|
NSDI '04 Paper
[NSDI '04 Technical Program]
Total Recall:
System Support for Automated Availability Management
Ranjita Bhagwan, Kiran Tati, Yu-Chung Cheng, Stefan Savage, and Geoffrey M. Voelker
Department of Computer Science and Engineering
University of California, San Diego
Availability is a storage system property that is both highly desired and
yet minimally engineered. While many systems provide
mechanisms to improve availability - such as redundancy and failure
recovery - how to best configure these mechanisms is typically left
to the system manager. Unfortunately, few individuals have the skills
to properly manage the trade-offs involved, let alone the
time to adapt these decisions to changing conditions. Instead, most
systems are configured statically and with only a cursory
understanding of how the configuration will impact overall
performance or availability. While this issue can be problematic
even for individual storage arrays, it becomes increasingly important
as systems are distributed - and absolutely critical for the wide-area
peer-to-peer storage infrastructures being explored.
This paper describes the motivation, architecture and implementation
for a new peer-to-peer storage system, called TotalRecall, that
automates the task of availability management. In particular,
the TotalRecall system automatically measures and estimates the
availability of its constituent host components, predicts their future
availability based on past behavior, calculates the appropriate
redundancy mechanisms and repair policies, and delivers
user-specified availability while maximizing efficiency.
Availability is a storage system property that is highly desired in
principle, yet poorly understood in practice. How much availability is
necessary, over what period of time and at what granularity? How likely
are failures now and in the future and how much redundancy is needed
to tolerate them? When should repair actions be initiated and how
should they be implemented? These are all questions that govern the
availability of a storage system, but they are rarely analyzed in depth or
used to influence the dynamic behavior of a system.
Instead, system designers typically implement a static set of
redundancy and repair mechanisms simply parameterized by resource
consumption (e.g., number of replicas). Determining how to configure
the mechanisms and what level of availability they will provide if
employed is left for the user to discover. Moreover, if the underlying
environment changes, it is again left to the user to reconfigure the
system to compensate appropriately. While this approach may be acceptable when
failures are consistently rare, such as for the individual drives in a
disk array (and even here the management burden may be
objectionable [23]), it quickly breaks down in large-scale
distributed systems where hosts are transiently inaccessible and
individual failures are common.
Peer-to-peer systems are particularly fragile in this respect as their
constituent parts are in a continual state of flux. Over short time
scales (1-3 days), individual hosts in such systems exhibit
highly transient availability as their users join and leave the system at
will - frequently following a rough diurnal pattern. In fact,
the majority of hosts in existing peer-to-peer systems are
inaccessible at any given time, although most are available over
longer time scales [4,19]. Over still longer
periods, many of these hosts leave the system permanently, as most
peer-to-peer systems experience high levels of churn in their overall
membership. In such systems, we contend that availability
management must be provided by the system itself, which can monitor
the availability of the underlying host population and adaptively
determine the appropriate resources and mechanisms required to provide
a specified level of availability.
This paper describes the architecture, design and implementation of a new
peer-to-peer storage system, called TotalRecall, that automatically
manages availability in a dynamically changing environment. By
adapting the degree of redundancy and frequency of
repair to the distribution of failures, TotalRecall guarantees
user-specified levels of availability while minimizing the overhead
needed to provide these guarantees. We rely on three key approaches
in providing these services:
- Availability Prediction. The system continuously monitors the
current availability of its constituent hosts. This measured data is
used to construct predictions, at multiple time-scales, about the
future availability of individual hosts and groups of hosts.
- Redundancy Management. Short time-scale predictions are
then used to derive precise
redundancy requirements for tolerating transient disconnectivity.
The system selects the most efficient redundancy mechanism based on
workload behavior and system policy directives.
- Dynamic Repair. Long time-scale predictions coupled with
information about current availability drive system
repair actions. The repair policy is dynamically selected as
a function of these predictions, target availability and system
workload.
TotalRecall is implemented in C++ using a modified version of
the DHash peer-to-peer object location service [8]. The system
implements a variety of redundancy mechanisms (including replication and
online coding), availability
predictors and repair policies. However, more significantly, the
system provides interfaces that allow new mechanisms and policies to
describe their behavior in a unified manner - so the system can
decide how and when to best use them.
The remainder of this paper describes the motivation, architecture and
design of the TotalRecall system. The following section motivates the
problem of availability management and describes key related work. In
Section 3 we discuss our availability architecture -
the mechanisms and policies used to ensure that user availability
requirements are met. Sections 4 describes the design
of the TotalRecall Storage System and its implementation.
Section 5 describes the TotalRecall File System, a NFS
file service implemented on the core storage system. In
Section 6, we quantitatively evaluate the
effectiveness of our system and compare it against existing
approaches. Finally, Section 7 concludes.
Motivation and Related Work
The implicit guarantee provided by all storage systems is that data,
once stored, may be recalled at some future point. Providing this
guarantee has been the subject of countless research efforts over the
last twenty years, and has produced a wide range of technologies
ranging from RAID to robotic tape robots. However, while the
efficiency of these techniques has improved over time and while the
cost of storage itself has dropped dramatically, the complexity of
managing this storage and its availability has continued to increase.
In fact, a recent survey analysis of cluster-based services suggests
that the operational cost of preparing for and recovering from failures
easily dominates the capital expense of the individual hardware
systems [17]. This disparity will only continue to increase
as hardware costs are able to reflect advances in technology and
manufacturing while management costs only change with increases in
human productivity. To address this problem, the management burden required to ensure availability must be shifted from individual system administrators to
the systems themselves. We are by no means the first to make
this observation.
A major source of our inspiration is early work
invested by HP into their AutoRAID storage array [23]. The
AutoRAID system provided two implementations of storage redundancy -
mirroring and RAID5 - and dynamically assigned data between them to
optimize the performance of the current workload. While this system did
not directly provide users with explicit control over availability it
did significantly reduce the management burden associated with
configuring these high-availability storage devices. A later HP
project, AFRAID, did allow user-specified
availability in a disk array environment, mapping availability requests into variable consistency
management operations [20].
In the enterprise context, several researchers have recently proposed systems to
automate storage management tasks. Keeton and Wilkes have described
a system designed to automate data protection decisions that is
similar in motivation to our own, but they focus on longer time scales
since the expected failure distribution in the enterprise is far less
extreme than in the peer-to-peer environment [10]. The WiND
system is being designed to automate many storage management tasks in a
cluster environment, but is largely focused on improving system
performance [2]. Finally, the PASIS project is exploring
system support to automatically make trade-offs between different
redundancy mechanisms when building a distributed file system [24].
Not surprisingly, perhaps the closest work to our own arises from the
peer-to-peer (P2P) systems community. Due to the administrative
heterogeneity and poor host availability found in the P2P environment,
almost all P2P systems provide some mechanism for ensuring data
availability in the presence of failures. For example, the CFS system
relies on a static replication factor coupled with an active repair
policy, as does Microsoft's FARSITE system (although FARSITE
calculates the replication factor as a function of total
storage and and is more careful about replica placement) [8,1,9]. The Oceanstore system uses a combination
of block-level erasure coding for long term durability and simple
replication to tolerate transient
failures [12,22]. Finally, a recent paper by
Blake and Rodrigues argues that the cost of dynamic membership makes
cooperative storage infeasible in the transiently available
peer-to-peer environments [5]. This finding is correct under
certain assumptions, but is not critical in the environments we
have measured and the system we have developed.
What primarily distinguishes TotalRecall from previous work is that we allow the user to specify a specific availability target and then automatically
determine the best mechanisms and policies to meet that request. In
this way, TotalRecall makes availability a first-class storage
property - one that can be managed directly and without a need to
understand the complexities of the underlying system infrastructure.
Availability Architecture
There are three fundamental parameters that govern the availability of
any system: the times at which components fail or become
unavailable, the amount of redundancy employed to tolerate these
outages and the time to detect and repair a failure.
The first of these is usually considered an independent parameter of
the system, governed primarily by the environment and external forces not under
programmatic control.1 The remaining
variables are dependent - they can be controlled, or at least
strongly influenced, by the system itself. Therefore,
providing a given level of availability requires predicting the
likelihood of component failures and determining how much
redundancy and what kind of repair policies will compensate
appropriately.
The remainder of this section discusses the importance of these issues
in turn, how they can be analyzed and how they influence system design
choices. The following section then describes our concrete design and
implementation of this overall architecture.
Availability Prediction
At the heart of any predictive approach to availability is the
assumption that past behavior can be used to create a stochastic model
of future outcomes. For example, ``mean-time-to-failure'' (MTTF)
specifications for disk drives are derived from established failure data for
similar components over a given lifetime. This kind of prediction can
be quite accurate when applied to a large group of fail-stop
components. Consequently, the future availability of single homogeneous disk
arrays can be statically analyzed at configuration time.
However, in a distributed storage system - particularly one with
heterogeneous resources and administration - this prediction can be
considerably more complex. First, since the hosts composing such
systems are rarely identical, the availability distribution cannot be
analytically determined a priori - it must be measured
empirically. Second, unlike disks, individual hosts in a distributed
system are rarely fail-stop. Instead, hosts may be transiently unavailable due
to network outages, planned maintenance or other local conditions.
Consequently, such hosts may become unavailable and then return to
service without any data loss. Finally, as such systems evolve, the
number of hosts populating the system may grow or shrink - ultimately changing
the availability distribution as well.
Nowhere is this issue more pronounced than in the public peer-to-peer
environment. In such systems, the availability of an individual host
is governed not only by failures, but more importantly by user decisions to
disconnect from the network. Several recent studies of peer-to-peer
activity have confirmed that individual hosts come and go at an incredible
rate. In one such study of hosts in the Overnet system, we have observed that each host joined and left the system over 6 times
per day on average [4]. In a similar study of Kazaa and Gnutella,
Saroiu et al. found that the median session duration of a peer-to-peer
system was only 60 minutes [19]. In addition to the transient
availability found in these systems, public peer-to-peer populations
exhibit a high rate of long-term churn as well. The previously-mentioned Overnet study
found that approximately 20 percent of active hosts permanently
departed from the system each day and roughly the same number of new
hosts joined as well.
Consequently, in the peer-to-peer context, storage systems face two
prediction requirements. First, the system must empirically measure
the short-term availability distribution of its host population on an
ongoing basis. We use this to model the probability of transient
disconnections - those typically having no impact on the durability
of data stored on disconnected hosts. From this distribution we
estimate the current likelihood that a set of hosts will be
available at any given time and subsequently determine the proper
amount of redundancy needed. Our second prediction requirement focuses
on non-transient failures that take stored data out of the system for
indefinite periods. Since hosts are leaving the system continuously,
redundancy is insufficient to ensure long-term storage availability.
Instead the system must predict when hosts have ``permanently'' left
the system (at least for long enough a period that they were no longer
useful in the short term) and initiate a repair
process.
Redundancy Management
In a peer-to-peer environment, each host may only be transiently
available. When connected, the data stored on a host contributes to
the overall degree of redundancy and increases the data's
availability; when disconnected, both the degree of redundancy and
data availability decreases. With sufficient redundancy across many
hosts, at any moment enough hosts will be in the system to make a given data item available with high probability. However, it is not trivially
clear how much redundancy is necessary for a given level of
availability or what redundancy mechanism is most appropriate for a
given context. We discuss both issues below.
There are a wide range of mechanisms available for producing redundant
representations of data. However, each mechanism has unique
trade-offs. For example, the simplest form of redundancy is pure
replication. It has low run-time overhead (a copy) and permits
efficient random access to sub-blocks of an object. However,
replication can be highly inefficient in low-availability environments
since many storage replicas are required to tolerate potential
transient failures. At the other extreme, optimal erasure codes are
extremely efficient. For a constant factor increase in storage cost,
an erasure-coded object can be recovered at any time using a subset of
its constituent blocks. However, the price for this efficiency is a
quadratic coding time and a requirement that reads and writes
require an operation on the entire object. By comparison, ``non-optimal'' erasure
codes sacrifice some efficiency for significantly reduced on-line
complexity for large files.
Finally, it is easy to
conceive of hybrid strategies as well. For example, a large
log file written in an append-only fashion, might manage the head of
the log using replication to provide good performance and eventually
migrate old entries into an erasure coded representation for provide
higher efficiency.
However, for all of these representations another question remains: how
much redundancy is required to deliver a specified level of
availability. More precisely: given an known distribution for
short-term host availability and a target requirement for
instantaneous data availability, how should these
mechanisms be parameterized? Below we provide analytic approximations to
these questions for pure replication and pure erasure coding. In both
cases, our approach assumes that host failures are independent over
short time scales. In previous work, we have provided a detailed
explanation of our stochastic analysis and its
assumptions [3], as well as experimental evidence to
support our independence assumption [16]. Consequently, the
TotalRecall system is not designed to survive catastrophic attacks or widespread
network failures, but rather the availability dynamics resulting from
localized outages, software crashes, disk failures and user dynamics.
Replication. Given a target level of availability
A (where A
represents the probability a file can be
accessed at any time)
and a mean host availability of  , we can calculate the
number of required replicas, , we can calculate the
number of required replicas,  , directly. , directly.
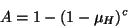 |
(1) |
Solving for c,
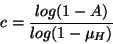 |
(2) |
Consequently, if mean host availability is 0.5, then it requires 10
complete copies of each file to guarantee a target availability of
0.999.
Some systems may choose to perform replication for individual
blocks, rather than the whole file, as this allows large files to
be split and balanced across hosts. However, this is rarely an
efficient solution in a low-availability environment since every block
(and hence at least one host holding each block) must be available for
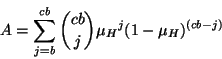
the file to be available. To wit, if a file is divided into  blocks, each of which has
blocks, each of which has  copies, then the availability of that
file is given by: copies, then the availability of that
file is given by:
 |
(3) |
Consequently, a given level of availability will require geometrically
more storage (as a function of  ) in the block-level replication
context. ) in the block-level replication
context.
Erasure coding. Given the number of blocks in a file
 , and the stretch factor , and the stretch factor  specifying the erasure code's redundancy
(and storage overhead) we can calculate the delivered
availability as: specifying the erasure code's redundancy
(and storage overhead) we can calculate the delivered
availability as:
 |
(4) |
If  is moderately large, we can use the normal approximation to the
binomial distribution to rewrite this equation and solve for is moderately large, we can use the normal approximation to the
binomial distribution to rewrite this equation and solve for  as: as:
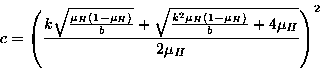 |
(5) |
More details on this equation's derivation can be found in [3].
For the same 0.999 level of availability used in the example above, an
erasure-coded representation only requires a storage overhead of 2.49.
However, the previous analyses only consider short-term availability - the
probability that at a given instant there is sufficient redundancy to
mask transient disconnections and failures. Over longer periods, hosts
permanently leave the system and therefore the degree of redundancy
afforded to an object will strictly decrease over time - ultimately
jeopardizing the object's availability. In response, the system must
``repair'' this lost redundancy by continuously writing additional
redundant data onto new hosts.
The two key parameters in repairing file data are the degree of
redundancy used to tolerate availability transients and how quickly the
system reacts to host departures. In general, the more redundancy
used to store file data, the longer the system can delay before
reacting to host departures.
Below we describe a spectrum of repair policies defined in terms of two
extremes: eager and lazy. Eager repair uses a smaller degree of
redundancy to maintain file availability guarantees by reacting to
host departures immediately, but at the cost of additional
communication overhead. In contrast, lazy repair uses additional
redundancy, and therefore additional storage overhead, to delay repair
and thereby reduce communication overhead.
Eager Repair
Many current research peer-to-peer storage systems maintain data
redundancy pro-actively as hosts depart from the system. For example,
the DHash layer of CFS replicates each block on five separate hosts [8].
When DHash detects that one of these hosts has left the system, it
immediately repairs the diminished redundancy by creating a new
replica on another host.
We call this approach to maintaining redundancy eager repair
because the system immediately repairs the loss of redundant data when
a host fails. Using this policy, data only becomes unavailable when
hosts fail more quickly than they can be detected and repaired.
The primary advantage of eager repair is its simplicity. Every time a
host departs, the system only needs to place redundant data on another
host in reaction. Moreover, detecting host failure can be implemented
in a completely distributed fashion since it isn't necessary to
coordinate information about which hosts have failed. However, the
eager policy makes no distinction between permanent departures that
require repair and transient disconnections that do not.
Consequently, in public peer-to-peer environments, many repair actions
may be redundant and wasteful. In Section 6 we show
via simulation that this overhead is very high for contemporary
peer-to-peer host populations.
Lazy Repair
An alternative to eager repair is to defer immediate repair and use
additional redundancy to mask and tolerate host departures for an
extended period.2 We call this approach lazy repair since the
explicit goal is to delay repair work for as long as possible.
The key advantage of lazy repair is that, by delaying action, it can
eliminate the overhead of redundant repairs and only introduce new
redundant blocks when availability is threatened.
However, lazy repair also has disadvantages. In particular, it must explicitly
track the availability of individual hosts and what data they carry.
This is necessary to determine when an object's availability is
threatened and a repair should be initiated. Consequently, the
system must maintain explicit metadata about which hosts hold
what data. By contrast, eager implementations can make use of the
implicit mappings available through mechanisms like consistent
hashing [8]. For small objects, this can significantly
increase the overhead of repair actions.
For lazy repair, the system must incorporate additional redundancy
for files so that it can tolerate host departures over an extended
period. Hence while the analysis in the previous section gives us the
short-term redundancy factor used to tolerate transient failures,
each file needs to use a larger long-term redundancy factor to
accommodate host failures without having to perform frequent file repairs.
As mentioned in Section 3.1, the system requires
an availability predictor that will estimate when a file needs to
be repaired. A simple predictor for lazy repair periodically checks
the total amount of available redundancy for a given file. If this value
falls below the short-term redundancy factor for the file, then the system
triggers a repair. Thus we also refer to the short-term redundancy factor
as the repair threshold for the file.
Section 6 compares
the repair bandwidth required by each policy using an empirical trace
of peer-to-peer host availability patterns.
System Policies
The combination of these mechanisms - prediction, redundancy and
repair - must ultimately be combined into a system-wide strategy for
guaranteeing file availability. Minimally, a system administrator
must specify a file availability target over a particular lifetime. From
these parameters, coupled with an initial estimate of host
availability, an appropriate level of redundancy can be computed. In
addition to repair actions triggered by the disappearance of
individual hosts, the system may occasionally need to trigger new
repair actions to compensate for changes in the overall availability of the
entire population. For example, a worm outbreak may reduce the average host
availability system-wide or the expansion of broadband access may
increase the average uptime of connected hosts.
However, there is significant room for more advanced policies. For
example, there is a clear trade-off between random access performance
and storage efficiency in the choice of redundancy mechanism. A
system policy can make this trade-off dynamically in response to
changing workloads. For instance, a file might use an erasure coded
base representation, but then replicate frequently accessed sub-blocks
independently. As well, system policies could easily specify different
availability requirements for different portions of the file system
and even calculate availability as a function of file dependencies
(e.g., a user may wish to request a given level of availability for
the combination of the mail program and the mail spool it uses).
TotalRecall Storage System
This section describes the design and implementation of the TotalRecall
Storage System. The TotalRecall Storage System implements the availability
architecture described in Section 3 in a cooperative
host environment. It provides a simple read/write storage interface
for maintaining data objects with specified target availability
guarantees.
Figure 1:
TotalRecall system architecture.
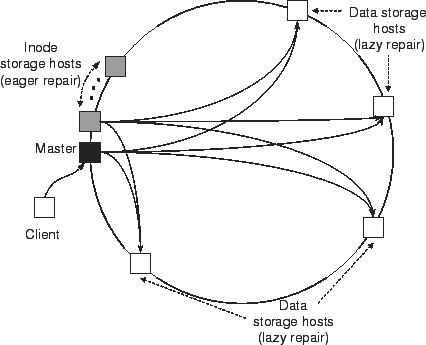 |
Hosts in TotalRecall contribute disk resources to the system and
cooperatively make stored data persistent and available.
Figure 1 shows an overview of TotalRecall with
participating hosts organized in a ring ID space. TotalRecall stores and
maintains data objects, conveniently referred to as files.
Files are identified using unique IDs. The system uses these IDs to
associate a file with its master host, the host responsible for
maintaining the persistence, availability, and consistency of the
file. Storage hosts persistently store file data and metadata
according to the repair policy the master uses to maintain file
availability. Client hosts request operations on a file.
Clients can send requests to any host in the system, which routes all
requests on a file to its master. As a cooperative system, every
TotalRecall host is a master for some files and storage host for others;
hosts can also be clients, although clients do not need to be TotalRecall
hosts.
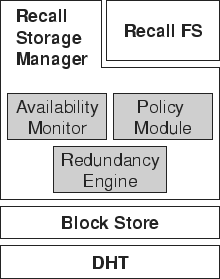
A TotalRecall server runs on every host in the system. As shown in
Figure 2, the TotalRecall host architecture has three layers.
The TotalRecall Storage Manager handles file requests from clients and
maintains file availability for those files for which it is the
master. It uses the Block Store layer to read and write data blocks
on storage hosts. The Block Store in turn uses an underlying
distributed hash table (DHT) to maintain the ID space and provide
scalable lookup and request routing.
Storage Manager
The TotalRecall Storage Manager (TRSM) implements the availability
architecture described in Section 3. It has three
components, the policy module, the availability monitor, and the
redundancy engine (see Figure 2).
The TRSM invokes the policy module when clients create new files or
substantially change file characteristics such as size. The policy
module determines the most efficient strategy for maintaining stored
data with a target availability guarantee. The strategy is a
combination of redundancy mechanism, repair policy, and number of
blocks used to store coded data. It chooses the redundancy mechanism
(e.g., erasure coding vs. whole-file replication) based on workload
characteristics such as file size and the rate, ratio, and access
patterns of read and write requests to file data
(Section 3.4). The repair policy determines how
the TRSM maintains data availability over long-term time scales to
minimize repair bandwidth for a target level of availability
(Section 3.3). Although redundancy and repair are
orthogonal, for typical workloads TotalRecall uses replication and eager
repair for small files and erasure coding and lazy repair for large
files (Section 6.3.1). Finally, with lazy repair
the policy module also determines the number of blocks to use with
erasure coding to balance file availability and communication
overhead; more blocks increases availability but requires the TRSM to
contact more storage hosts to reconstruct the
file [3].
Figure 2:
TotalRecall host architecture.
 |
The TRSM dynamically adapts its mechanisms and policies for
efficiently maintaining data according to the availability of hosts in
the system. To do this, the availability monitor (AM) tracks host
availability, maintains host availability metrics that are used by
other components, and notifies the redundancy engine when the system
reaches availability thresholds that trigger repair. The AM tracks
the availability of the storage hosts storing the metadata and data
for those files for which it is the master. Based upon individual
host availability, the AM maintains two metrics: short-term host
availability and long-term decay rate
(Section 3.1). Short-term host availability
measures the minimum average of all tracked hosts that were available
at any given time in the past 24 hours (e.g., 50% of hosts were
available at 4am). It is a conservative prediction of the number of
hosts available over the course of a day. Long-term decay rate
measures the rate at which hosts leave the system over days and weeks,
and is used to predict the frequency of repair. Finally, the TRSM
registers to receive events from the AM whenever the availability of a
set of storage hosts drops below a specified threshold to trigger
repairs.
Whereas the policy module decides what kind of
redundancy mechanism to use based upon high-level workload
characteristics, the redundancy engine (RE) implements the redundancy
mechanisms and determines how much short-term and long-term redundancy
to use for a file based upon current system conditions. The TRSM
invokes the redundancy engine when writing and repairing files. The
RE currently supports simple replication and erasure coding. For
replication, the RE uses Equation 2 in
Section 3.2 to determine the number of replicas  to create when storing the file. It uses the target availability
to create when storing the file. It uses the target availability  associated with the file and the short-term host availability from the
AM as inputs to the equation. For erasure coding, the RE uses
Equation 5 to determine the short-term redundancy
associated with the file and the short-term host availability from the
AM as inputs to the equation. For erasure coding, the RE uses
Equation 5 to determine the short-term redundancy
 (also called repair threshold) for encoding the file. It
uses the target availability (also called repair threshold) for encoding the file. It
uses the target availability  associated with the file, the
short-term host availability from the AM, and the number of blocks associated with the file, the
short-term host availability from the AM, and the number of blocks  determined by the policy module as inputs to the equation.
determined by the policy module as inputs to the equation.
For every file, the TotalRecall Storage Manager uses inodes as
metadata to locate file data and maintain file attributes such as
target availability, size, version, etc. It stores inodes for all
files using replication and eager repair. The master stores inodes
itself and a set of replicas on its successors, much like DHash
blocks [8], and the redundancy engine determines the number of
replicas (Section 4.2). Figure 1
shows an example of storing an inode for a lazily repaired file. The
master updates inodes in place, and it serializes all operations on
files by serializing operations on their inodes (e.g., a write does
not succeed until all inode replicas are updated).
The TRSM stores data differently depending upon the repair policy used
to maintain file availability. For files using eager repair, the TRSM
on the master creates a unique file data ID and uses the DHT to lookup
the storage host responsible for this ID. It stores file data on this
storage host and its successors in a manner similar to inodes. The
inode for eagerly repaired files stores the file data ID as a pointer
to the file data.
For files using lazy repair, the TRSM stores file data on a randomly
selected set of storage hosts (Section 3.3.2).
Figure 1 also shows how the master stores file data
for lazily repaired files. It stores the IDs of the storage hosts in
the file's inode to explicitly maintain pointers to all of the
storage hosts with the file's data. It also uses the redundancy
engine to determine the number of storage hosts to use, placing one
block (erasure coding) or replica (replication) per storage host.
File data is immutable. When a client stores a new version of a file
that is lazy repaired, for example, the TRSM randomly chooses a new
set of storage hosts to store the data and updates the file's inode
with pointers to these hosts. The TRSM uses the version number stored
in the inode to differentiate file data across updates. A garbage
collection process periodically reclaims old file data, and a storage
host can always determine whether its file data is the latest version
by looking up the inode at the master (e.g., when it joins the system
again after being down).
The TotalRecall Storage Manager implements the storage API. The API
supports operations for creating, opening, reading, writing, and
repairing files, and similar operations for inodes. All request
operations on a file are routed to and handled by the file's master.
Lacking the space to detail all operations, we highlight the semantics
of a few of them.
Clients use tr_create to create new files, specifying a target
availability  for the file upon creation. It is essentially a
metadata operation that instantiates a new inode to represent the
file, and no data is stored until a write operation happens. tr_read returns file data by reading data from storage hosts,
decoding erasure-coded data when appropriate. tr_write stores
new file data or logically updates existing file data. It first sends
the data to storage hosts and then updates the inode and inode
replicas (see Section 4.5). For lazily repaired
files, encoding and distributing blocks for large files can take a
considerable amount of time. To make writes more responsive, the
master uses a background process that performs the encoding and block
placement offline. The master initially eagerly repairs the blocks
using simple replication, and then erasure codes and flushes these
blocks out to the storage hosts. for the file upon creation. It is essentially a
metadata operation that instantiates a new inode to represent the
file, and no data is stored until a write operation happens. tr_read returns file data by reading data from storage hosts,
decoding erasure-coded data when appropriate. tr_write stores
new file data or logically updates existing file data. It first sends
the data to storage hosts and then updates the inode and inode
replicas (see Section 4.5). For lazily repaired
files, encoding and distributing blocks for large files can take a
considerable amount of time. To make writes more responsive, the
master uses a background process that performs the encoding and block
placement offline. The master initially eagerly repairs the blocks
using simple replication, and then erasure codes and flushes these
blocks out to the storage hosts.
The TRSM also implements the tr_repair operation for repairing
file data, although its execution is usually only triggered internally
by the availability manager. For eager repair, tr_repair
repairs data redundancy immediately when a host storing data departs.
For lazy repair, it only repairs data when the number of hosts storing
file data puts the file data at risk of violating the file's target
availability. Since this occurs when much of the file's data is on
hosts that are not available, tr_repair essentially has the
semantics of a file read followed by a write onto a new set of hosts.
Consistency
Since the system maintains replicas of inodes and inodes are updated
in place, the master must ensure that inode updates are consistent.
In doing so, the system currently assumes no partitions and that the
underlying DHT provides consistent routing -- lookups from different
hosts for the same ID will return the same result.
When writing, the master ensures that all data writes complete before
it updating the inode. The master writes all redundant data to the
storage hosts, but does not start updating the inode until all the
storage hosts have acknowledged their writes. If a storage host does
fail during the write, the master will retry the write on another
storage host. Until all data writes complete, all reads will see the
older inode and, hence, the older version of the file. As the master
makes replicas of the inode on its successors, it only responds that
the write has completed after all successors have acknowledged their
writes. Each inode stores a version number assigned by the master
ordered by write requests to ensure consistent updates to inode
replicas. Once a successor stores an inode replica, eager repair of
the inode ensures that the replica remains available. If the master
fails as it updates inodes, the new master will synchronize inode
versions with its successors. If the master fails before
acknowledging the write, the host requesting the write will time out
and retry the write to the file. A new master will assume
responsibility for the file, receive the write retry request, and
perform the write request. As a result, once a write completes, i.e.,
the master has acknowledged the write to the requester, all subsequent
reads see the newest version of the file.
Implementation
We have implemented a prototype of the TotalRecall storage system on Linux
in C++. The system consists of over 5,700 semi-colon lines of new
code. We have also reused existing work in building our system. We
use the SFS toolkit [14] for event-driven
programming and MIT's Chord implementation as the underlying
DHT [21]. Files stored using eager repair use a modified
version of the DHash block store [8].
The prototype implements all components of the TotalRecall Storage Manager,
although some advanced behavior remains future work. The prototype
policy module currently chooses the redundancy mechanism and repair
policy solely based on file size: files less than 32 KB use
replication and eager repair, and larger files use erasure coding and
lazy repair. For lazy repair, files are fragmented into a minimum of
32 blocks with a maximum block size of 64 KB. To erasure code lazily
repaired files, the redundancy engine implements Maymounkov's online
codes [13], a sub-optimal linear-time erasure-coding
algorithm. The redundancy engine also uses a default constant long-term
redundancy factor of 4 to maintain lazy file availability during the
repair period.
The availability monitor tracks host availability by periodically
probing storage hosts with an interval of 60 seconds. This approach
has been sufficient for our experiments on PlanetLab, but would
require a more scalable approach (such as random
subsets [11]) for tracking and disseminating
availability information in large-scale deployments. The TRSM uses
the probes to storage hosts for a file to measure and predict that file's
availability. Based upon storage host availability, the TRSM
calculates the amount of available redundancy for the file. The
available redundancy for the file is the ratio of the total number of
available data blocks (or replicas) to the total number of data blocks
(replicas) needed to read the file in its entirety. When this value
drops below the repair threshold, the AM triggers a callback to the
TRSM, prompting it to start repairing the file. The prototype
by default uses a repair threshold of 2. With a long-term redundancy
factor of 4 for lazy repair, for example, when half of the original
storage hosts are unavailable the AM triggers a repair.
In building our prototype, we have focused primarily on the issues key
to automated availability management, and have not made any
significant effort to tune the system's runtime performance.
Addressing run-time overheads, as well as implementing more advanced
performance and availability tradeoffs in the policy module, remains
ongoing work.
TotalRecall File System
The TotalRecall Storage System provides a core storage service on which more
sophisticated storage services can be built, such as backup systems,
file-sharing services, and file systems. We have designed one such
service, the TotalRecall File System (TRFS), an NFSv3-compatible file
system [7]. To provide this service, the TotalRecall File System
extends the Storage Manager with the TRFS Manager (see
Figure 2). The TRFS Manager extends the storage system
with file system functionality, implementing a hierarchical name
space, directories, etc. It extends the TotalRecall Storage Manager with an
interface that roughly parallels the NFS interface, translating file
system operations (e.g., mkdir) into lower-level TRSM operations.
Clients use a TRFS loopback server to mount and access TRFS file
systems. The loopback server runs on the client as a user-level file
server process that supports the NFSv3
interface [14]. It receives redirected NFS
operations from the operating system and translates them into RPC
requests to TotalRecall.
We have implemented TRFS as part of the TotalRecall prototype, adding 2,000
lines of code to implement the TRFS Manager and loopback server. It
currently supports all NFSv3 operations except hard links.
Experimental Evaluation
In this section, we evaluate TotalRecall using both trace-driven simulation
and empirical measurements of our prototype implementation. We use
simulation to study the effectiveness of our availability predictions,
the behavior of the system as it maintains file availability, the
tradeoffs among different repair policies, and TotalRecall's use of
bandwidth resources to maintain file availability. And we evaluate
the prototype implementation of the TotalRecall File System on a 32-node
deployment on PlanetLab and report both per-operation microbenchmarks
and results from the modified Andrew benchmark.
Simulation Methodology
Our simulator, derived from the well-known Chord simulation
software [21], models a simple version of the TotalRecall Storage
System. In particular, it models the availability of files across
time as well as the bandwidth and storage used to provide data and
metadata redundancy. The simulator is designed to reveal the demands
imposed by our system architecture and not for precise prediction in a
particular environment. Consequently, we use a simple model for host
storage (infinite capacity) and the network (fixed latency, infinite
bandwidth, no congestion).
Table 1:
File workloads used to parameterize simulation.
|
Hosts |
5500 |
|
Files |
5500 |
|
No. of Blocks Before Encoding |
32 |
|
File Sharing File Sizes |
4 MB (50%), 10 MB (30%), 750 MB (20%) |
|
File System File Sizes |
256 B (10%), 2 KB (30%), 4 KB (10%), 16 KB (20%), 128 KB (20%), 1 MB (10%) |
|
To drive the simulator we consider two different file workloads and
host availability traces. The two file workloads, parameterized in
Table 1, consist of a File Sharing workload
biased towards large files [18] and a more traditional
File System workload with smaller files [6].
Similarly, we use two corresponding host availability traces. The File
Sharing trace is a scaled down version of a trace of host availability
in the Overnet file sharing system [4], while the File System
availability trace is synthetically generated using the host availability
distribution in [6]. The two availability traces
are both one week long and differ primarily in their dynamics: the File
Sharing trace has an average host uptime of 28.6 hours, compared to 109
hours in the File System trace.
The simulations in this section execute as follows. Hosts join and
leave the system, as dictated by the availability trace, until the
system reaches steady-state (roughly the same number of joins as
leaves). Then files are inserted into the system according to the
file workload. Subsequent joins and leaves will cause the system to
trigger repair actions when required. The system
repairs inodes eagerly, and data eagerly or lazily depending on policy
(Section 4.6). From the simulation we can then determine the
delivered file availability and bandwidth usage: the two primary
metrics we evaluate.
Figure 3:
Empirical file availability calculated for the File Sharing host availability distribution.
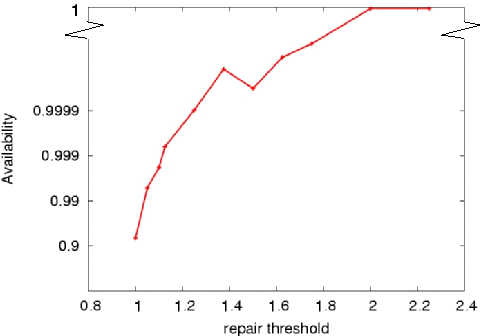 |
It is critical that TotalRecall is able to deliver the level of availability
requested. To verify, we specify a target availability of 0.99 and
from this compute the required repair threshold. Using
Equation 4 with an average host availability of 0.65,
we compute that an erasure coded file with
lazy repair will require a repair threshold of at least 2 to meet the
availability target.
To see how well this prediction holds, we simulate a series of
periodic reads to all 5500 files in the File Sharing workload. Using
the associated host availability trace to drive host failures, we then
calculate the average file availability as the ratio of completed
reads to overall requests. Figure 3 shows how this
ratio varies with changes in the repair threshold (this assumes a
constant long-term redundancy factor of 4). From the graph, we see
that files with a repair threshold of 2 easily surpass our 0.99
availability target. For this trace a lower repair threshold could
also provide the same level of availability, although doing so would
require more frequent file repairs.
To provide better intuition for this dynamic,
Figure 4 shows the repair behavior of TotalRecall over
time at a granularity of 60 minutes. We use the File Sharing workload
parameters in Table 1 to parameterize the system and
the File Sharing host availability trace to model host churn. The three
curves on the graph show the number of available hosts, the bandwidth
consumed by the system, and the average normalized available file
redundancy across all files in each time interval. Available file
redundancy measures the amount of redundant data that the system has
available to it to reconstruct the file. For each file, we normalize
it with respect to the long-term redundancy factor used for the file,
so that we can compute an average over all files.
Figure 4:
System behavior on the File Sharing workload.
 |
Looking at the curves over time, we see how TotalRecall uses lazy repair
to maintain a stable degree of data redundancy as host availability
varies substantially over time. Note that though the total number of
hosts available at any time is roughly between 800 and 1000, new hosts are
constantly joining the system while old hosts leave, causing substantial
amounts of host churn. We make three observations of the system behavior.
First, we see that system bandwidth varies with host availability.
As hosts leave the system, TotalRecall eagerly repairs inodes and lazily repairs
data blocks for those files whose predicted future availability drops
below the lazy repair threshold. Consequently, relative system bandwidth
increases as the number of hosts decreases. As hosts join the system,
TotalRecall eagerly repairs inodes but does not need to repair data blocks.
Consequently, relative system bandwidth decreases as the number of
hosts increases.
Second, the normalized average degree of available redundancy reaches and
maintains a stable value over time, even with substantial host churn.
This behavior is due to the design of the lazy repair mechanism.
Files stored using a lazy repair policy experience cyclic behavior
over time. When the system first stores a file using lazy repair, it
places all of the redundant data blocks on available hosts. At this
time, the file has maximum available redundancy (since we create all
files at time 0, all files have maximum available redundancy at time
0 in Figure 4). As hosts leave the system,
file blocks become unavailable. As hosts join the system again, file
blocks become available again. As a result, available file redundancy
fluctuates over time. But the long-term trend is for blocks to become
unavailable as hosts depart the system for extended periods of time
(possibly permanently). Eventually, based upon TotalRecall's prediction
of future host availability and current available file redundancy
(Section 3.1), enough blocks will become
inaccessible that the system will trigger a lazy repair to ensure
continued file availability. Lazy repair will replace missing redundant
blocks and raise available file redundancy back to its maximum, and the
cycle continues.
Third, the overall average system repair bandwidth for the entire time
duration is 35.6 MB/s. Dividing by the number of files, the average
repair bandwidth per file is 6.5 KB/s. While this is not
insignificant, we believe that, given the large file sizes in the File
Sharing workload (20% 750MB), this figure is reasonably small. Also,
note that using larger long-term redundancy factors has the effect of
reducing the bandwidth usage of the system
(Figure 5). Breaking down bandwidth overhead by
use, overall 0.6% of the bandwidth is used for eager repair of inodes
and 99.4% is used for lazy repair of data blocks
.
Repair Overhead
A key design principle of TotalRecall is to adapt the use of its repair
policies to the state of the system. These policies have various
tradeoffs among storage overhead, bandwidth overhead, and performance,
and interact with the distributions of host availability and file
sizes as well. Finally, TotalRecall efficiency hinges on accurate
prediction of future failures. We investigate these issues in turn.
Repair Policy
To illustrate the tradeoff between storage and bandwidth, we simulate
the maintenance of the File Sharing workload on TotalRecall and measure the
bandwidth required to maintain file availability using the File
Sharing host availability trace to model host churn. (Note that we do
not include the bandwidth required to write the files for the first
time.) We measure the average bandwidth required by each node to
maintain its inode and data blocks across the entire trace for five
different repair policies: eager repair, and lazy repair with erasure
coded data using four different long-term redundancy factors.
Figure 5:
CDF of the bandwidth usage of hosts in TotalRecall for different repair policies.
 |
Figure 5 shows the cumulative distribution
function of the average bandwidth consumed by the hosts in the system
over the trace for the different repair policies. From the graph, we
see that eager repair requires the most maintenance bandwidth across
all hosts, lazy repair with a long-term redundancy factor of 4
requires the second-most bandwidth, and larger long-term redundancy
factors require progressively less bandwidth. These results
illustrate the fundamental tradeoffs between redundancy and repair
bandwidth. Eager repair, which uses convenient but minimal
redundancy, cannot delay repair operations and requires the most
bandwidth. Lazy repair, which uses more sophisticated redundancy to
delay repair, requires less bandwidth, especially with significant
host churn as in the File Sharing scenario. Lazy repair with lower
long-term redundancy factors require less storage, but more frequent
repair. Higher long-term redundancy factors delay repair, but require
more storage.
The shapes of the curves in Figure 5 show how the
bandwidth requirements vary across all of the hosts in the system for
the different repair policies. Eager repair essentially has a uniform
distribution of bandwidth per node across all hosts. This is mainly
due to the fact that hosts are assigned random IDs. Consequently, hosts
leave and join the system at random points in the DHT, and the load of
making replicas of inodes and file blocks is well distributed among
all the hosts in the system.
In contrast, lazy repair essentially has two categories of hosts. The
first is all the hosts that store some file data blocks. The second
are hosts that join and leave the system before any file repairs are
triggered, do not receive any file data, and participate only in the
eager repair of inodes. As a result, the bandwidth usage of these
hosts is smaller than those that store data. For larger long-term
redundancy factors such as 8 and 10, file repairs are not that
frequent, and hence there are a significant number of hosts that fall
into the second category. Curves for these long-term redundancy
factors in Figure 5 have a sharp rise around 30
bytes per second, demonstrating the presence of an increasing number
of such hosts with increasing long-term redundancy factor.
Figure 6:
CDF of the bandwidth usage of hosts comparing replication
and erasure coding for lazy repair.
 |
So far we have concentrated on evaluating lazy repair with erasure coding.
We now study how lazy repair with coding compares with lazy repair
with replication. The question that this experiment seeks to answer is
that for the same level of file availability and storage, how does
the bandwidth usage of lazy repair with coding compare to the bandwidth
usage of lazy repair with replication.
To maintain a file availability of 0.99, Equations 3
and 4 estimate that lazy repair with erasure coding has a
repair threshold of 2 and lazy repair with replication requires 5
replicas. In other words, the system needs to repair files with
erasure coding when the redundancy (degree of coded data) falls below
2, and the system would have to perform repairs with replication when
the available redundancy (number of replicas) falls below 5. Lazy
repair with replication therefore potentially uses more bandwidth than
lazy repair with erasure coding.
To quantify how much more bandwidth replication uses, we repeat the
bandwidth measurement simulation experiment but assign a long-term
redundancy factor of 10 to each file. For lazy repair with coding,
the system performs a file repair when the file redundancy falls to 2
and, for lazy repair with replication, the system repairs the file
when the redundancy falls to 5. Figure 6 shows the
CDF of bandwidth required per host for these two cases. From the
graph, we see that the system bandwidth requirements to perform lazy
repair with replication are far higher than that required for lazy
repair with erasure codes. The average bandwidth per host for lazy
repair with erasure coding is 655 Bps, while lazy repair with
replication is 75 KBps. Our conclusion from these experiments is that
for large file size distributions, and for highly dynamic and highly
unavailable storage components, lazy repair with erasure coding is the
more efficient availability maintenance technique.
Host Availability
To study the affect of different host availability distributions on
bandwidth usage, we compared the bandwidth consumed for each host for
the File Sharing host availability trace with that of the File System
trace.
Figure 7:
CDF of the bandwidth usage of hosts comparing eager and lazy repair on different workloads.
 |
Figure 7 shows that the File System
availability trace requires less bandwidth and that lazy repair works
particularly well. Since the availability of hosts is higher for this
trace, the host churn is lower. Moreover, the source of this trace
was collected from a workplace, and as a result we see a more cyclic
pattern of availability for some hosts. These hosts contribute to
eager repair bandwidth usage since they increase the churn in the
system. However, since they cyclically re-appear in the system, they
do not trigger lazy repair.
The repair policy for a file depends on file size
(Section 4.2). To illustrate the tradeoff between eager
and lazy repair on file size, we measure the bandwidth usage per file
in the system with both eager and lazy repair, for both File Sharing
and File System host availability traces, for various file sizes.
Figure 8:
Per-file bandwidth required for repair.
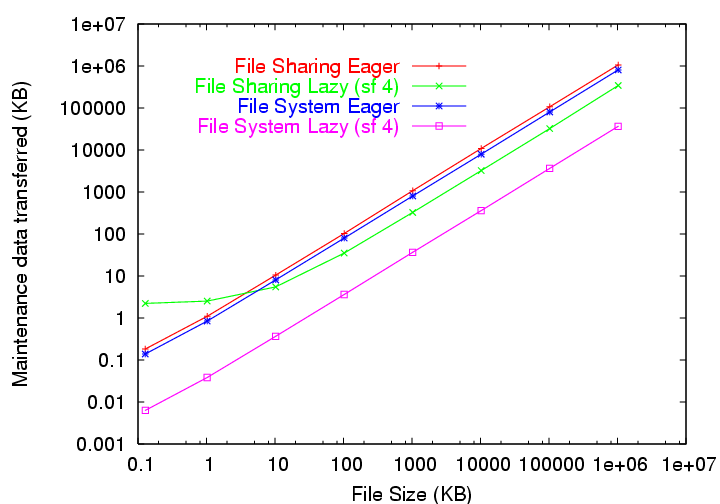 |
Figure 8 shows the average system bandwidth
for maintaining each file for the entire trace for a range of file
sizes. For each host availability trace, the graph shows two curves,
one where the system maintains files using eager repair and the other
where the system uses lazy repair. From the graph, we see that, for
the File Sharing trace, eager repair requires less bandwidth to
maintain small files less than approximately 4 KB in size, but that
lazy repair requires less bandwidth for all larger files. This
crossover between eager and lazy is due to the larger inodes required
for lazy repair. For the File System trace however, we do not see a
crossover point. Since the trace has less churn, fewer repairs are
required and less bandwidth is consumed for eager repair. Eager
repair is better for smaller file sizes and higher host
availability.
Figure 9:
CDF of the bandwidth usage per host for lazy repair and the hybrid policy.
 |
To see the effect of using a hybrid repair policy, i.e., using eager
repair for files smaller than 4 KB and lazy for all others, we
simulated the File System workload on TotalRecall using the File Sharing and
the File System host traces. Figure 9
shows the CDF of average bandwidth usage per host for pure lazy repair
and the hybrid policy, and for both host availability traces. There is
very little difference in the bandwidth usage between the two curves
for the same host trace. From this we conclude that, for small files,
TotalRecall should use eager repair. While bandwidth usage is comparable to
that for lazy repair, the performance will be better since the system
avoids the computational overhead of encoding/decoding these files and
also avoids the communication overhead of distributing them over many
storage hosts.
Figure 10:
CDF of the bandwidth usage per host comparing TotalRecall with an optimal system.
 |
Though we have established that lazy repair with erasure coding is
the most efficient availability maintenance technique in our system,
we would like to see how close TotalRecall comes to optimal bandwidth usage in
the system. The question we address is, if there existed an Oracle that
would repair a file
just before it becomes unavailable, how would the
system's bandwidth usage characteristics compare to those of TotalRecall?
To answer this question, we compare TotalRecall's bandwidth consumption
using lazy repair and erasure coding to that of an optimal system that
also uses lazy repair and erasure coding. The optimal system
minimizes bandwidth by performing repairs just before the files become
unavailable. Note that a file becomes unavailable when its redundancy
drops below 1 (less data available than originally in the file). To
model the optimal system, we modified the simulator so that whenever
the availability monitor detected that a file's redundancy dropped
below 1, it would initiate a repair. In contrast, TotalRecall initiates
file repair whenever the file's redundancy drops just below the repair
threshold of 2. Both TotalRecall and the optimal simulator use a long-term
redundancy factor of 4 for this experiment.
Figure 10 shows the results of this experiment. The
bandwidth usage in TotalRecall is almost an order of magnitude more than the
optimal system. While the average bandwidth usage in TotalRecall is 49 KBps,
the optimal system is 7 KBps. The difference is due to two reasons.
First, it is very difficult to predict host behavior accurately given
the strong dynamics in the system. Second, TotalRecall's main goal is to
guarantee availability of files, and in doing so, it tends to make
conservative estimates of when file repairs are required. We believe
this to be a suitable design decision given the system's goals.
However, this experiment does show that there is room for the system
to improve its bandwidth usage by using more sophisticated techniques
to predict host failures and file availability.
Prototype Evaluation
The simulation experiments focused on the file availability and
bandwidth overhead of providing available files in the TotalRecall Storage
System. Next, we evaluate the performance of the prototype TotalRecall File
System implementation. To perform our measurements, we ran TRFS on a
set of 32 PlanetLab hosts distributed across the U.S. We used a local
machine as a client host mounting the TotalRecall File System via the TRFS
loopback server. In all experiments below, the system uses an eager
repair threshold of 32 KB, i.e., the system replicates and
eager-repairs all files smaller than 32 KB, and it uses erasure coding
and lazy repair for all files of size greater than 32 KB. For lazy
repair, the system uses a long-term redundancy factor of 4.
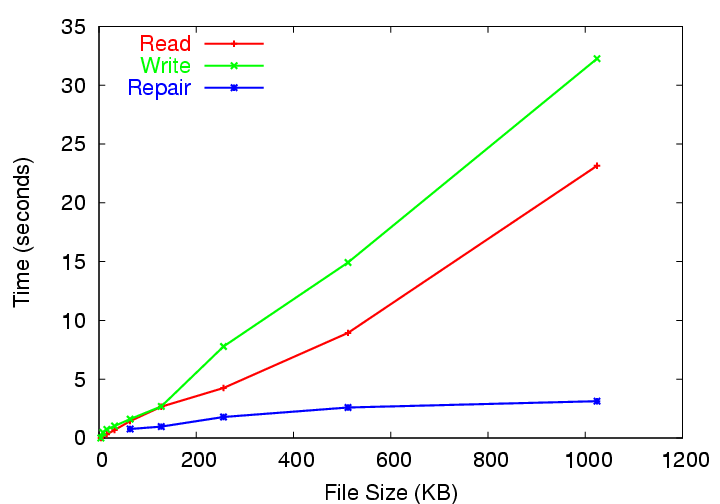
Figure 11:
File system performance on PlanetLab.
 |
Microbenchmarks
We first evaluate the TotalRecall File System by measuring the performance
of file system operations invoked via the NFS interface.
Figure 11 shows the sequential file read,
write, and repair performance for lazily repaired files in TRFS
running on the 32 PlanetLab hosts for a range of file sizes. First,
we measured the performance of using the NFS interface to write a file
of a specified size using a simple C program. We then measured the
performance of the same program reading the file again, making sure
that no cached data was read. Finally, we forced the master node
responsible for the file to perform a lazy repair. Lazy repair
roughly corresponds to a combined read and write: the master node
reads a sufficient number of file blocks to reconstruct the file, and
then writes out a new encoded representation of the file to a new set
of randomly chosen nodes.
From the graph, we see that write performance is the worst. Writes
perform the most work: writing a file includes creating and storing
inodes, encoding the file data, and writing all encoded blocks
to available hosts.
Read performance is better because the master node need only read a
sufficient number of blocks to reconstruct the file. Since this
number is smaller than the total number of encoded blocks stored
during a write read operations require fewer RPC operations to reconstruct
the file.
Finally, lazy repair performs the best of all. Although
this might seem counterintuitive since the lazy repair operation
requires more work than read or write, lazy repair operates within the
TotalRecall Storage System. As a result, it is able to operate in parallel
on much larger data aggregates than the read and write operations.
NFS serializes read operations, for example, in 4KB block requests to
the master. However, when the master reads blocks to perform a lazy
repair, it issues 64KB block requests in parallel to the storage
hosts.
Table 2:
Wide-area performance of the modified Andrew benchmark on 32 PlanetLab nodes.
|
Phase |
Duration (s) |
|
mkdir |
12 |
|
create/write |
60 |
|
stat |
64 |
|
read |
83 |
|
compile |
163 |
|
Total |
392 |
|
We also ran the modified Andrew benchmarks on TRFS on 32 hosts on
PlanetLab. We chose hosts that were widely distributed across the
U.S. Table 2 shows the results of running these
benchmarks on TotalRecall. We see that the read phase of the benchmark takes
longer than the write phase. Since the benchmark primarily consists
of small files that are eagerly-repaired and replicated in our system,
the writes take less time than if they were erasure coded. The
compile phase, however, takes a fair amount of time since the final
executable is large and it is erasure-coded and lazy-repaired. The
total time of execution of the benchmarks was 392 seconds. As one
point of rough comparison, we note that in [15] the authors
evaluated the Ivy peer-to-peer file system on 4 hosts across the
Internet using the same benchmark with a total execution time of 376
seconds.
The absolute performance of the TotalRecall File System is not remarkable,
and not surprising since we have not focused on performance. In part
this is due to the wide variance in the underlying network performance
of the PlanetLab hosts used in our experiments (e.g., 25% of the
nodes have RPC latency over 100 ms) and time spent in software layers
underneath TotalRecall (e.g., 87% of the time writing 4 KB files in
Figure 11 is spent in Chord lookups and block
transfers from storage hosts). Given that our implementation is an
unoptimized prototype, we are also exploring optimizations to improve
performance, such as aggregating and prefetching data between clients
and the master to improve NFS performance.
Conclusions
In this paper, we have argued that storage availability management is a
complex task poorly suited to human administrators. This is
particularly true in the large-scale dynamic systems found in
peer-to-peer networks. In these environments, no single assignment of
storage to hosts can provide a predictable level of availability over
time and naive adaptive approaches, such as eager replication, can be
grossly inefficient.
Instead, we argue that availability should become a first class system
property - one specified by the user and guaranteed by
the underlying storage system in the most efficient manner possible.
We have proposed an architecture in which the storage system predicts
the availability of its components over time, determines the
appropriate level of redundancy to tolerate transient outages, and
automatically initiates repair actions to meet the user's
requirements. Moreover, we have described how key system parameters,
such as the appropriate level of redundancy, can be closely
approximated from underlying measurements and requirements. Finally,
we described the design and implementation of a prototype of this
architecture. Our prototype peer-to-peer storage system, called
TotalRecall, automatically adapts to changes in the underlying host
population, while effectively managing file availability and
efficiently using resources such as bandwidth and storage.
We would like to thank the reviewers for their valuable comments,
Barbara Liskov for being our shepherd, and Marvin McNett for the
system support during the development of TotalRecall. Support for this work
was provided in part by DARPA FTN Contract N66001-01-1-8933 and AFOSR
MURI Contract F49620-02-1-0233.
- 1
-
A. Adya et al.
FARSITE: Federated, Available, and Reliable Storage for an
Incompletely Trusted Environment.
In Proc. of OSDI, 2002.
- 2
-
A. C. Arpaci-Dusseau et al.
Manageable storage via adaptation in WiND.
In IEEE CCGrid, 2001.
- 3
-
R. Bhagwan, S. Savage, and G. M. Voelker.
Replication strategies for highly available peer-to-peer systems.
Technical Report CS2002-0726, UCSD, Nov 2002.
- 4
-
R. Bhagwan, S. Savage, and G. M. Voelker.
Understanding availability.
In Proc. of IPTPS, 2003.
- 5
-
C. Blake and R. Rodrigues.
High availability, scalable storage, dynamic peer networks: Pick two.
In Proc. of HotOS, 2003.
- 6
-
W. J. Bolosky et al.
Feasibility of a serverless distributed file system depoloyed on an
existing set of desktop PCs.
In Proc. of SIGMETRICS, 2000.
- 7
-
B. Callaghan.
NFS Illustrated.
Addison Wesley, 1999.
- 8
-
F. Dabek et al.
Wide-area cooperative storage with CFS.
In Proc. of SOSP, 2001.
- 9
-
J. R. Douceur and R. P. Wattenhofer.
Optimizing file availability in a secure serverless distributed file
system.
In Proc. of SRDS, 2001.
- 10
-
K. Keeton and J. Wilkes.
Automating data dependability.
In Proc. of the ACM SIGOPS European Workshop, 2002.
- 11
-
D. Kostic et al.
Using random subsets to build scalable services.
In Proc. of USITS, 2003.
- 12
-
J. Kubiatowicz et al.
Oceanstore: An architecture for global-scale persistent storage.
In Proc. of ASPLOS, 2000.
- 13
-
P. Maymounkov and D. Mazieres.
Rateless codes and big downloads.
In Proc. of IPTPS, 2003.
- 14
-
D. Mazieres.
A toolkit for user-level file systems.
In Proc. of the USENIX technical conference, 2001.
- 15
-
A. Muthitacharoen et al.
Ivy: a read-write peer-to-peer file system.
In Proc. of OSDI, 2002.
- 16
-
Overnet website, https://www.overnet.com.
- 17
-
D. A. Patterson et al.
Recovery-Oriented Computing (ROC): Motivation, definition,
techniques, and case studies.
Technical Report UCB-CSD-02-1175, UC Berkeley, 2002.
- 18
-
S. Saroiu et al.
An Analysis of Internet Content Delivery Systems.
In Proc. of OSDI, 2002.
- 19
-
S. Saroiu et al.
A measurement study of peer-to-peer file sharing systems.
In Proc. of MMCN, 2002.
- 20
-
S. Savage and J. Wilkes.
AFRAID - a frequently redundant array of independent disks.
In Proc. of the USENIX Technical Conference, 1996.
- 21
-
I. Stoica et al.
Chord: A scalable peer-to-peer lookup service for Internet
applications.
In Proc. of SIGCOMM, 2001.
- 22
-
H. Weatherspoon et al.
Silverback: A global-scale archival system.
Technical Report UCB-CSD-01-1139, UC Berkeley, 2001.
- 23
-
J. Wilkes et al.
The HP AutoRAID hierarchical storage system.
In Proc. of SOSP, 1995.
- 24
-
J. J. Wylie et al.
Survivable information storage systems.
IEEE Computer, 2001.
Total Recall:
System Support for Automated Availability Management
This document was generated using the
LaTeX2HTML translator Version 2002 (1.62)
Copyright © 1993, 1994, 1995, 1996,
Nikos Drakos,
Computer Based Learning Unit, University of Leeds.
Copyright © 1997, 1998, 1999,
Ross Moore,
Mathematics Department, Macquarie University, Sydney.
- ... control.1
- This is not always true, since
processes that impact human error or opportunities for correlated
failures can have an impact. However, we consider these issues
outside the scope of this paper.
- ... period.2
- This is similar, in spirit, to Oceanstore's refresh actions
which are meant to ensure data durability in the face of disk failures [12].
Ranjita Bhagwan
2004-02-13
|
