|
NSDI '05 Paper
[NSDI '05 Technical Program]
Designing Extensible IP Router Software1
Mark Handley**, Eddie Kohler***,
Atanu Ghosh*, Orion Hodson*,2,
and Pavlin Radoslavov*
{mjh, kohler, atanu, hodson, pavlin}@xorp.org
| *ICSI |
**University College, London |
***UCLA |
Abstract:
Many problems with today's Internet routing infrastructure--slow
BGP convergence times exacerbated by timer-based route scanners, the
difficulty of evaluating new protocols--are not architectural or protocol
problems, but software problems. Router software designers have
tackled scaling challenges above all, treating extensibility and latency
concerns as secondary. At this point in the Internet's
evolution, however, further scaling and security issues require tackling
latency and extensibility head-on.
We present the design and implementation of XORP, an IP routing software
stack with strong emphases on latency, scaling, and extensibility. XORP is
event-driven, and aims to respond to routing changes with minimal
delay--an increasingly crucial requirement, given rising expectations for
Internet reliability and convergence time. The XORP design
consists of a composable framework of routing processes, each in turn
composed of modular processing stages through which routes flow.
Extensibility and latency concerns have influenced XORP throughout, from
IPC mechanisms to process arrangements to intra-process software structure,
and leading to novel designs.
In this paper we discuss XORP's design and implementation, and
evaluate the resulting software against our performance and extensibility
goals.
The Internet has been fabulously successful; previously unimagined
applications frequently arise, and changing usage patterns have
been accommodated with relative ease. But underneath this
veneer, the low-level protocols that support the Internet have largely
ossified, and stresses are beginning to show. Examples include security
and convergence problems with BGP routing [18],
deployment problems with
multicast [10], QoS, and IPv6,
and the lack of effective defense mechanisms
against denial-of-service attacks.
The blame for this ossification has been placed at various technical and non-technical
points in the Internet architecture, from limits of layered protocol
design [4] to the natural conservatism of commercial
interests [9]; suggested solutions have included
widespread overlay networks [24,23] and
active
networking [6,30].
But less attention has been paid to a simple, yet fundamental, underlying
cause: the lack of extensible, robust, high-performance router
software.
The router software market is
closed: each vendor's routers will run only that vendor's software.
This makes it almost
impossible for researchers to experiment in real networks, or to
develop proof-of-concept code that might convince network operators
that there are alternatives to current practice.
A lack of open router APIs additionally excludes startup companies as a
channel for change.
The solution seems simple in principle: router software should have open
APIs.
(This somewhat resembles active networks, but we believe that a more
conservative approach is more likely to see real-world deployment.)
Unfortunately, extensibility can conflict with the other fundamental goals
of performance and robustness, and with the sheer complexity presented by
routing protocols like BGP.
Relatively few software systems have robustness and security goals as
stringent as those of routers, where localized instability or
misconfiguration can ripple throughout the Internet [3].
Routers must also juggle hundreds of thousands of routes, which can be
installed and withdrawn en masse as links go up and down. This limits the
time and space available for extensions to run.
Unsurprisingly, then, existing router software was not written with
third-party extension in mind, so it doesn't generally include the right
hooks, extension mechanisms and security boundaries.
We therefore saw the need for a new suite of router software:
an integrated open-source software router platform running on
commodity hardware, and viable both in research and production.
The software architecture would have extensibility as a primary goal,
permitting experimental protocol deployment with minimal risk to existing
services.
Internet researchers needing access to router software would share a common
platform for experimentation, and get an obvious path to deployment for
free.
The loop between research and realistic real-world experimentation would
eventually close, allowing innovation to take place much more freely.
We have made significant progress towards building this system, which we
call XORP, the eXtensible Open Router Platform [13].
This paper focuses on the XORP control plane: routing protocols,
the Routing Information Base (RIB), network management software,
and related
user-level programs that make up the vast majority of software on a router
today. This contrasts with the forwarding plane, which
processes every packet passing through the router.
Prior work on component-based forwarding planes has simultaneously achieved
extensibility and good performance [26,16],
but these designs, which are based on the flow of packets, don't apply
directly to complex protocol processing and route wrangling.
XORP's contributions, then, consist of the strategies we used to break the
control plane, and individual routing protocols, into components that
facilitate both extension and good performance.
For example, we treat both BGP and the RIB as
networks of routing stages, through which routes flow.
Particular stages within those networks can combine routes from different
sources using various policies, or notify other processes when routes
change.
Router functionality is separated into many Unix processes for robustness.
A flexible IPC mechanism lets modules communicate with each other
independent of whether those modules are part of the same process, or even
on the same machine; this allows untrusted processes to be
run entirely sandboxed, or even on different machines from the
forwarding engine.
XORP processes are event-driven, avoiding the widely-varying delays
characteristic of timer-based designs (such as those deployed in most Cisco
routers).
Although XORP is still young, these design choices are stable enough to
have proven their worth, and to demonstrate that extensible, scalable, and
robust router software is an achievable goal.
The rest of this paper is organized as follows. After discussing related
work (Section 2), we describe a generic router control plane
(Section 3) and an overview of XORP (Section 4).
Sections 5 and 6 describe particularly relevant parts of
the XORP design: the routing stages used to compose the RIB and routing
protocols like BGP and our novel inter-process communication mechanism.
The remaining sections discuss our security framework; present a
preliminary evaluation, which shows that XORP's extensible design does not
impact its performance on macro-benchmarks; and conclude.
2 Related Work
Previous work discussed XORP's requirements and high-level design
strategy [13]; this paper presents specific solutions we
developed to achieve those requirements.
We were inspired by prior work on extensible forwarding planes, and support
Click [16], one such forwarding plane, already.
Individual open-source routing
protocols have long been available, including
routed [29] for RIP, OSPFd [20] for OSPF, and
pimd [14] for PIM-SM multicast routing.
However, interactions between protocols can be problematic unless carefully
managed.
GateD [21] is perhaps the best known integrated routing
suite, although it began as an implementation of a single routing
protocol. GateD is a single process within which all routing protocols
run.
Such monolithic designs are fundamentally at odds with the concept of
differentiated trust, whereby more experimental code can be run
alongside existing services without destabilizing the whole router.
MRTD [28] and BIRD [2], two other
open-source IP router stacks, also use a
single-process architecture. In the commercial world, Cisco
IOS [7] is also a monolithic architecture; experience has
shown that this significantly inhibits network operators from
experimenting with Cisco's new protocol implementations.
Systems that use a multi-process architecture, permitting greater
robustness, include Juniper's JunOS [15]
and Cisco's most recent operating
system IOS XR [8]. Unfortunately, these vendors
do not make their APIs accessible to third-party developers, so
we have no idea if their internal structure is well suited to
extensibility.
The open-source Zebra [31] and Quagga [25] stacks use
multiple processes as well,
but their shared inter-process API is
limited in capability and may deter innovation.
Another important distinguishing factor between implementations is
whether a router is event-driven or uses
a periodic route scanner to resolve dependencies between routes.
The scanner-based approach is simpler, but has a rather
high latency before a route change actually takes effect. Cisco IOS
and Zebra both use route scanners, with (as we demonstrate) a significant
latency cost; MRTD and BIRD are event-driven, but this is easier given a
single monolithic process.
In XORP, the decision that everything is event-driven is fundamental and
has been reflected in the design and implementation of all protocols, and
of the IPC mechanism.
3 Control Plane Functional Overview
The vast majority of the software on a router is control-plane software:
routing protocols, the Routing Information Base (RIB), firewall management,
command-line interface, and network management--and, on modern
routers, much else, including address management and ``middlebox''
functionality.
Figure 1 shows a basic functional breakdown of the most
common software on a router.
The diagram's relationships correspond to those in XORP and, with small
changes, those in any router.
The rest of this section explores those relationships further.
Figure 1:
Typical router control plane functions
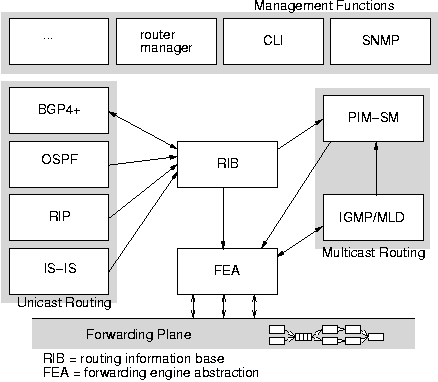 |
The unicast routing protocols (BGP, RIP, OSPF, and IS-IS) are clearly
functionally separate, and most routers only run a subset of these.
However, as we will see later, the coupling between routing protocols is
fairly complex. The arrows on the diagram illustrate the major flows of
routing information, but other flows also exist.
The Routing Information Base (RIB) serves as the
plumbing between
routing protocols. Protocols such as RIP and OSPF receive
routing information from remote routers, process it to discover
feasible routes, and send these routes to the RIB. As multiple
protocols can supply different routes to the same destination subnet,
the RIB must arbitrate between alternatives.
BGP has a more complex relationship with the RIB. Incoming IBGP
routes normally indicate a nexthop
router for a destination, rather than an immediate neighbor. If there are
multiple IBGP routes to the same subnet, BGP will
typically need to know the routing metrics for each choice
so as to decide which route has the nearest exit (so-called ``hot potato''
routing). Thus, BGP must examine
the routing information supplied to the RIB by other routing protocols
to make its own routing decisions.
A key instrument of
routing policy is the process of route redistribution, where routes
from one routing protocol that match certain policy filters are
redistributed into another routing protocol for advertisement to other
routers. The RIB, as the one part of the system that sees everyone's
routes, is central to this process.
The RIB is thus crucial to the correct functioning of
a router, and should be extended only with care.
Routing protocols may come and go, but the RIB should ideally be general
enough to cope with them all; or failing that, it should support small,
targeted extensions that are easily checked for correctness.
The Forwarding Engine Abstraction (FEA) provides a stable API for
communicating with a forwarding engine or engines. In principle, its
role is syntactic, and many single-platform routers leave it out,
communicating with the forwarding plane directly.
PIM-SM (Protocol Independent Multicast--Sparse
Mode [12])
and IGMP provide multicast routing functionality, with PIM performing the
actual routing and IGMP informing PIM of the existence of local
receivers. PIM contributes routes not to the RIB, but
directly via the FEA to the forwarding
engine.
Thus, the FEA's interface is important for more than just the RIB.
However, PIM does use the RIB's routing information to
decide on the reverse path back to a multicast source.
The ``Router Manager'' holds the router configuration and starts,
configures, and stops protocols and other router functionality.
It hides the router's internal structure from the user, providing operators
with unified management interfaces for examination and reconfiguration.
Our goal is a router control plane that provides all this functionality,
including all the most widely used routing protocols, in a way that
encourages extensibility.
At this point, we do not
automatically protect operators from malicious extensions or experimental
code.
Instead, our software architecture aims to minimize
extension footprint, making it feasible for operators to check the code
themselves.
This requires a fundamental design shift from the monolithic,
closely-coupled designs currently prevalent.
In Section 7 we will discuss in more detail our current
and future plans for XORP's security framework.
4 XORP Overview
The XORP control plane implements this functionality diagram as a set of
communicating processes.
Each routing protocol and management function is implemented by a separate
process, as are the RIB and the FEA.
Processes communicate with one another using an extensible IPC mechanism
called XORP Resource Locators, or XRLs. This blurs the distinction between
intra- and inter-process calls, and will even support transparent
communication with non-XORP processes.
The one important process not represented on the diagram is the
Finder, which acts as a broker for IPC requests; see
Section 6.2.
(XORP 1.0 supports BGP and RIP; support for OSPF and IS-IS is under
development.)
This multi-process design limits the coupling between components;
misbehaving code, such as an experimental routing protocol, cannot directly
corrupt the memory of another process.
Performance is a potential downside, due to frequent IPCs; to address it,
we implemented various ways to safely cache IPC results such as routes
(Section 5.2.1).
The multi-process approach also serves to decouple development for
different functions, and encourages the development of stable APIs.
Protocols such BGP and RIP are not special in the XORP design--they use
APIs equally available to all. Thus, we have confidence that those APIs
would prove sufficient, or nearly so, for most experimental routing
protocols developed in the future.We have some confirmation of
this: a group implementing an ad-hoc routing protocol found that XORP's RIB
supported their application with just one trivial interface
change [17].
We chose to implement XORP primarily in C++, because of its object
orientation and good performance.
Realistic alternatives would have been C and Java.
When we started implementing XORP, the choice was not completely clear cut,
but we've become increasingly satisfied; for example,
extensive use of C++
templates allows common source code to be used for both IPv4 and
IPv6, with the compiler generating
efficient implementations for both.
Each XORP process adopts a single-threaded event-driven
programming model.
An application such as a routing protocol, where events affecting common
data come from many sources simultaneously, would likely have high locking
overhead; but, more importantly, our experience is that it is very hard for
new programmers to understand a multi-threaded design to the point of being
able to extend it safely.
Of course, threaded programs could integrate with XORP via IPC.
The core of XORP's event-driven programming model is a traditional
select-based event loop based on the SFS
toolkit [19]. Events are generated by timers and file
descriptors; callbacks are dispatched whenever an event occurs.
Callbacks are type-safe C++ functors, and allow for the currying of
additional arguments at creation time.
When an event occurs, we attempt to process that event to completion,
including figuring out all inter-process dependencies.
For example, a RIP route may be used to resolve the nexthop in a BGP route;
so a RIP route change must immediately notify BGP, which must then figure
out all the BGP routes that might change as a result. Calculating these
dependencies quickly and efficiently is difficult, introducing strong
pressure toward a periodic route scanner design.
Unfortunately, periodic scanning introduces variable latency and can lead
to increased load bursts, which can affect forwarding performance.
Since low-delay route convergence is becoming critical to ISPs, we believe
that future routing implementations must be event-driven.
Even in an event-driven router, some tasks
cannot be processed to completion in one step. For example,
a router with a full BGP table may receive well
over 100,000 routes from a single peer. If that peering goes down,
all these routes need to be withdrawn from all other peers. This
can't happen instantaneously, but a flapping peer should not prevent or
unduly delay the processing of BGP updates from other peers. Therefore,
XORP supports
background tasks, implemented using our timer handler, which run only
when no events are being processed. These background tasks are essentially
cooperative threads: they divide processing up into small slices, and
voluntarily return execution to the process's main event loop from time to
time until they complete.
We intend for XORP to run on almost any modern operating system.
We initially provide support, including FEA support, for FreeBSD and Linux,
and for FreeBSD and Linux running Click as a forwarding path. Windows
support is under development.
5 Routing Table Stages
From the general process structure of the XORP control plane, we now turn
to modularity and extensibility within single processes, and
particularly to the ways we divide routing table processing into
stages in BGP and the RIB. This modularization makes route dataflow
transparent, simplifies the implementation of individual stages, clarifies
overall organization and protocol interdependencies, and facilitates
extension.
Figure 2:
Abstract routing protocol
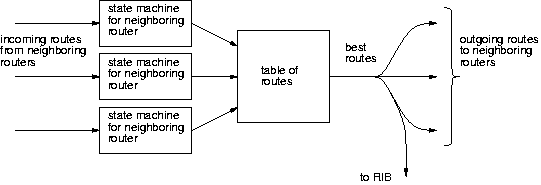 |
At a very high level, the abstract model
in Figure 2 can represent routing protocols such as RIP or BGP.
(Link-state protocols differ slightly since they
distribute all routing information to their neighbors, rather
than just the best routes.) Note that
packet formats and state machines are largely separate from route
processing, and that all the real magic--route selection, policy filtering,
and so forth--happens within the table of routes.
Thus, from a software structuring point of view, the interesting part
is the table of routes.
Unfortunately, BGP and other modern routing protocols are big and
complicated, with many extensions and features, and it is very hard to
understand all the interactions, timing relationships, locking, and
interdependencies that they impose on the route table.
For instance, as we mentioned, BGP
relies on information from intra-domain routing protocols (IGPs) to decide
whether the nexthop in a BGP route is actually reachable
and what the metric is to that nexthop router.
Despite these dependencies, BGP must
scale well to large numbers of routes and large numbers of peers.
Thus, typical router implementations put all routes
in the same memory space as BGP, so
that BGP can directly see all the information relevant to it. BGP then
periodically walks this jumbo routing table to figure out which routes
win, based on IGP routing information. This structure is illustrated
in Figure 3. While we don't know how Cisco implements
BGP, we can infer from clues from Cisco's command line interface and
manuals that it probably works something like this.
Unfortunately, this structure makes it very hard to separate functionality
in such a way that future programmers can see how the pieces interact
or where it is safe to make changes.
Without good structure
we believe that it will be impossible for future programmers to extend
our software without compromising its stability.
Figure 3:
Closely-coupled routing architecture
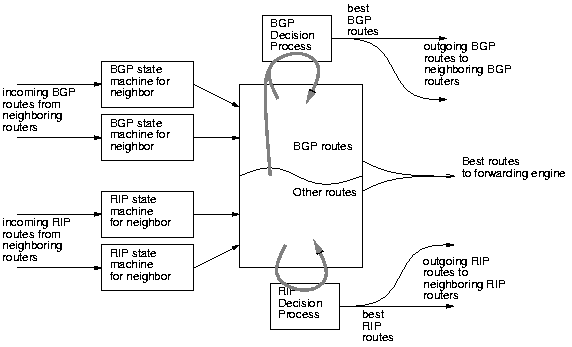 |
Our challenge is to implement BGP and the RIB in a more decoupled
manner that clarifies the interactions between modules.
The mechanism we chose is the clear one of data flow.
Rather than a single, shared, passive table that stores information and
annotations, we implement routing tables as dynamic processes through which
routes flow.
There is no single routing table object, but rather a network of pluggable
routing stages, each implementing the same interface.
Together, the network stages combine to implement a routing table
abstraction.
Although unusual--to our knowledge, XORP is the only router using this
design--stages turn out to be a natural model for routing tables. They
clarify protocol interactions, simplify the movement of large numbers of
routes, allow extension, ease unit testing, and localize complex data
structure manipulations to a few objects (namely trees and iterators; see
Section 5.3).
The cost is a small performance penalty and slightly greater memory usage,
due to some duplication between stages. To quantify
this, a XORP router holding a full backbone routing table of about
150,000 routes requires about 120 MB for BGP and 60 MB for the RIB,
which is simply not a problem on any recent hardware.
The rest of this section develops this stage design much as we developed it
in practice.
To a first approximation, BGP can be modeled as the pipeline architecture,
shown in Figure 4. Routes come in from a
specific BGP peer and progress through an incoming filter bank into the
decision process. The best routes then proceed down additional pipelines,
one for each peering, through an outgoing filter bank and then on to the
relevant peer router.
Each stage in the pipeline
receives routes from upstream and passes them downstream, sometimes
modifying or filtering them along the way. Thus,
stages have essentially the same API, and are
indifferent to their surroundings:
new stages can be added to the pipeline without disturbing their neighbors,
and their interactions with the rest of BGP are constrained by the stage
API.
Figure 4:
Staged BGP architecture
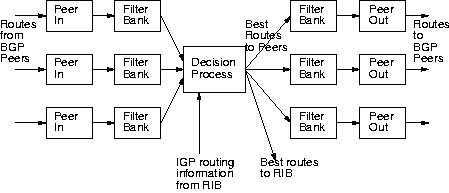 |
The next issue to resolve is where the routes are actually stored. When a
new route to a destination arrives, BGP must compare it against all
alternative routes to that destination (not just the previous winner),
which dictates that all alternative routes need to be stored. The natural
place might seem to be the Decision Process stage; but this would
complicate the implementation of filter banks: Filters can be
changed by the user, after which we need to re-run the filters
and re-evaluate which route won. Thus, we only store the original versions
of routes, in the Peer In stages. This in turn means that the Decision
Process must be able to look up alternative routes via calls
upstream through the pipeline.
The basic interface for a stage is therefore:
- add_route: A preceding stage is sending a new route to
this stage. Typically the route will be dropped, modified, or
passed downstream to the next stage unchanged.
- delete_route: A preceding stage is sending a delete
message for an old route to this stage. The deletion should be
dropped, modified, or passed downstream to the next stage
unchanged.
- lookup_route: A later stage is asking this stage to
look up a route for a destination subnet. If the stage cannot answer
the request itself, it should pass the request upstream to the
preceding stage.
These messages can pass up and down the pipeline, with the constraint
that messages must be consistent. There are two consistency rules:
(1) Any delete_route message
must correspond to a previous add_route message; and (2)
the
result of a lookup_route should be consistent with
previous add_route and delete_route messages sent
downstream.
These rules lessen the stage implementation burden. A
stage can assume that upstream stages are consistent,
and need only preserve consistency for downstream stages.
For extra protection, a BGP pipeline could include stages
that enforced consistency around possibly-erroneous experimental
extensions, but so far we have not needed to do this. Instead, we have
developed an extra consistency checking stage for debugging purposes.
This cache stage, just after the outgoing filter bank in
the output pipeline to each peer, has helped us discover many
subtle bugs that would otherwise have gone undetected.
While not intended for normal production use, this stage
could aid with debugging if a consistency error is
suspected.
The Decision Process in this pipeline is rather complex: in addition
to deciding which route wins, it must get nexthop
resolvability and metric information from the RIB, and fan out
routing information to the output peer pipeline branches and to the
RIB. This coupling of functionality is undesirable both because it
complicates the stage, and because there are no obvious extension points
within such a macro-stage. XORP thus further decomposes the Decision
Process into Nexthop Resolvers, a simple Decision Process, and a
Fanout Queue, as shown in Figure 5.
Figure 5:
Revised staged BGP architecture
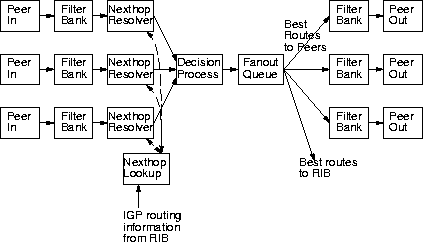 |
The Fanout Queue, which duplicates routes for each peer and for the RIB, is
in practice complicated by the need to send routes to slow peers. Routes
can be received from one peer faster than we can transit them via BGP to
other peers. If we queued updates in the n Peer Out stages, we could
potentially require a large amount of memory for all n queues. Since the
outgoing filter banks modify routes in different ways for different peers,
the best place to queue changes is in the fanout stage, after the routes
have been chosen but before they have been specialized. The Fanout Queue
module then maintains a single route change queue, with n
readers (one for each peer) referencing it.
The Nexthop Resolver stages talk asynchronously to the RIB to discover
metrics to the nexthops in BGP's routes. As replies arrive, it annotates
routes in add_route and lookup_route messages with the
relevant IGP metrics. Routes are held in a queue until the relevant
nexthop metrics are received; this avoids the need for the Decision
Process to wait
on asynchronous operations.
The BGP process's stages are dynamic, not static; new stages can be
added and removed as the router runs.
We made use of this capability in a surprising way when we needed to deal
with route deletions due to peer failure.
When a peering goes down, all the routes received by
this peer must be deleted. However, the deletion of more than 100,000 routes
takes too long to be done in a single event handler.
This needs to be divided up into slices of work, and handled as a
background task. But this leads to a further problem: a peering can come
up and go down in rapid succession, before the previous background task has
completed.
To solve this problem, when a peering goes down we create a new
dynamic deletion stage, and plumb it in directly after the
Peer In stage (Figure 6).
Figure 6:
Dynamic deletion stages in BGP
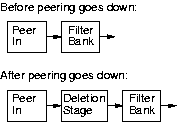 |
The route table from the Peer In is handed to the deletion
stage, and a new, empty route table is created in the Peer In. The
deletion stage ensures consistency while gradually deleting all the
old routes in the background; simultaneously, the Peer In--and thus
BGP as a whole--is immediately ready for the peering to come back up.
The Peer In doesn't know or care if background deletion is taking place
downstream. Of course, the deletion stage must still ensure
consistency, so if it receives an add_route message from the
Peer In that refers to a prefix that it holds but has not yet got
around to deleting, then first it sends a delete_route
downstream for the old route, and then it sends the add_route
for the new route. This has the nice side effect of ensuring that if the
peering flaps many times in rapid succession, each route is held in at
most one deletion stage. Similarly, routes not yet deleted will still
be returned by lookup_route until after the deletion stage has
sent a delete_route message downstream. In this way none of
the downstream stages even know that a background deletion process is
occurring--all they see are consistent messages. Even the deletion
stage has no knowledge of other deletion stages; if the peering
bounces multiple times, multiple dynamic deletion stages will be
added, one for each time the peering goes down. They will unplumb and
delete themselves when their tasks are complete.
We use the ability to add dynamic stages for many background tasks, such as
when routing policy filters are changed by the operator and many routes
need to be re-filtered and reevaluated. The staged routing table design
supported late addition of this kind of complex functionality
with minimal impact on other code.
Other XORP routing processes also use variants of this staged design.
For example, Figure 7 shows the basic structure of the XORP RIB
process. Routes come into the RIB from
multiple routing protocols, which play a similar role to BGP's peers.
When multiple routes are available to the same
destination from different protocols, the RIB must decide which one to use
for forwarding. As with BGP, routes are stored only in the origin stages,
and similar add_route, delete_route and lookup_route messages traverse between the stages.
Figure 7:
Staged RIB architecture
 |
Unlike with BGP, the decision process in the RIB is distributed as pairwise
decisions between Merge Stages, which combine route tables with conflicts
based on a preference order, and an ExtInt Stage, which composes a set of
external routes with a set of internal routes.
In BGP, the decision stage needs to see all possible alternatives to make
its choice; the RIB, in contrast, makes its decision purely on the basis of
a single administrative distance metric. This single metric allows
more distributed decision-making, which we prefer, since it better supports
future extensions.
Dynamic stages are inserted as different watchers register themselves
with the RIB. These include Redist
Stages, which contain programmable
policy filters to redistribute a route subset to a routing
protocol, and Register Stages, which redistribute routes depending on
prefix matches. This latter process, however, is slightly more complex
than it might first appear.
5.2.1 Registering Interest in RIB Routes
A number of core XORP processes need to be able to track changes in
routing in the RIB as they occur.
For example, BGP needs to monitor routing changes
that affect IP addresses listed as the nexthop router in BGP routes, and
PIM-SM needs to monitor routing changes that affect routes to
multicast source addresses and PIM Rendezvous-Point routers.
We expect the same to be true of future extensions.
This volume of registrations puts pressure on the Register Stage interface used to
register and call callbacks on the RIB.
In monolithic or shared-memory designs centered around a single routing
table structure, a router could efficiently monitor the structure for
changes, but such a design cannot be used by XORP. We need to share the
minimum amount of information between the RIB and its clients, while
simultaneously minimizing the number of requests handled by the RIB.
What BGP and PIM want to know
about is the routing for specific IP addresses. But this list of
addresses may be moderately large, and many addresses may be routed as
part of the same subnet. Thus when BGP asks the RIB about a specific
address, the RIB informs BGP about the address range for which the
same answer applies.
Figure 8:
RIB interest registration
 |
Figure 8 illustrates this
process.
The RIB holds routes for 128.16.0.0/16, 128.16.0.0/18,
128.16.128.0/17 and
128.16.192.0/18.
If BGP asks the RIB about address 128.16.32.1, the RIB tells BGP that the
matching route is 128.16.0.0/18, together with the relevant metric
and nexthop router information. This address also matched 128.16.0.0/16,
but only the more specific route is reported. If BGP later becomes
interested in address 128.16.32.7, it does not need to ask the RIB because
it already knows this address is also covered by 128.16.0.0/18.
However, if BGP asks the RIB about address 128.16.160.1, the
answer is more complicated. The most specific matching route is
128.16.128.0/17, and indeed the RIB tells BGP this. But
128.16.128.0/17 is overlayed by 128.16.192.0/18, so if BGP only knew
about 128.16.128.0/17 and later became interested in 128.16.192.1,
it would erroneously conclude that this is also covered by
128.16.128.0/17.
Instead, the RIB computes the largest
enclosing subnet that is not overlayed by a more specific route (in
this case 128.16.128.0/18) and tells BGP that its answer is valid for
this subset of addresses only.
Should the situation change at any later stage, the RIB will send a
``cache invalidated'' message for the relevant subnet, and BGP can
re-query the RIB to update the relevant part of its cache.
Since no largest enclosing subnet ever overlaps any other in the cached
data, RIB clients like BGP can use balanced trees for fast route
lookup, with attendant performance advantages.
5.3 Safe Route Iterators
Each background stage responsible for processing a large routing table,
such as a BGP deletion stage, must remember its location in the relevant
routing table so that it can make forward progress on each rescheduling.
The XORP library includes route table iterator data structures that
implement this functionality (as well as a Patricia Tree implementation for
the routing tables themselves).
Unfortunately, a route change may occur while a background task is paused,
resulting in the tree node pointed to by an iterator being deleted. This
would cause the iterator to hold invalid state. To avoid this problem, we
use some spare bits in each route tree node to hold a reference count of
the number of iterators currently pointing at this tree node. If the route
tree receives a request to delete a node, the node's data is invalidated,
but the node itself is not removed immediately unless the reference count
is zero. It is the responsibility of the last iterator leaving a
previously-deleted node to actually perform the deletion.
The internals of the implementation of route trees and iterators are
not visible to the programmer using them. All the programmer needs to
know is that the iterator will never become invalid while the
background task is paused, reducing the feature
interaction problem between background tasks and event handling tasks.
6 Inter-process Communication
Using multiple processes provides a
solid basis for resource management and fault isolation, but requires
the use of an inter-process communication (IPC) mechanism.
Our IPC requirements were:
- to allow communication both between XORP processes
and with routing applications not built using the XORP framework;
- to use multiple transports transparently, including
intra-process calls, host-local IPC, and networked communication, to
allow a range of tradeoffs between flexibility and performance;
- to support component namespaces for extensibility and
component location for flexibility, and to provide security through
per-method access control on components;
- to support asynchronous messaging, as this is a natural fit for
an event-driven system; and
- to be portable, unencumbered, and lightweight.
During development we discovered an additional requirement, scriptability, and added it as a feature. Being able to script IPC calls
is an invaluable asset during development and for regression testing.
Existing messaging frameworks, such as CORBA [22] and
DCOM [5], provided the concepts of components, component addressing
and location, and varying degrees of support for alternative transports,
but fell short elsewhere.
We therefore developed our own XORP IPC mechanism.
The Finder process locates components and their methods;
communication proceeds via a naturally scriptable base called XORP
Resource Locators, or XRLs.
An XRL is essentially a method supported by a component.
(Because of code reuse and modularity, most processes contain more than one
component, and some components may be common to more than one process; so
the unit of IPC addressing is the component instance rather than the
process.)
Each component implements an XRL interface, or group of related methods. When one component
wishes to communicate with another, it composes an XRL
and dispatches it.
Initially a component knows only the generic component name, such as
``bgp'',
with which it wishes to communicate. The Finder must
resolve such generic XRLs into a form that specifies
precisely how communication should occur. The resulting resolved XRL
specifies the transport protocol family to be used,
such as TCP, and any parameters needed for
communication, such as hostname and port.
The canonical form of an XRL is textual and human-readable, and
closely resembles Uniform Resource Locators (URLs [1]) from
the Web. Internally XRLs are
encoded more efficiently, but the textual form permits XRLs to be called
from any scripting language via a simple call_xrl program.
This is put to frequent use in all our scripts for automated
testing. In textual form, a generic XRL might look like:
finder://bgp/bgp/1.0/set_local_as?as:u32=1777
And after Finder resolution:
stcp://192.1.2.3:16878/bgp/1.0/set_local_as?as:u32=1777
XRL arguments (such as ``as'' above, which is an Autonomous System
number) are restricted to a set of core types used throughout XORP,
including network addresses, numbers, strings, booleans, binary arrays,
and lists of these primitives.
Perhaps because our application domain is highly specialized, we have
not yet needed support for more structured arguments.
As with many other IPC mechanisms, we have an interface definition
language (IDL) that supports interface specification, automatic stub code
generation, and basic error checking.
6.2 Components and the Finder
When a component is created within a process, it instantiates a
receiving point for the relevant XRL protocol families, and then
registers this with the Finder. The registration includes
a component class, such as ``bgp''; a unique component instance name;
and whether or not the caller expects to be the sole instance of a particular
component class.
Also registered are each interface's supported methods
and each method's supported protocol families. This allows for
specialization; for example, one protocol family may be particularly
optimal for a particular method.
When a component wants to dispatch an XRL, it consults the Finder for
the resolved form of the XRL. In reply, it receives the resolved
method name together with a list of the available protocol families
and arguments to bind the protocol family to the receiver. For a
networked protocol family, these would typically include the hostname,
receiving port, and potentially a key. Once resolved, the dispatcher
is able to instantiate a sender for the XRL and request its dispatch.
XRL resolution results are cached, and these caches are updated by the
Finder when entries become invalidated.
In addition to providing resolution services, the Finder also provides
a component lifetime notification service. Components can request to
be notified when another component class or instance starts or stops.
This mechanism is used to detect component failures and component
restarts.
Protocol families are the mechanisms by which XRLs are transported
from one component to another. Each protocol family is responsible
for providing argument marshaling and unmarshaling facilities as well as
the IPC mechanism itself.
Protocol family programming interfaces are small and simple to implement.
In the present system, there are three protocol families for communicating
between XORP components: TCP, UDP, and intra-process, which is for
calls between components in the same process.
There is also a special Finder protocol family permitting the Finder
to be addressable through XRLs, just as any other XORP component.
Finally, there exists a kill protocol family, which is capable of
sending just one message type--a UNIX signal--to components within
a host. We expect to write further specialized protocol families for
communicating with non-XORP components. These will effectively act as
proxies between XORP and unmodified XORP processes.
7 Security Framework
Security is a critical aspect of building a viable extensible
platform. Ideally, an experimental protocol
running on a XORP router could do no damage to that router, whether
through poor coding or malice. We have not yet reached this ideal; this
section describes how close we are.
Memory protection is of course the first step, and XORP's multi-process
architecture provides this.
The next step is to allow processes to be sandboxed, so they cannot
access important parts of the router filesystem. XORP centralizes all
configuration information in the Router Manager, so no XORP process
needs to access the filesystem to load or save its configuration.
Sandboxing has limited use if a process needs to have root access to perform
privileged network operations. To avoid this need for root access,
the FEA is used as a relay for all network access.
For example, rather than sending UDP packets directly, RIP sends and
receives packets using XRL calls to the FEA. This adds a small cost
to networked communication, but as routing protocols are rarely
high-bandwidth, this is not a problem in practice.
This leaves XRLs as the remaining vector for damage. If a process
could call any other XRL on any other process, this would be a serious
problem. By default we don't accept XRLs remotely. To prevent local
circumvention, at component registration time the Finder includes a
16-byte random key in the registered method name of all resolved XRLs.
This prevents a process bypassing the use of the Finder for the
initial XRL resolution phase, because the receiving process will
reject XRLs that don't match the registered method name.
We have several plans for extending XORP's security.
First, the Router Manager will pass a unique secret to each process it
starts. The process will then use this secret
when it resolves an XRL with the Finder. The Finder is
configured with a set of XRLs that each process is allowed to call,
and a set of targets that each process is allowed to communicate with.
Only these permitted XRLs will be resolved; the
random XRL key prevents bypassing the Finder. Thus, the
damage that can be done by an errant process is limited to what can be
done through its normal XRL calls.
We can envisage taking this approach even further, and restricting the
range of arguments that a process can use for a particular XRL method.
This would require an XRL intermediary, but the flexibility of our XRL
resolution mechanism makes installing such an XRL proxy rather simple.
Finally, we are investigating the possibility of running different
routing processes in different virtual machines under the
Xen [11] virtual machine monitor, which would provide even better
isolation and allow us to control even the CPU utilization of an
errant process.
8 Evaluation
As we have discussed, the XORP design is modular, robust and
extensible, but these properties will come at some cost in performance
compared to more tightly coupled designs. The obvious concern is that
XORP might not perform well enough for real-world use. On previous
generations of hardware, this might have been true, but we will show
below that it is no longer the case.
The measurements are performed on a relatively low-end PC (AMD Athlon
1100MHz) running FreeBSD 4.10. At this stage of development we have
put very little effort into optimizing the code for performance, but we
have paid close attention to the computation complexity of our
algorithms. Nevertheless, as we show below, even without optimization
the results clearly demonstrate good performance, and the advantage of
our event-driven design.
8.1 XRL Performance Evaluation
One concern is that the XRL IPC mechanism might become a bottleneck in
the system. To verify that it is not, the metric we are interested in
is the throughput we can achieve in terms of number of XRL calls per
second.
To measure the XRL rate, we send a transaction of 10000 XRLs using a
pipeline size of 100 XRLs. Initially, the sender sends 100 XRLs
back-to-back, and then for every XRL response received it sends a new
request. The receiver measures the time between the beginning and the
end of a transaction. We evaluate three communication transport
mechanisms: TCP, UDP and Intra-Process direct calling where the XRL
library invokes direct method calls between a sender and receiver
inside the same process.3
Figure 9:
XRL performance results
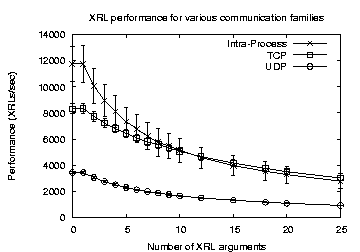 |
In Figure 9 we show the average XRL rate and
its standard deviation for TCP, UDP and Intra-Process transport
mechanisms when we vary the number of arguments to the XRL. These
results show that our IPC mechanism can easily sustain several
thousands of XRLs per second on a relatively low-end PC. Not
surprisingly, for a small number of XRL arguments, the Intra-Process
performance is best (almost 12000 XRLs/second), but for a larger
number of arguments the difference between Intra-Process and TCP
disappears. It is clear from these results that our argument
marshalling and unmarshalling is not terribly optimal, but despite
this the results are quite respectable. In practice, most commonly
used XRLs have few arguments. This result is very encouraging,
because it demonstrates that typically the bottleneck in the system
will be elsewhere.
The UDP performance is significantly worse because UDP
was our first prototype XRL implementation, and does not
pipeline requests. For normal usage, XORP currently uses TCP and does
pipeline requests. UDP is included here primarily to illustrate the
effect of request pipelining, even when operating locally.
Figure 10:
Route propagation latency (in ms), no initial routes
| |
|
Profile Point |
Avg |
SD |
Min |
Max |
|
Entering BGP |
- |
- |
- |
- |
|
Queued for transmission to the RIB |
0.226 |
0.026 |
0.214 |
0.525 |
|
Sent to RIB |
0.280 |
0.026 |
0.267 |
0.582 |
|
Arriving at the RIB |
1.036 |
0.132 |
0.964 |
2.285 |
|
Queued for transmission to the FEA |
1.139 |
0.132 |
1.066 |
2.389 |
|
Sent to the FEA |
2.234 |
1.903 |
1.965 |
31.663 |
|
Arriving at FEA |
2.876 |
1.918 |
2.580 |
32.443 |
|
Entering kernel |
3.374 |
1.980 |
3.038 |
33.576 |
|
|
|
|
|
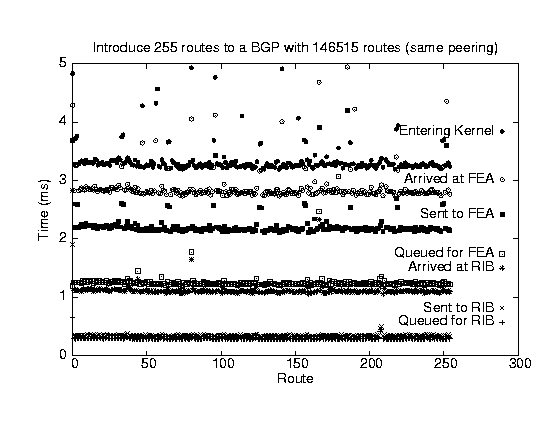
Figure 11:
Route propagation latency (in ms), 146515
initial routes and same peering
| |
|
Profile Point |
Avg |
SD |
Min |
Max |
|
Entering BGP |
- |
- |
- |
- |
|
Queued for transmission to the RIB |
0.289 |
0.015 |
0.275 |
0.447 |
|
Sent to RIB |
0.344 |
0.015 |
0.329 |
0.502 |
|
Arriving at the RIB |
1.112 |
0.088 |
1.052 |
2.331 |
|
Queued for transmission to the FEA |
1.247 |
0.088 |
1.187 |
2.465 |
|
Sent to the FEA |
2.362 |
1.571 |
2.108 |
25.910 |
|
Arriving at FEA |
3.019 |
1.590 |
2.734 |
26.689 |
|
Entering kernel |
3.632 |
3.394 |
3.191 |
56.422 |
|
|
|
|
|
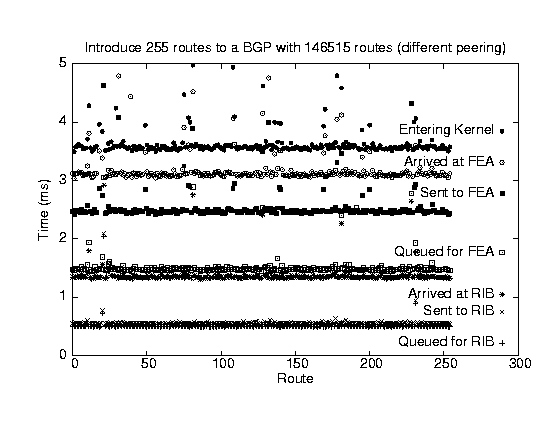
Figure 12:
Route propagation latency (in ms), 146515
initial routes and different peering
| |
|
Profile Point |
Avg |
SD |
Min |
Max |
|
Entering BGP |
- |
- |
- |
- |
|
Queued for transmission to the RIB |
0.508 |
0.100 |
0.483 |
2.039 |
|
Sent to RIB |
0.563 |
0.101 |
0.536 |
2.094 |
|
Arriving at the RIB |
1.377 |
0.182 |
1.306 |
2.920 |
|
Queued for transmission to the FEA |
1.517 |
0.193 |
1.438 |
3.053 |
|
Sent to the FEA |
3.149 |
5.943 |
2.419 |
92.391 |
|
Arriving at FEA |
3.822 |
5.964 |
3.037 |
93.179 |
|
Entering kernel |
4.417 |
6.278 |
3.494 |
93.662 |
|
|
|
|
|
8.2 Event-Driven Design Evaluation
To demonstrate the scaling properties of our event-driven design,
we present some BGP-related measurements. Routing processes not under
test such as PIM-SM and RIP were also running during the measurements,
so the measurements represent a fairly typical real-world configuration.
First, we perform some measurements with an empty routing table, and
then with a routing table containing a full Internet backbone routing
feed consisting of 146515 routes. The key metric we care about is how
long it takes for a route newly received by BGP to be installed into the
forwarding engine.
XORP contains a simple profiling mechanism which permits the insertion of
profiling points anywhere in the code. Each profiling point is
associated with a profiling variable, and these variables are configured
by an external program xorp_profiler using XRLs. Enabling a
profiling point causes a time stamped record to be stored, such as:
route_ribin 1097173928 664085 add 10.0.1.0/24
In this example we have recorded the time in seconds and microseconds
at which the route ``10.0.1.0/24'' has been added. When this
particular profiling variable is enabled, all routes that pass this
point in the pipeline are logged.
If a route received by BGP wins the decision process, it will be sent
to its peers and to the RIB (see Figure 1). When the route
reaches the RIB, if it wins against routes from other protocols, then
it is sent to the FEA. Finally, the FEA will unconditionally install the
route in the kernel or the forwarding engine.
The following profiling points were used to measure the flow of routes:
- Entering BGP
- Queued for transmission to the RIB
- Sent to the RIB
- Arriving at the RIB
- Queued for transmission to the FEA
- Sent to the FEA
- Arriving at the FEA
- Entering the kernel
One of the goals of this experiment is to demonstrate that
routes introduced into a system with an empty routing
table perform similarly to a system with a full BGP backbone feed of
146515 routes. In each test we introduce a new route every two
seconds, wait a second, and then remove the route. The BGP protocol
requires that the next hop is resolvable for a route to be used. BGP
discovers if a next hop is resolvable by registering interest with the
RIB. To avoid unfairly penalizing the empty routing
table tests, we keep one route installed during the test to prevent
additional interactions with the RIB that typically would not happen
with the full routing table.
The results are shown in
Figures 10-12. In the first
experiment (Figure 10) BGP contained no routes other
than the test route being added and deleted. In the second experiment
(Figure 11) BGP contained 146515 routes and the test
routes were introduced on the same peering from which the other routes
were received. In the third experiment (Figure 12)
BGP contained 146515 routes and the test routes were introduced on a
different peering from which the other routes were received, which
exercises different code-paths from the second experiment.
All the graphs have been cropped to show the most interesting
region. At the tables indicate, one or two routes took as much as 90ms
to reach the kernel. This appears to be due to scheduling
artifacts, as FreeBSD is not a realtime operating system.
The conclusion to be drawn from these graphs is that routing
events progress to the kernel very quickly (typically within 4ms
of receipt by BGP). Perhaps as importantly, the data structures
we use have good performance under heavy load, therefore the latency does not
significantly degrade when the router has a full routing table. The
latency is mostly dominated by the delays inherent in the context
switch that is necessitated by inter-process communication. We should
emphasize that the XRL interface is pipelined, so performance is still
good when many routes change in a short time interval.
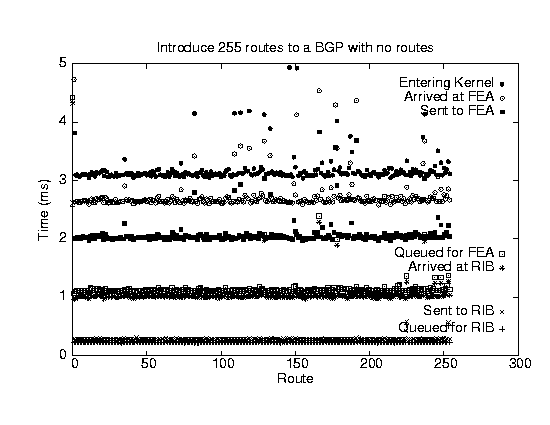
We have argued that an event driven route processing model leads to
faster convergence than the traditional route scanning approach. To
verify this assertion we performed a simple experiment, shown in
Figure 13. We introduced 255 routes from one BGP peer at
one second intervals and recorded the time that the route appeared at
another BGP peer. The experiment was performed on XORP, Cisco-4500 (IOS
Version 12.1), Quagga-0.96.5, and MRTD-2.2.2a routers. It should be
noted that the granularity of the measurement timer was one second.
This experiment clearly shows the consistent behavior achieved by
XORP, where the delay never exceeds one second.
MRTD's behavior is very similar, which is important because it
illustrates that the multi-process architecture used by XORP delivers
similar performance to a closely-coupled single-process
architecture. The Cisco and Quagga routers exhibit the obvious
symptoms of a 30-second route scanner, where all the routes received
in the previous 30 seconds are processed in one batch. Fast
convergence is simply not possible with such a scanner-based approach.
Teixeira et al demonstrate [27] that even route changes
within an AS can be adversely affected by the delay introduced by BGP
route scanners. In real ISP networks, the found delays of one to two
minutes were common between an IGP route to a domain border
router changing, and the inter-domain traffic flowing out of a domain
changing its exit router. During this delay, they show that transient
forwarding loops can exist, or traffic may be blackholed, both of
which may have significant impact on customers. Thus fast convergence
is clearly of high importance to providers, and can only become more
so with the increase in prominence of real-time traffic.
The hardest part of our design to properly evaluate is its
extensibility. Only time will tell if we really have the right
modularity, flexibility, and APIs. However, we can offer a number of examples
to date where extensibility has been tested.
Figure 13:
BGP route flow
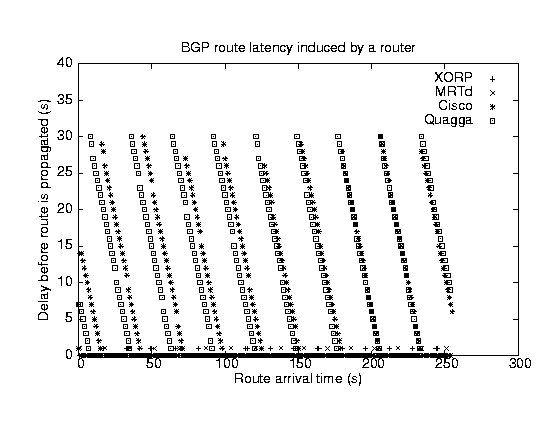 |
We implemented the core BGP and RIB functionality first, and only then
thought about how to configure policy, which is a large part of any
router functionality. Our policy framework consists of three new BGP
stages and two new RIB stages, each of which supports a common simple
stack language for operating on routes. The details are too lengthy
for this paper, but we believe this framework allows us to implement
almost the full range of policies available on commercial routers.
The only change required to pre-existing code
was the addition of a tag list to routes passed from BGP to the RIB
and vice versa. Thus, our staged architecture appears to have greatly
eased the addition of code that is notoriously complex in commercial
vendors' products.
What we got wrong was the syntax of the command line interface (CLI)
template files, described in [13], used to dynamically
extend the CLI configuration language. Our original syntax was not
flexible enough to allow user-friendly specification of the range of
policies that we need to support. This is currently being extended.
Route flap damping was also not a part of our original BGP design. We
are currently adding this functionality (ISPs demand it, even
though it's a flawed mechanism), and can do so efficiently and simply
by adding another stage to the BGP pipeline. The code does not impact
other stages, which need not be aware that damping is occurring.
XORP has now been used as the basis for routing research in a number
of labs. One university unrelated to our group used XORP to
implement an ad-hoc wireless routing protocol. In practice XORP
probably did not help this team greatly, as they didn't need any of
our existing routing protocols, but they did successfully implement
their protocol. Their implementation required a single change
to our internal APIs to allow a route to be specified by interface
rather than by nexthop router, as there is no IP subnetting in an
ad-hoc network.
9 Conclusions
We believe that innovation in the core protocols supporting the
Internet is being seriously inhibited by the nature of the router
software market. Furthermore, little long term research is being
done, in part because researchers perceive insurmountable obstacles to
experimentation and deployment of their ideas.
In an attempt to change the router software landscape, we have built
an extensible open router software platform. We have a stable core
base running, consisting of around 500,000 lines of C++ code. XORP is
event-driven, giving fast routing convergence, and
incorporates a multi-process design and novel inter-process
communication mechanisms that aid extensibility, and allow
experimental software to run alongside production software.
In this paper we have presented a range of innovative features,
including a novel staged design for core protocols, and a strong
internal security architecture geared around the sandboxing of
untrusted components. We also presented preliminary evaluation
results that confirm that our design scales well to large routing
tables while maintaining low routing latency.
In the next phase we need to involve the academic community, both as
early adopters, and to flesh out the long list of desirable
functionality that we do not yet support. If we are successful, XORP
will become a true
production-quality platform. The road ahead
will not be easy, but unless this or some other approach to enable
Internet innovation is successful, the long-run consequences of
ossification will be serious indeed.
We thank the other members of the XORP project, including Fred Bauer
(Linux), Andrea Bittau (routing policy), Javier Cardona (SNMP support),
Adam Greenhalgh (initial BGP implementation), Luigi Rizzo (fast
forwarding), Bruce M. Simpson (Windows), and Marko Zec (Click
integration and fast lookups).
We gratefully acknowledge those who financially supported XORP, including
the ICSI Center for Internet Research, Intel Corporation, the National
Science Foundation (ANI-0129541), and Microsoft Corporation.
We also sincerely thank Scott Shenker for believing in the work
against all odds.
- 1
-
T. Berners-Lee, L. Masinter, and M. McCahill.
Uniform resource locators.
RFC 1738,
Internet Engineering Task Force, December 1994.
- 2
-
Bird project.
The BIRD Internet Routing Daemon (Web site).
https://bird.network.cz/
.
- 3
-
V. J. Bono.
7007 explanation and apology, 1997.
https://www.merit.edu/mail.archives/nanog/1997-04/msg00444.html
.
- 4
-
Robert Braden, Ted Faber, and Mark Handley.
From protocol stack to protocol heap--Role-based architecture.
In Proc. 1st Workshop on Hot Topics in Networks (HotNets-I),
October 2002.
- 5
-
Nat Brown and Charlie Kindel.
Distributed Component Object Model Protocol - DCOM 1.0.
Online, November 1998.
Expired IETF draft draft-brown-dcom-v1-spec-02.txt.
- 6
-
Kenneth L. Calvert, James Griffioen, and Su Wen.
Lightweight network support for scalable end-to-end services.
In Proc. ACM SIGCOMM 2002 Conference, pages 265-278,
August 2002.
- 7
-
Cisco Systems.
Cisco IOS software.
https://www.cisco.com/public/sw-center/sw-ios.shtml
.
- 8
-
Cisco Systems.
Cisco IOS XR software.
https://www.cisco.com/en/US/products/ps5845/index.html
.
- 9
-
National Research Council.
Looking Over the Fence at Networks.
National Academy Press, 2001.
- 10
-
Christophe Diot, Brian Neil Levine, Bryan Lyles, Hassan Kassem, and Doug
Balensiefen.
Deployment issues for the ip multicast service and architecture.
IEEE Network, January/February 2000.
- 11
-
B. Dragovic, K. Fraser, S. Hand, T. Harris, A. Ho, I. Pratt, A. Warfield,
P. Barham, and R. Neugebauer.
Xen and the art of virtualization.
In Proc. 18th ACM Symposium on Operating Systems
Principles, October 2003.
- 12
-
D. Estrin, D. Farinacci, A. Helmy, D. Thaler, S. Deering, M. Handley,
V. Jacobson, C. Liu, P. Sharma, and L. Wei.
Protocol Independent Multicast--Sparse Mode (PIM-SM):
Protocol specification.
RFC 2362, Internet Engineering Task Force, June 1998.
ftp://ftp.ietf.org/rfc/rfc2362.txt
.
- 13
-
M. Handley, O. Hodson, and E. Kohler.
XORP: An open platform for network research.
In Proc. 1st Workshop on Hot Topics in Networks (HotNets-I),
October 2002.
- 14
-
A. Helmy.
Protocol indendent multicast-sparse mode (pim-sm) implementation
document, 1996.
https://netweb.usc.edu/pim/pimd/docs/
.
- 15
-
Juniper Networks.
JunOS software.
https://www.juniper.net/products/junos/
.
- 16
-
Eddie Kohler, Robert Morris, Benjie Chen, John Jannotti, and M. Frans Kaashoek.
The Click modular router.
ACM Trans. on Computer Systems, 18(3):263-297, August 2000.
- 17
-
Thomas Kunz.
Implementing bcast (implementation report).
https://www.sce.carleton.ca/wmc/code.html
, March 2004.
- 18
-
Zhuoqing Morley Mao, Ramesh Govindan, George Varghese, and Randy H. Katz.
Route flap damping exacerbates Internet routing convergence.
In Proc. ACM SIGCOMM 2002 Conference, August 2002.
- 19
-
David Mazières.
A toolkit for user-level file systems.
In Proc. USENIX 2001 Annual Technical Conference, pages
261-274, June 2001.
- 20
-
John Moy.
OSPF Complete Implementation.
Addison-Wesley, December 2000.
- 21
-
NextHop Technologies.
GateD releases (Web site).
https://www.gated.org/
.
- 22
-
Object Management Group.
Common Object Request Broker Architecture Specification 3.0.3,
March 2004.
https://www.omg.org/cgi-bin/doc?formal/04-03-12
.
- 23
-
Larry Peterson, Tom Anderson, David Culler, and Timothy Roscoe.
A blueprint for introducing disruptive technology into the
Internet.
In Proc. 1st Workshop on Hot Topics in Networks (HotNets-I),
October 2002.
- 24
-
Larry Peterson, Scott Shenker, and Jonathan Turner.
Overcoming the internet impasse through virtualization.
In Proc. 3rd Workshop on Hot Topics in Networks (HotNets-III),
November 2004.
- 25
-
Quagga project.
Quagga Routing Suite (Web site).
https://www.quagga.net/
.
- 26
-
Tammo Spalink, Scott Karlin, Larry Peterson, and Yitzchak Gottlieb.
Building a robust software-based router using network processors.
In Proc. 18th ACM Symposium on Operating Systems
Principles, pages 216-229, October 2001.
- 27
-
R. Teixeira, A. Shaikh, T. Griffin, and J. Rexford.
Dynamics of hot-potato routing in ip networks.
In Proc. 2004 ACM SIGMETRICS Conference on Measurement and
Modeling of Computer Systems, June 2004.
- 28
-
University of Michigan and Merit Network.
MRT: Multi-threaded Routing Toolkit (Web site).
https://www.mrtd.net/
.
- 29
-
Unix Manual Pages.
routed - network RIP and router discovery routing daemon.
- 30
-
David Wetherall.
Active network vision and reality: lessons from a capsule-based
system.
In Proc. 17th ACM Symposium on Operating Systems
Principles, pages 64-79, Kiawah Island, South Carolina, December 1999.
- 31
-
Zebra project.
GNU Zebra routing software (Web site).
https://www.zebra.org/
.
Footnotes
- ... Software1
-
This material is based upon work supported by the National Science
Foundation under Grant No. 0129541. Any opinions, findings, and
conclusions or recommendations expressed in the material are those of the
author(s) and do not necessarily reflect the views of the National Science
Foundation.
- ... Hodson2
- Orion Hodson is currently at Microsoft Research.
- ... process.3
- To allow direct comparison of
Intra-Process against TCP and UDP, both sender and receiver are
running within the same process. When we run the sender and receiver
on two separate processes on the same host, the performance is
very slightly worse.
|