickly on a high-bandwidth LAN link, thereby cutting down reconfiguration time.
As mentioned previously, when both replicas are up, the primary waits for the secondary to commit the write before returning to the client. In order to cope with a transient failure when the writes are in flight, an RLDev implements a dirty region log, which serves a different purpose than the degraded mode log mentioned previously. The dirty region log on the primary keeps track of writes that are in flight to the secondary. When the secondary replies, the log entry can be removed from the primary in principle. To recover from a transient failure, the primary consults its dirty region log to determine the writes that were in flight and sends the secondary the current contents of its disks for these writes.
In cases where the client can deal with the two replicas differing after a crash, RLDevs allow the client to turn off the dirty region log. Such clients must explicitly read and write each replica to reconcile the differences after a crash. In Boxwood, all such clients already maintain a log for other reasons, and there is no added cost for maintaining the equivalent of the dirty region information, except a modest violation in layering. We felt this tradeoff was justified for the performance gain of saving an additional disk write.
Recovering an RLDev is fairly straightforward. There are two failure cases: a permanent failure of a disk or the transient failure of processor and its attached disks. When there is a permanent disk failure, the RLDevs that are hosted on that disk must be reconstituted on a new (or perhaps more than one) disk, but the recovery of each RLDev proceeds independently. An RLDev recovering from a permanent disk failure contacts the RLDev on the machine that hosts its surviving segment and copies the contents of the entire segment. In contrast, if the failure was transient, then the data retrieved from the peer is limited to any degraded mode writes the peer has for the recovering segment. After degraded mode writes have been applied on the recovering segment, the dirty region log of the surviving segment is read and sent to the recovering server to apply any in-flight writes. When the recovering segment is up to date, the recovering server passes another Paxos decree indicating that the state of the RLDev is normal and stops recording degraded mode writes.
The fundamental storage unit in Boxwood is the chunk. A chunk is a sector-aligned sequence of consecutive bytes on an RLDev, allocated in response to a single request. Every chunk is identified by an opaque handle that is globally unique in the system.
Chunks are managed by the chunk manager module, which supports four operations: allocate, deallocate, read, and write. Deallocated handles are guaranteed never to be reused. Reading or writing an unallocated handle raises an exception.
Since an RLDev can be accessed by any machine with a suitable clerk linked in, it is possible, in principle, to have any chunk manager allocate chunks from any RLDev. In fact, as long as a single chunk manager is alive, we can manage all the RLDevs that are non-faulty. However, for simplicity, ease of load balancing, and performance, we designate a pair of chunk managers running on two different machines to manage space from a given set of RLDevs. Typically, these RLDevs will have their primary and secondary segments located on disks that are local to the two chunk managers. This reduces the number of network hops required to perform chunk operations. One of the pair of chunk managers acts as the primary initiating all allocations and deallocations, while either can perform reads and writes.
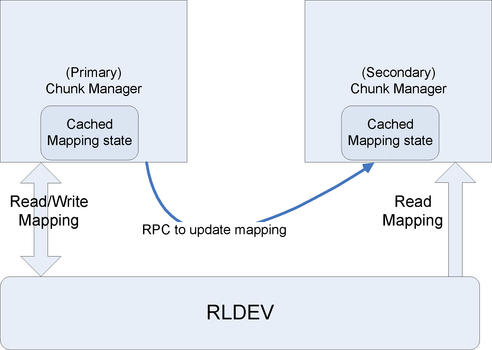
The mapping between the opaque handle and the RLDev offset is replicated persistently on RLDevs. This mapping information is accessed often: an allocate call requires a new mapping to be created; a deallocate call deletes the mapping; reads and writes require this mapping to be consulted. We therefore cache the mapping on both the primary and the secondary.
A map lock from the lock service protects mappings. Only the primary makes changes to the mappings; this lock is therefore always cached on the primary in exclusive mode. When the primary changes the mappings, it writes the new mapping to the RLDev and sends an RPC to the secondary, which directly updates its cached copy of the mappings without acquiring the lock.
On startup, the secondary has to read the latest mapping state from the RLDev so that subsequent RPCs from the primary can update it correctly. In order to get the latest state from the RLDev, the secondary acquires the map lock in shared mode, reads the mapping from the RLDev, releases the lock, and never acquires it again. The primary, on the other hand, always acquires the map lock in exclusive mode before making mapping changes. The ordinary locking mechanism will then ensure the consistency of the data.
If the primary dies, the secondary will notice it via the failure detector, whereupon it acquires the map lock in exclusive mode and acts as a primary. If the secondary dies, the primary will also detect it via the failure detector. It continues to update the mappings on the RLDev, but does not make RPCs until it gets a revocation for the map lock indicating that the secondary has come alive and wants to read the state.
Our design of the chunk manager is very simple, largely because of our decisions to (a) implement replication below the level of the chunk manager, and (b) use the locking service to do the failover.
Figure 3 shows the relationship of the chunk manager and the RLDev layer.
|
An opaque handle consists of a 32-bit chunk manager identifier and a 64-bit handle identifier. A chunk manager identifier corresponds to a pair of chunk managers. The locations of the primary and secondary chunk manager, which may change over time, are maintained in Paxos and cached by the chunk manager clerk. The clerk uses this mapping to direct chunk requests to an appropriate manager. If the cache is out of date, there is no correctness issue with misdirecting the RPC because the incorrect chunk manager will return an error, which causes the clerk to refresh its mappings.
The translation of the handle identifier to the RLDev is performed by the chunk manager responsible for the handle. It consults its cached mapping table to translate to the RLDev offset. It then invokes the RLDev clerk, which accesses the physical disks as necessary. In most cases, at least one segment of the RLDev will be on a local disk, so accesses incur little network overhead.
The chunk manager module guarantees that an opaque handle is never reused. It enforces this condition by never reusing a handle identifier once it is deallocated. The 64-bit identifier in our current implementation seems adequate for this purpose; but we may reconsider that decision after we gain more experience with the system.
The mapping between handles and disk offsets is stored as stable state on an RLDev. The state on the RLDev consists of a checkpoint and a separate list of incremental changes that have not been applied to the checkpoint. The list is updated synchronously whenever the mapping changes, but the checkpoint is only accessed infrequently. We periodically apply the changes in the list to the checkpoint and truncate the list.
Recovering the chunk manager is simple as long as the RLDev holding the stable state is available. The primary chunk manager applies the list of incremental changes to the current checkpoint to get the updated state, which it caches in memory and stores stably on disk. Then it truncates the list and is ready to service new requests. Since the chunk manager depends on the RLDev for its recovery, the RLDevs have to be recovered first.
Our transaction system does not provide isolation guarantees; instead clients explicitly take out locks using the lock server. Clients do deadlock avoidance by using lock ordering. With the current set of clients in our system, deadlock avoidance is the more attractive alternative to providing deadlock detection as in a traditional transaction system.
The B-link tree, together with algorithms for efficient concurrent operations, was first introduced by Lehman and Yao [22], and significantly improved by Sagiv [28]. Sagiv's algorithms require no locks for lookups. Insertions require only a single lock held at a time even if the insertions cause node splits at many levels of the tree. Each lock protects a single tree node that is being updated. Deletions are handled like insertions, and hold a single lock on the updated node. Thus, these operations are provably deadlock free. Deletions can leave a node empty or partially empty; and such nodes are fixed up as a separate activity by one or more background compression threads. Each compression thread must lock up to three nodes simultaneously. Each B-link tree operation provides all ACID properties when only a single tree is involved. ACID properties across multiple trees must be maintained by clients using the transaction and locking services described earlier.
We implement a distributed version of Sagiv's algorithm in a conceptually simple fashion by using the global lock server instead of simple locks, and by using the chunk manager for storage instead of ordinary disks. Each instance of the B-tree module maintains a write-ahead log on an RLDev.
Recovering the B-tree service is done by replaying the write-ahead log. The records in the log refer to handles implemented by the chunk manager. Thus, before the B-tree service can be recovered, both the RLDev service and the chunk manager must be available. If a B-tree server were to crash, the active log records (i.e., records for those operations that haven't made it to disk) will be protected by leases. When the leases expire, the lock service will initiate recovery using some other B-tree server and the write-ahead log. (Recall from Section 3.3 that clients of the lock service can designate a recovery function to be invoked on lease expiration, when the lock service will consider the client as having failed.) When recovery is complete, the expired leases are made available for other servers to acquire. It is possible that all B-tree servers are dead, in which case, the lock server will not be able to call recovery on any machine when the leases expire. It therefore defers the recovery until the first B-tree server registers with it, at which point all server logs will be replayed before any new leases are handed out.
Each machine executes the Boxwood software, which runs as a user-level process on a Windows Server 2003 kernel. The failure detector observers, the Paxos service, and the lock service run as separate processes; the rest of the layers are available as libraries that can be linked in by applications. Boxwood software is written in C#, a garbage-collected, strongly typed language, with a few low-level routines written in C.
The networking subsystem provided by the kernel is capable of transmitting data at 115 MB/sec using TCP. Using a request response protocol layered on TCP, our RPC system can deliver about 110 MB/sec.
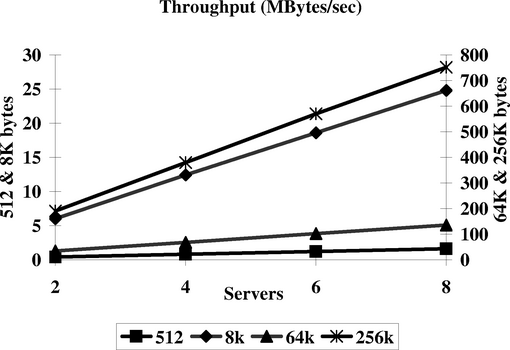
Table 1 shows the performance of replicated random writes and reads in the smallest (two machine) configuration. All the write accesses made by the benchmark are to RLDevs where the primary server is local. Thus, each write will result in a local disk write and an RPC to a remote server to update the mirror. All read accesses are made to a remote RLDev server. CPU utilization represents the average CPU usage on each server. We constrain the kernel disk access routines to allow only a single outstanding request per disk. This represents the most pessimistic performance.
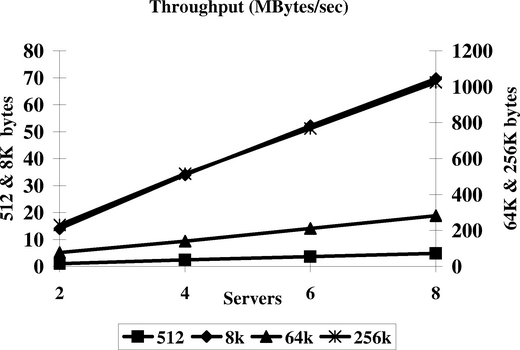
Figures 4 and 5 show the scaling as the number of servers is increased from 2 to 8. Read are slightly faster than writes in general. This is because the disk inherently has slightly better (about 5%) read performance than write according to the manufacturer's specification sheet. At small packet sizes, the throughput is limited by disk latency. For large packet sizes, we get performance close to the RPC system imposed limit. In all cases, we observe good scaling.
We next discuss the performance of the chunk manager. The read and write performance of the chunk manager closely matches the performance of the RLDev described above and is not repeated here. We instead describe the performance impact of allocations and deallocations. Our chunk manager implements a performance optimization that defers some of the work of an allocation to a later time. When possible, we log the allocation locally on the client, but avoid an RPC to the server. A whole set of allocation requests are subsequently sent in a batch to the server.
|
Table 2 shows the performance effect as the amount of batching is varied. As part of allocating a handle, the storage allocated for it is zeroed out on disk. Thus allocation costs will vary somewhat with chunk size; we show a typical size of 8KB. For single allocations (i.e., with no batching), the latency cost is high. This is because we require three RLDev writes to stably record the new mapping. However, batching is very effective even at small numbers; we typically more than a dozen allocations that can be batched in our tests.
Deallocations are somewhat easier than allocations. The cost of a single deallocation as seen by a client is about 5.3 milliseconds and is independent of the number of servers. In addition, if a handle whose allocation request has not yet been sent to the server is deallocated, we can avoid making both operations at the server. This brings the time down even further.
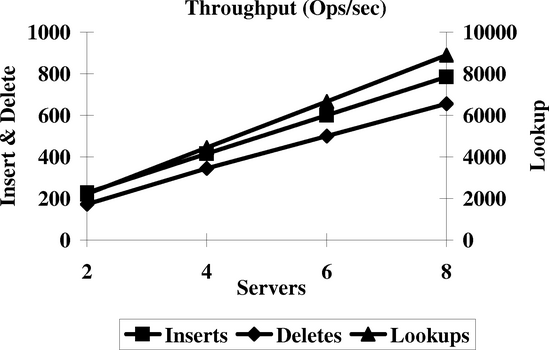
We report on the performance of two sets of experiments for the B-tree. In the first experiment we have a number of machines each inserting keys into a separate B-tree. In a subsequent phase, each machine looks up these keys and in a final phase deletes them. Before each of the three phases, all entries in the B-tree caches are evicted. Since the B-trees are private, there is no lock contention, but there is contention for storage on the underlying RLDevs, which are evenly distributed across all machines.
|
Figure 6 reports on the aggregate steady state throughput across all machines. For all phases, we observe good scaling within experimental error. This is not surprising since there is no contention for the locks, and the RLDev performance is known to scale from Figures 4 and 5.
|
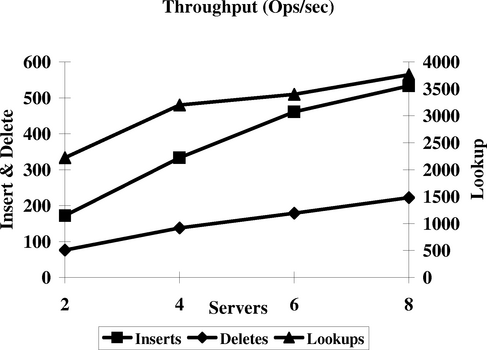
We next study the performance of B-tree operations under contention. In this experiment, we redo the previous experiment but use a single B-tree that all machines contend for. To avoid the extreme case where every insertion contends for a global lock, we partition the keys so that each client acts on a disjoint region of the key space. This arrangement still leads to lock contention in the upper levels of the tree. Once again we perform three phases with cold caches. Figure 7 shows the aggregate throughput across all machines. Under contention, the performance of the B-link operations tends to flatten relative to Figure 6. Also, relative to the first experiment, the size the shared tree is proportionately larger in the second experiment. This leads to lowered hit rates in the cache, which slows the performance of lookups in the second case.
In general, the performance of B-trees is dependent on several parameters, which include the branching factor, the distribution of keys, and the size of the keys and data. We have not yet done an exhaustive characterization of our B-tree module at various parameter values. The particular trees we measure have 10-byte keys and data and each tree node has a branching factor of 6.
The previous sections showed the functional characteristics of Boxwood's abstractions. To test these abstractions, we built BoxFS: a file system using Boxwood B-trees, exported using the NFS v2 protocol. It runs at user-level and directly or indirectly depends on all the services described earlier.
BoxFS implements a conventional file system containing directories, files, and symbolic links. Each of these is stored as a Boxwood B-tree. Each tree contains a single well-known distinguished key to hold attributes such as access times, protection and owner information similar to a UNIX inode. In addition, directories, files, and symbolic links also have regular keys as described below.
A B-tree storing a directory is keyed by the name of the file, directory, or symbolic link. The data corresponding to the key refers to a byte array that is the on-wire representation of the NFS file handle. The NFS file handle is not interpreted by the client, but BoxFS stores in it bookkeeping information including the B-Tree handle that represents the file, directory, or symbolic link.
A B-tree storing a file is keyed by block number. The data corresponding to the key is an opaque chunk handle. The actual data in the file is stored in the chunk as uninterpreted bytes. Our usage of B-trees for directories and chunks for file data is consistent with the idea that strict atomicity guarantees are needed in the file system metadata, but not in the file user data. Alternatively, we could have stored user data as part of the file B-tree, but every file write would translate into a relatively expensive B-tree insert operation, with attendant overheads of redo and undo logging.
A B-tree storing a symbolic link is a degenerate tree containing a single special key and the byte array referring to the target of the link.
Obviously, all the B-trees are maintained via Boxwood B-tree operations -- and any single such operation has all the ACID properties even when the same B-tree is simultaneously being accessed by different machines. However, many file system operations require multiple B-tree operations to be performed atomically. For example, a rename operation requires the combination of a delete from one B-tree and an insertion into another B-tree to be atomic. This atomicity is achieved using the transaction service described in Section 3.6. But as we explained earlier, clients have to provide isolation guarantees themselves. BoxFS ensures isolation by acquiring locks on the appropriate file system objects from the Boxwood lock service in a predefined lock order. After the locks are acquired, it performs the required operation as part of a transaction, commits, and releases the locks.
All B-tree operations benefit from the B-tree cache built into Boxwood's B-tree module. In contrast, file data is not stored in B-trees; it is accessed via the chunk manager interface and requires a separate cache within BoxFS. This cache is kept coherent by acquiring the appropriate shared or exclusive lock from the Boxwood lock service for every data read or write.
Typical file operations that do not involve user file data access result in one or more B-tree operations encapsulated within a single transaction. These B-tree operations will generate log entries that are committed to the log when the transaction commits. Where possible the transaction system will do a group commit. In any event, a single transaction commit will cause only a single disk write in the usual case unless the log is full. The actual B-tree nodes that are modified by the transaction will remain in the B-tree's in-core cache and do not make it to disk. Thus, BoxFS can perform metadata intensive file operations efficiently.
BoxFS makes three simplifying assumptions to achieve acceptable performance. We do not believe these assumptions materially affect the usability of our system or the validity of our hypothesis that it is easy to build file systems given higher-level abstractions. By default, the data cache is flushed once every 30 seconds, which is not strictly in accordance with NFS v2 semantics. Also, the B-tree log that contains the metadata operations is flushed to stable storage with the same periodicity. Thus, file system metadata is consistent, but we could lose 30 seconds of work if a machine crashes. Finally, we do not always keep the access times on files and directories up to date.
The BoxFS system runs on multiple machines simultaneously and exports the same file system. The file system is kept consistent by virtue of the distributed lock service. However, since we are exporting the file system using the NFS protocol, clients cannot fully exploit the benefits of coherent caching.
Locking in BoxFS is quite fine-grained. Since all file system metadata is stored as key-data pairs in a B-tree, metadata modifications made by different machines are automatically locked for consistency by the B-tree module through the global lock server. In addition, BoxFS protects individual file blocks by taking out locks for each block. Thus, two machines writing different blocks in the same file will contend for the metadata lock to update the file attributes, but not for the individual block. This reduces lock contention as well as cache coherence traffic due to false sharing.
Using the Boxwood abstractions enabled us to keep our file system code base small. The actual file system code is about 1700 lines of C# code, which is a more verbose language than C. The BoxFS code implementing a simple LRU buffer cache is an additional 800 lines, which is largely a reuse of the code in the B-tree cache module. The size of the code compares favorably with Mark Shand's classic user-level NFS daemon, which is about 2500 lines of C for read-only access to a UNIX file hierarchy [30]. In addition, we wrote code to support NFS RPC (both UDP and TCP) and XDR in C#, which accounted for an additional 2000 lines, and about 1000 lines of C to interface BoxFS to the native Windows networking libraries.
| |||||||||||||||||||||||||||||||||||||||||||||
We show the performance of BoxFS when the metadata log is lazily flushed to disk and also when it is not. In general, the performance of BoxFS is comparable to the native NFS server on top of a local NTFS file system. We have a slight edge on some meta-data intensive operations, which we attribute to our usage of B-trees. Depending on whether we synchronously update the log or not, the fifth test shows a marked difference (12.4 versus 3.7 seconds) even though file data is being updated asynchronously in both cases. This is because file write requires a metadata update, which involves a log write.
|
| ||||||||||||||||||||||||
To show the benefit of lazily updating the metadata log where possible, we report our results from running PostMark, a metadata intensive benchmark. This benchmark models the expected file system work load imposed by electronic mail, web based commerce, and netnews [18]. It creates an initial set of files of varying sizes. This measures the performance of the file system in creating small files. Next it measures the performance of a pre-determined number of ``transactions'', where a transaction is either the creation or deletion of a file followed by either a read or append to a file. We ran the benchmark with the settings shown in Table 4. Our results are shown in Table 5. Since the benchmark emphasizes metadata intensive operations, BoxFS performs well.
|
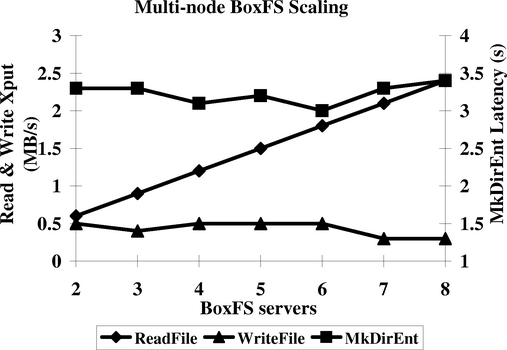
Since benchmarks for multi-node file systems like BoxFS are difficult to obtain, we show scaling characteristics of BoxFS on three simple experiments in Figure 8. In all three experiments, we run the Boxwood abstractions on all 8 machines in our cluster. We export a single shared NFS volume from one or more of these machines. By the nature of NFS mounting, the single volume appears as separate file systems to the client.
In the first experiment (ReadFile in Figure 8), a single 1 MB NFS file is read from multiple mount points, with a cold client cache and a cold server cache. As we would expect, the aggregate throughput increases linearly as the number of servers is increased since there is no contention.
In the second experiment (MkDirEnt in the figure), we create 100 files with unique names in the root directory of each NFS volume. This results in NFS Create RPC requests to each BoxFS machine, which in turn modifies the B-tree corresponding to the single shared directory. There are two potential sources of conflict traffic. First, we are inserting into a shared B-tree, which will result in locking and data transfer in the B-tree module; second, BoxFS has to acquire a lock to ensure that the metadata update and the B-tree insertion is consistently done. Since our experiments in Figure 7 show that we can perform in excess of 300 insertions a second into the B-tree, we believe the performance bottleneck is the traffic to keep the metadata up to date. For comparison, the performance when there is no sharing (single machine case) is 0.6 ms.
In the final experiment (WriteFile in the figure), we write data to a shared file, but at non-overlapping offsets. Each write results in an NFS Write RPC to a different BoxFS machine. Since BoxFS implements fine-grained locking at the file block level, the coherence traffic and lock contention, which determines scaling, is limited to what is required to keep the file metadata up to date. For comparison, the performance in the single machine (no contention) case is 4 MB/sec.
Some early seeds of our work are present in the ``scalable distributed data structures'' (SDDSs) of Litwin et al. [24,25,26]. Litwin's SDDSs offer algorithms for interacting in a scalable fashion with a particular family of data structures. Our focus in Boxwood is significantly different, in that we are concerned with systems issues such as reliability and fault-tolerance in general abstractions--issues that were largely ignored in Litwin's work.
The ``scalable distributed data structure'' approach of Gribble et al. [13] is the previous work most similar to Boxwood. We view our work as complementary to theirs. The implementation of different data structures (hash tables versus B-trees) offers very different tradeoffs. Furthermore, our failure models are different, which also lead to very different system design techniques. Gribble et al. designed their system assuming the availability of uninterruptible power supplies, so transient failures that take down the entire cluster are extremely rare. They rely on data always being available in more than one place (in RAM or on disk on multiple machines) to design their recovery protocols.
Production systems like BerkeleyDB [15] and DataBlade are related to our approach and were sources of early inspiration for our work. These systems offer much more functionality than we do at the moment, but neither is distributed.
Petal [21] is another related approach to scalable storage. Petal provides similar durability and consistency guarantees to Boxwood, but it presents applications with a single sparse address space of blocks. Applications must coherently manage this space themselves, and implement their own logging and recovery mechanisms for any data structures they employ. Many of the basic services that Petal uses are similar in spirit to ours. Similarly, the overall structure of the B-link tree service is reminiscent of Frangipani [32].
Distributed databases are another approach to scalably storing information (e.g., [23]). However, we view our system as lower-level infrastructure that we hope database designers will use (and we plan to use it in this way ourselves). We have deliberately avoided mechanisms that we felt are unnecessary in the lower levels of storage architecture: query parsing, deadlock detection, and full-fledged transactions.
Distributed file systems also enable storage to scale in some respects (e.g., [2,10] to name but two). But, once again, our view is that these will be layered over the facilities of Boxwood.
Boxwood's layering of a file system on top of B-trees is related to Olson's Inversion File System, which is layered on top of a full-fledged Postgres database [27]. The Inversion File System is capable of answering queries about the file system that our implementation cannot. Since our file system is layered on a simpler abstraction, all things being equal, we expect a performance increase at the expense of reduced querying capability.
Recent work on Semantically Smart Disks [31] is also related to Boxwood. Like Boxwood, semantically smart disks strive for better file system performance by exploiting usage patterns and other semantics within the lower layers of the storage system. Unlike Boxwood, semantically smart disks present a conventional disk interface (e.g., SCSI) to higher levels, but try to encapsulate (or infer) semantic knowledge about the file system to enhance performance.
Many projects, including FARSITE [1], OceanStore [19], and the rapidly-growing literature on distributed hash tables (e.g., [34]), have attempted to provide scalable storage over a wide area network. These all address a set of trade-offs quite different to those of Boxwood. The wide-area solutions must deal with untrusted participants, frequent reconfiguration, high network latency, and variable bandwidth. Thus, these solutions do not take advantage of the more benign conditions for which Boxwood was designed.
There are also many projects using local area clusters to provide scalable services or persistent distributed objects. Typically, these rely on a file system or database to manage their storage (e.g., [7,8]) or build an application-specific storage service (e.g., [29]) and do not offer easily-utilized, atomically-updating data structures.
Network attached secure disks (NASD) [11] are also related to Boxwood in that they provide a storage abstraction at a higher level than raw blocks.
Our choice of the B-link tree was motivated by the observation that it is well suited for distributed implementation. A similar observation was made independently by Johnson and Colbrook [16], who proposed B-link tree variants called DE- and DB-trees for shared memory multiprocessors. Their scheme explicitly replicates internal nodes on specific processors and stores contiguous sets of keys on a processor. Our implementation is more dynamic and our algorithm is simpler at the cost of having a distributed lock service.
Our use of the chunk manager as a generalized storage allocator obviating the need for address space management elsewhere in the system seems to be widely applicable. In our case, it enabled us to distribute a complicated data structure with modest programming effort.
Our strategy of isolating the use of the Paxos module to a relatively small part of the system has worked well in practice. It allows us to continue to scale the rest of the system dynamically without much hindrance.
Does the design of BoxFS support our claim that building scalable applications using the Boxwood infrastructure is easy? This is a subjective question, but our feeling on this is positive. BoxFS is a distributed file system with good resilience and scalability. Yet it does not require complicated locking, logging, or recovery schemes, making it very easy to implement. We need further performance analysis to make more objective comparisons.
This document was generated using the LaTeX2HTML translator Version 2002-2-1 (1.71)
Copyright © 1993, 1994, 1995, 1996,
Nikos Drakos,
Computer Based Learning Unit, University of Leeds.
Copyright © 1997, 1998, 1999,
Ross Moore,
Mathematics Department, Macquarie University, Sydney.
The command line arguments were:
latex2html -split 0 -show_section_numbers -local_icons paper.tex
The translation was initiated by jmacc on 2004-10-04
|
This paper was originally published in the
Proceedings of the 6th Symposium on Operating Systems Design and Implementation,
December 6–8, Atlanta, GA Last changed: 18 Nov. 2004 aw |
|