Rose Liu, Kevin Klues, Sarah Bird, Steven Hofmeyr†, Krste Asanović, John Kubiatowicz
Computer Science Division, University of California at Berkeley
†Lawrence Berkeley National Laboratory
{rfl, klueska, slbird}@eecs.berkeley.edu, shofmeyr@lbl.gov, {krste, kubitron}@eecs.berkeley.edu
We argue for space-time partitioning (STP) in manycore operating systems. STP divides resources such as cores, cache, and network bandwidth amongst interacting software components. Components are given unrestricted access to their resources and may schedule them in an application-specific fashion, which is critical for good parallel application performance. Components communicate via messages, which are strictly controlled to enhance correctness and security. We discuss properties of STP and ways in which hardware can assist STP. We introduce Tessellation, a new operating system built on top of STP, which restructures a traditional operating system as a set of distributed interacting services. In Tessellation, parallel applications can efficiently coexist and interact with one another.
Unlike servers, which exploit parallelism across independent transactions from multiple users, single-user clients will require parallelized applications to benefit from a manycore platform. Future client devices will run a mix of interactive, real-time, and batch applications simultaneously; a user may run multiple web applications, such as Gmail and Facebook, while listening to MP3 music files and video chatting with friends. In addition, battery life is a critical issue for client devices, requiring energy to be a first-class resource that is actively managed by the operating system.
This paper argues that space-time partitioning (STP) is crucial for manycore client operating systems. A spatial partition (or ``partition'' for short) is an isolated unit containing a subset of physical machine resources such as cores, cache, memory, guaranteed fractions of memory or network bandwidth, and energy budget. Space-time partitioning virtualizes spatial partitions by time-multiplexing whole partitions onto available hardware, but at a coarse-enough granularity to allow efficient user-level scheduling within a partition.
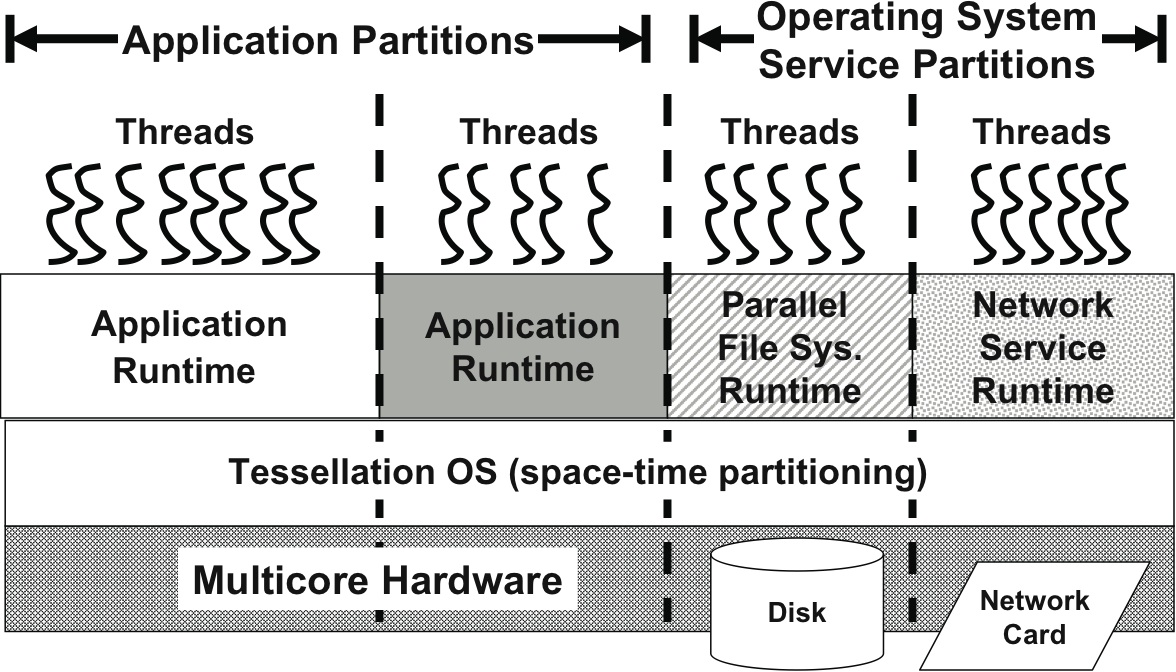
Space-time partitioning leads to a restructuring of systems services as a set of interacting distributed components. We propose a new ``exploded OS'' called Tessellation, structured around space-time partitioning and two-level scheduling between the global and partition runtimes. Tessellation, shown in Figure 1, implements scheduling and resource management at the partition granularity. Applications and OS services run within their own partitions and have exclusive control of the scheduling of resources (e.g. cores, cache, memory) within their partitions. Partitions are lightweight, and can be resized or suspended with similar overheads to a process context switch.
In this section, we make the case for space-time partitioning as a central component of a manycore operating system. One of the key tenets of our approach is that resources given to a partition are either exclusive (such as cores or private caches) or guaranteed via a quality-of-service (QoS) contract (such as a minimum fraction of network or memory bandwidth). During a scheduling quantum, components within a partition are given unrestricted access to their resources via a standardized API that provides a thin abstraction layer, sufficient for portability and ease of programming. This API includes operations to configure the execution context of an application, such as setting up virtual memory translations and assigning threads to specific cores. It also includes mechanisms for constructing secure, restricted channels with other partitions, a topic we will explore in Section 3.
Effectively, components within a partition run as close as possible to the ``bare metal'' hardware with minimal OS interference. They flexibly control their resources by scheduling them in whatever way they choose. Thus, we expect that application runtimes and access to OS services will be provided as libraries (similar to a libOS [8]).
The challenge of exploiting parallelism for client manycore environments is daunting. Successful parallelism strategies, e.g., bulk-synchronous data parallelism or streaming pipeline parallelism, work best when the performance of components is predictable to enable load balancing. If co-scheduled applications or services generate interrupts that cause unpredictable resource availability, performance will suffer. Also, the variety of applications on a client will exhibit different forms of parallelism and incompatible performance goals (e.g., interactive response vs. guaranteed throughput). Consequently, a single monolithic scheduler is unlikely to be sufficient for this diverse environment.
Spatial partitions with exclusive access to resources can provide a stable environment in which application-specific runtimes tailored to different parallel programming models and resource management techniques can execute without interference from incompatible OS scheduling policies. Further, space-time partitioning can provide both functional and performance isolation between simultaneously running applications with different performance goals.
Energy is a crucial resource for the client environment. Spatial partitioning provides an operating system's analog of clock gating (used for power reduction at the hardware level). With proper hardware support, whole partitions could exist in low power states until requests are made of them, at which point they could become enabled only long enough to satisfy a set of incoming requests.
Further, by carefully allocating resources to partitions, the kernel can control the power consumption of each software component. For instance, a portable device encountering a low-energy condition could choose to devote a minimal fraction of available memory and compute bandwidth to a crucial function such as cellphone service, while greatly restricting the resources available to non-crucial functions. Consequently functions such as background email synchronization would slow down or stop while continuing to support reception of calls.
For instance, an IP network component could receive sufficient CPU and memory resources to guarantee its ability to handle external network traffic at line speed while performing intrusion detection, packet classification, and demultiplexing. Resources allocated to this partition are dedicated, ensuring that it can achieve its performance goals.
Another example is a file system service that receives a guaranteed resource allocation to provide service-level QoS guarantees to other partitions. The file system expresses these service-level QoS guarantees to other partitions in terms of the number of incoming requests that can be satisfied per unit time. This request bandwidth can be enforced by the controlled communication mechanisms, exported by an OS kernel, to limit message traffic across partition boundaries.
Isolation of resources and inter-partition communication leads to enhanced security and correctness. Partitions are vulnerable at their boundaries. By enforcing predetermined communication patterns, the kernel can prevent many classes of attack and incorrect behaviors. Even if dynamic inter-partition communication patterns are desired, the partitioning mechanism can require each new connection to be vetted and approved by the kernel before communication is possible.
Further, the isolation properties of a partition could be exploited for fast restart of software components. Fast restart would be achieved by making sure that each partition has persistent state that is undo-able through logging or transaction support. Since partitions are isolated from one another, it is conceivable that a faulty service partition could be rapidly rebooted and restored to a functioning state without revoking its resources or disturbing other partitions.
An efficient inter-partition communication mechanism would enable the splitting of applications into multiple sub-application partitions. For instance, a parallel web browser [11] might utilize auxiliary partitions to hold untrusted plugins, thereby gaining additional security. Or, an application such as a virtual-reality game or music synthesis program might isolate realtime components from background model-building components via partitioning. Separating such components would simplify scheduling since each component can be configured/scheduled independently. Realtime sub-partitions can be given higher priority with stronger resource allocation guarantees than best-effort sub-partitions. A kernel API would provide support for application runtimes to configure sub-partition resource allocation, priority, and scheduling.
For heterogeneous architectures, partitions can encompass components with different computational capacity; for instance, some partitions may consist of ``fat'' cores while others include cores best adapted for SIMD computation. In this case, application partitioning can reflect the computational needs of an application.
The simplest view of a partition is an isolated set of computational resources, but STP becomes particularly interesting when we consider partitions as interacting components within a larger system. In this section, we elaborate on three important mechanisms for selectively relaxing partition-level isolation: inter-partition communication, cross-partition quality-of-service guarantees, and partition virtualization.
Partitions provide a natural framework for encapsulating major components of applications and the operating system. However, splitting an application across multiple partitions requires that these partitions be able to communicate with one another. If poorly designed, cross-partition communication could become a weak point in the security or QoS guarantees provided by the system as a whole. We believe that a misbehaving or compromised partition should not affect the QoS or correctness of other partitions, except in a very restricted fashion along previously-established inter-partition communication channels.
Our current model of inter-partition communication is via message passing. Message passing makes it easier to reason about the security of the system because messages are read-only and explicitly relinquished by the sender at the time of transmission. Message channels (that may be encrypted) must be authorized by a trusted code base (e.g., as with partition tagging in HiStar [18]) before they can be used. The efficient implementation of message channels including hardware support is an ongoing topic of research, as is the channel interface; we may eventually relax our inter-partition communication model to include restricted forms of shared memory.
Each unidirectional message channel consists of a source endpoint and a destination endpoint. Since the destination partition of a message may be descheduled at the time that a message is sent, each destination endpoint must consist of resources (e.g., a queue in memory) that persist at all times. There may be a variety of semantics for what happens upon a message enqueue depending on the scheduling policy for destination endpoints. For instance, if the partition is not currently running, the kernel scheduler could schedule the destination partition at some future (or the next) time quantum, or immediately schedule the destination partition. To notify the destination partition of the message, the kernel could either generate an interrupt to the destination partition (once it is running), or the destination partition could periodically poll for new messages. We are experimenting with batching most application and OS events in hopes of eliminating many of the traditional uses for interrupts.
|
Partitions only communicate with one another or the outside world through messaging. Consequently, monitoring and restricting the flow of messages provides an important mechanism for enforcing QoS.
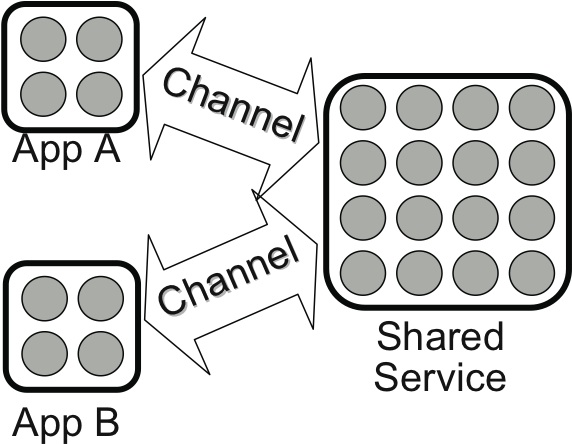
For instance, suppose that applications A and B are granted equal quantities of some global resource (e.g., energy, network bandwidth, or execution time). In the presence of a shared service (see Figure 2), two things must be accomplished to enforce QoS: First, the shared service must be profiled or otherwise analyzed to ascertain a relationship between incoming request rate and resource usage. Second, requests from applications A and B must be monitored and potentially suppressed at the source to prevent either application from denying the other its fair share of the shared service. Such source suppression is an analog of mechanisms that have been proposed to guarantee QoS for network bandwidth[12].
Partitions can be virtualized and multiplexed on physical hardware by a global partition manager. Partition resources must be gang scheduled to provide application runtimes with full knowledge and control over their resources to enable them to implement optimized scheduling and resource allocation internally. To allow application-level scheduling, the time quantum at which partitions are run should be much longer than that for traditional OS processes. Some partitions with strict resource demands, e.g., highly utilized services or hard realtime applications, may be pinned to cores or multiplexed at a predictable rate. Other partitions may only be scheduled in response to messages sent to that partition. For example, rarely used services could be ready to run but only scheduled when an application makes a request.
When starting, an application that requires resource guarantees must express its resource and QoS requirements to a global partition manager in charge of actually allocating out those resources; such requirements may be discovered through profiling, analysis, or online tuning. If the demands can be met without violating other applications' guarantees, then the new application can start (it is admitted). However, if admitting the application would cause oversubscription--resulting in failure to meet all of the current QoS contracts--then the application must be denied. The user will be informed that the new application can not be admitted without changing the current set of running applications.
|
In this section, we discuss hardware mechanisms (existing and proposed) to aid in partitioning and reduce the overhead of time-multiplexing a partition. The Partition Mechanism Layer (next section) combines these mechanisms to provide a uniform partitioning API.
Cores (CPUs) are controlled by restricting the ability of applications to run threads on the cores. Physical memory is partitioned using conventional mechanisms such as page tables and TLBs.
We need hardware support to partition shared resources, e.g., caches and network/memory bandwidth, in order to provide performance isolation. Performance isolation enables the operating system to run arbitrary applications simultaneously (spatially distributed), while providing a simple performance model to each application. Shared caches should be partitionable flexibly and dynamically for efficient utilization. Previous works suggest some possible mechanisms to partition caches such as [17] or [9]. Similarly, hardware support is needed to partition interconnect bandwidth. Lee et. al. describe one possible solution for providing QoS in on-chip networks [12]. Such mechanisms can be extended to provide QoS for off-chip memory usage.
Ideally, we also envision having hardware support to secure message channels between partitions. Mechanisms such as message tagging would allow partitions to initiate communication without the intervention of privileged software. Support to track and regulate the volume of inter-partition communication would enable efficient implementations of service-level QoS.
So far, we have described mechanisms for enforcing spatial partitions. Tessellation also uses hardware performance counters to monitor application performance, resource usage, and energy consumption. Performance information can be collected for all resources within a partition to determine the runtime behavior of an application during its different phases. This information can then be used to adjust resource allocations for better utilization. Ideally, future hardware would support gathering and reporting statistics at the partition granularity.
In our current experimental platform, cores are partitioned in software by controlling the ability of application runtimes to place a thread onto a particular core; the kernel proceeds only if the core belongs to the requesting partition. Lacking hardware support for messaging, message channels are constructed by mapping message FIFOs in protected shared memory between partitions.
To determine which resources and how much of those resources should be allocated to each partition, the Partition Manager needs an abstract understanding of the machine topology; the Partition Mechanisms Layer should provide this abstract specification in a machine-independent way. Fortunately, future single-chip manycores will have lower communication latencies than existing symmetric multiprocessors (SMPs) which simplifies the tradeoff of either minimizing the latency of private data access per thread or minimizing communication latency between threads. Consequently, to first order, the Partition Manager will only need to determine how much of a resource to allocate rather than which resource to allocate.
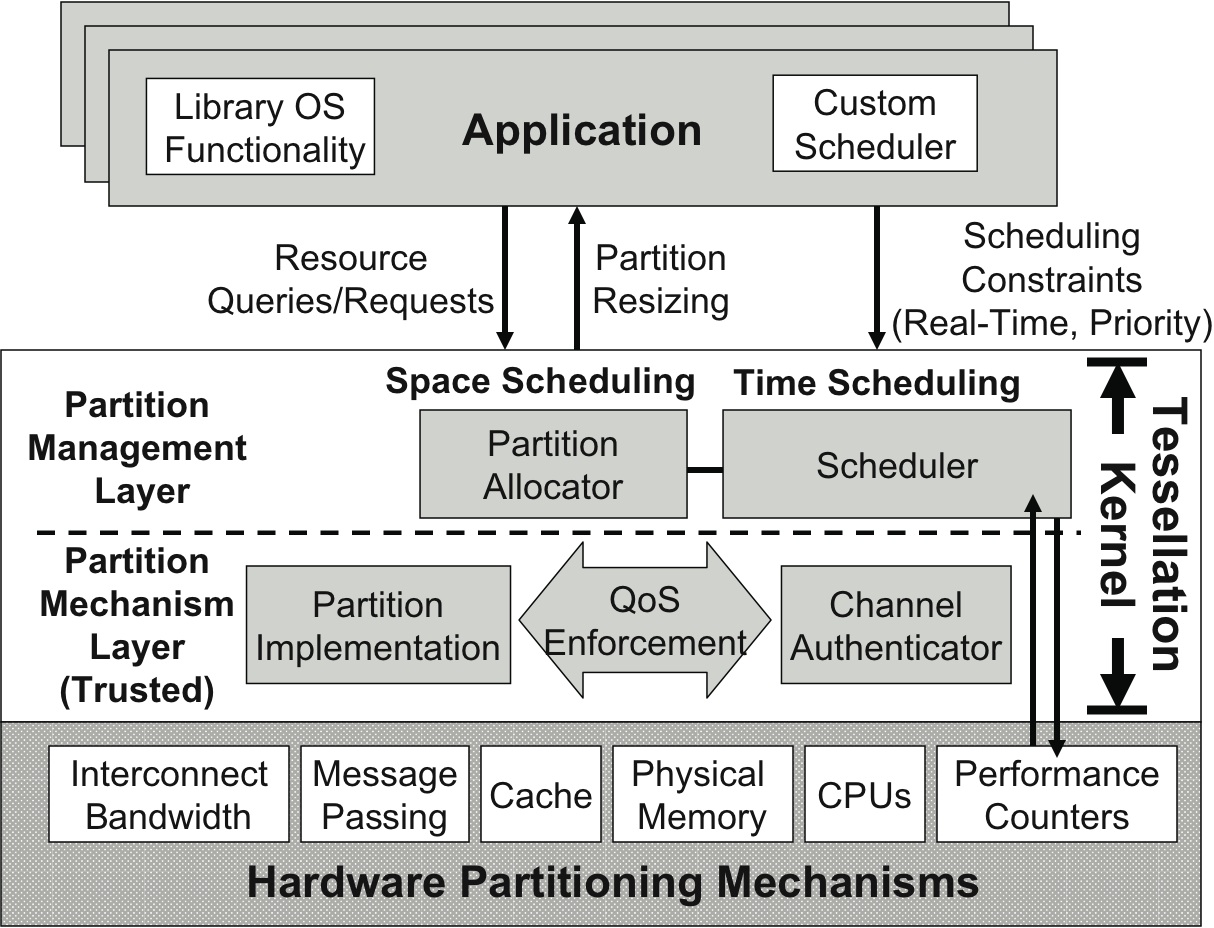
Since the optimal number of partition resources required by an application can vary over time, the Partition Manager should dynamically adjust allocations to optimize system efficiency. The partition resizing API implemented by application runtimes (shown in Figure 3 and described further in Section 4.4) permits the Partition Manager to resize running application partitions. Applications that do not implement this interface prevent the Partition Manager from dynamically changing the size of a spatial partition to improve performance or reduce energy consumption (although such partitions can still be time-multiplexed).
The Partition Manager uses hardware performance counters, as described in Section 4.1, to determine the best resource allocation for each partition. The Partition Manager uses these counters to dynamically build a model correlating resource allocation with estimated performance on a partition basis; This is in the spirit of Quereshi's work [14], however, our goal is to speed up an entire parallel application, not just one of its threads (which may not improve application performance). We are currently exploring policies for resource allocation trading off system performance with energy consumption.
The Partition Manager time-multiplexes partitions onto the machine. Partitions whose configurations fit on the machine can be scheduled simultaneously. The performance isolation provided by partitioning eliminates the need to worry about how the applications may interfere with each other. Unallocated resources can be left in a low-power state, or used to run an application that can make reasonable progress with only those resources.
Tessellation exports three additional interfaces. One allows applications to dynamically request and return resources to the Partition Manager. Another allows applications to specify scheduling constraints such as real time deadlines or priorities. A third allows applications to initiate secure channels with other partitions.
The Tessellation effort includes work on user-level libraries for exporting traditional I/O and system call interfaces to applications running in partitions. We provide a version of NewLibC [1] that implements system services by sending messages to service partitions; initially, these service partitions are running complete copies of operating systems such as FreeBSD. We are also collaborating closely with efforts to provide frameworks for constructing custom user-level runtime systems, such as Lithe [13].
Unlike LPAR [6] and DLPAR [10], hardware partitioning within Tessellation is lightweight and flexible; the overhead of resizing or multiplexing partitions is of the order of a process context switch. Space-time partitioning complements threading runtimes such as McRT [15]. The sequestered mode of McRT, which runs directly on bare-metal resources and acts as a light weight threading system, is exactly the type of environment that Tessellation's spatial partitioning can provide.
Existing operating systems (e.g. Linux, BSD, or Windows) operate at the granularity of individual CPUs, and therefore use the thread abstraction to make resource allocation and scheduling decisions. We claim that spatial partitions provide a more natural abstraction for supporting multiple parallel applications within a client manycore device. Further, spatial partitions act as a natural abstraction for implementing resource allocation and accounting frameworks such as resource containers [4] and energy-aware scheduling policies such as [19].
Researchers have started to explore the space of manycore operating systems. Corey OS [7] is a manycore OS that achieves scaling by giving programmers control over the sharing of kernel data structures. We believe that Tessellation's distributed OS services approach combined with space-time partitioning helps with scaling. Barrelfish OS [16] is geared towards manycore platforms and shares our high-level goal of structuring the OS as a distributed system.
We are currently implementing Tessellation OS with resource partitioning and secure channels; several components exist already. Initially, device drivers and I/O will be provided by FreeBSD running in a separate partition. Soon thereafter, we will build partition-aware file systems and TCP/IP interfaces. We are investigating efficient dynamic resource allocation policies, QoS mechanisms, and portable representations of resources and communication topology. We will soon have several secure channel designs, composable user-level scheduling, and energy management. STP allows a restructuring of traditional operating systems--an exciting prospect that we look forward to reporting on at a future date.