|
USENIX '04 Paper
[USENIX '04 Technical Program]
A Transport Layer Approach for Improving End-to-End Performance and Robustness Using Redundant Paths
Ming Zhang, Junwen Lai
Princeton University
{mzhang, lai}@cs.princeton.edu
- Arvind Krishnamurthy
Yale University
arvind@cs.yale.edu
- Larry Peterson, Randolph Wang
Princeton University
{llp, rywang}@cs.princeton.edu
Recent work on Internet measurement and overlay networks has shown
that redundant paths are common between pairs of hosts and that one
can often achieve better end-to-end performance by adaptively
choosing an alternate path [8,27]. In this paper,
we propose an end-to-end transport layer protocol, mTCP, which can
aggregate the available bandwidth of those redundant paths in parallel.
By striping one flow's packets across multiple paths, mTCP can
not only obtain higher end-to-end throughput but also be
more robust under path failures. When some paths fail, mTCP can continue
sending packets on other paths, and the recovery process normally
takes only a few seconds. Because mTCP could obtain an unfair share of
bandwidth under shared congestion, we integrate a shared congestion
detection mechanism into our system. It allows us to dynamically
detect and suppress paths with shared congestion so as to alleviate
the aggressiveness problem. mTCP can also passively monitor the performance of
several paths in parallel and discover better paths than the path
provided by the underlying routing infrastructure.
We also propose a heuristic to find disjoint paths between pairs of nodes
using traceroute. We have implemented our system on top of overlay networks
and evaluated it in both PlanetLab and Emulab.
Introduction
Recent work on Internet measurement and overlay networks has shown
that redundant paths are common between pairs of hosts [27].
One can often achieve better end-to-end performance by adaptively
choosing an alternate path other than the direct Internet path
[8]. At the same time, stub networks are increasingly
resorting to multihoming to improve the reliability of their network connectivity
[5]. The reliability is usually achieved by having
sufficiently disjoint paths to the destinations of interest. Moreover,
with the rapid growth of wireless coverage, mobile users can often have access
to multiple communication channels simultaneously [17,21].
All of the above means redundant paths are quite common between pairs of
hosts.
Our goal is to design an end-to-end transport layer protocol (mTCP) which
can not only aggregate the bandwidth of several paths concurrently
but also enhance the robustness under path failures by taking advantage
of redundant paths. Compared with the conventional single-path TCP
flows, mTCP stripes a flow's packets across several paths.
It can be viewed as a group of single-path subflows, with each subflow
going through a separate path.
A number of challenges arise when one
attempts to develop a transport layer protocol that utilizes
multiple paths simultaneously.
First, the traditional congestion control mechanism in TCP needs to be
modified in order to fully exploit the aggregate bandwidth of the
multiple paths used by mTCP. If one were to use the traditional
congestion control mechanism on the whole flow (wherein the congestion
window for the entire flow is halved for every packet loss), the mTCP
connection would remain under-utilized in the following scenario.
Assume that one of the sub-flows is using a heavily congested path.
Severe packet losses on that path will result in repeated shrinkage of
the window, resulting in sub-optimal use of the other sub-flows that
remain uncongested. mTCP therefore needs to perform congestion
control on each subflow independently so as to minimize the negative
influence of congested subflows.
Second, paths may fail during data transmission. mTCP should not
stall as long as there exists one operational path. It should be able
to quickly detect failed paths and continue sending or retransmitting
packets on live paths.
Third, when subflows of a mTCP flow share congested links, the whole
flow can obtain an unfairly larger share of bandwidth than
other single-path TCP flows since
each subflow behaves as a single-path TCP flow.
To alleviate this aggressiveness problem, we integrate a shared
congestion detection mechanism into our system so as to identify
and suppress subflows that traverse the same set of congested links.
Finally, there might exist many alternate paths between a pair of
source and destination nodes. We want to select a small number of
candidate paths for mTCP flows since it is impractical to use all
the paths simultaneously. We use a heuristic to identify and
select disjoint paths using traceroute.
This can minimize the possibility of shared congestion and
concurrent path failures.
We do note that mTCP provides performance benefits only when
there are multiple paths that do not share congested
physical links.
Although in today's Internet, many congested or bottleneck links lie at
the edge of the network and limit the performance benefits
of mTCP, this is likely to change with the growing popularity of
high speed Internet access. In [6], Akella,
Seshan and Shaikh measured a diverse set of paths traversing Tier-1,
Tier-2, Tier-3, and Tier-4 ISPs. They discovered that about 50% of the paths
have bottleneck links that are located within ISPs or between
neighboring ISPs.
The available capacity of those bottleneck links are less than 50Mbps,
well below the 100Mbps Ethernet speed that could be attained within
local area networks. In such situations, mTCP is likely to find
multiple paths that are not constrained by the bandwidths attainable
at the edge of the network. Other scenarios where mTCP could find an
useful set of disjoint paths to transmit data include multi-homed
clients [5].
We also note that our focus is on improving the performance and robustness for
large data transfers. Although most flows on the Internet are small,
most of the traffic on the Internet is contributed by a small
percentage of big flows [34,13]. Therefore,
improving the performance of such big flows is important.
Additionally, while small flows might not necessarily benefit from
throughput aggregation, they might still benefit from mTCP's robustness
that would enable them to quickly detect and recover from path failures.
To the best of our knowledge, we are the first to implement and
evaluate a transport layer protocol that can utilize
redundant paths concurrently in real systems. We try to provide a
comprehensive design that addresses the inter-related issues of
sub-flow congestion control, unfair use of congested links, path selection,
and recovery from path failures. We believe that it is beneficial to
tackle all of these issues in a single tightly-coupled system.
For instance, suboptimal decisions from the path selection mechanism
could be corrected by a mechanism that detects the use of shared
congested links. Alternately, shared congestions could be detected
easily by monitoring TCP events (such as fast retransmits)
without requiring separate probe messages. Furthermore, the
system could quickly recover from failures by maintaining and
transmitting along multiple paths. Finally, a mTCP flow can passively
monitor the performance of several paths in parallel and estimate
their available bandwidths. The bandwidth estimates are typically
more accurate than the estimates provided by the underlying overlay
routing mechanisms. This in turn can help select better paths.
The rest of the paper is organized as follows: Section 2 will
describe related work. Section 3
will discuss the specific design problems of mTCP in detail.
Section 4 briefly describes the implementation of
our system. Section 5 demonstrates the results from
experiments conducted on PlanetLab [25] and Emulab [2].
Finally, Section 6 concludes.
Related Work
The general idea of using multiple paths in a network to obtain better
performance has been explored in a number of different research
efforts. We briefly discuss how our work relates to previous
research in this area.
One area of related work is the use of striping [32] or
inverse-multiplexing in link-layer protocols to enhance the
throughput by aggregating the bandwidth of different links. Adiseshu
et al [4], Duncanson et al [12]
and Snoeren [29] provide
link-striping algorithms that address the issues of load-balancing
over multiple paths and preserving in-order delivery of packets to the
receiver. These efforts propose transparent use of link-level
striping without requiring any changes to the upper layers of the
protocol stack.
Another area of related work is the use of multiple paths by transport
protocols to enhance reliability [10,24,20,9].
Banerjea [10] proposed the use of redundant paths in his
dispersity routing scheme to improve reliable packet delivery
for real-time applications. Nguyen and
Zakhor [24] also propose the use of multiple paths to
reduce packet losses for delay-sensitive applications. They employ
UDP streams to route data whose redundancy is enhanced through forward
error correction techniques.
The most directly relevant related work is the use of multiple paths
for improving the throughput or robustness of end-to-end connections.
Several application-layer approaches have been proposed to improve
throughput by opening multiple TCP sockets concurrently
[7,14,19,28], but the multiple TCP
connections utilize the same physical path. These approaches obtain
an unfair share of the throughput of congested links and seem to
primarily benefit from increased window sizes over long-latency
connections. SCTP [31] is a reliable transport protocol which
supports multiple streams across different paths. However, it does not
provide strict ordering across all the streams, and it cannot utilize
the aggregate bandwidth on multiple paths as we do. The systems that are
closest to what is described in this paper is R-MTP [21] and pTCP [16].
R-MTP provides bandwidth aggregation by striping packets across multiple paths based on
bandwidth estimation. It estimates the available bandwidth by periodically probing
the paths. As a result, its performance greatly relies on the accuracy of
the estimation and the probing rate. It could suffer from bandwidth fluctuation
as shown in [16]. pTCP uses multiple paths to transmit TCP
streams and describes mechanisms for striping packets across the
different paths. They however assume the existence of a separate
mechanism that identifies what paths to use for their pTCP
connections, and they also do not address the issues of recovering from
path failures or obtaining an unfair share of the throughput of
congested links if the paths are not disjoint. Their study is also
limited to simulations using ns[3].
Design
The design of our system seeks to satisfy three goals. First, given several
paths, mTCP should be able to make full use of the
available bandwidth on those paths.
Second, when mTCP uses paths with shared congested links, it
should be able to alleviate the aggressiveness problem
by suppressing some of the paths. Third, when some paths fail,
mTCP should quickly detect and recover from the failures.
Transport Layer Protocol
mTCP provides the same semantics to applications as TCP. It preserves
properties such as reliability and congestion control.
Because mTCP uses several paths in parallel, it has to decide
how to stripe packets across the paths and how to manage congestion control for
each subflow.
In mTCP, all subflows share the same send/receive buffer.
Packets are assigned sequence numbers in the same way as in TCP. But it
does congestion control independently on each subflow.
Each subflow maintains a congestion window as in TCP. The congestion window
changes independently as the subflow adapts to the network state. When
there are no packet losses in the subflow, it linearly increases.
Upon detecting packet losses, it is halved. When timeout occurs, it
is reset to one and the subflow enters slow-start.
mTCP strives to keep all subflows independent from each other.
Suppose we had used only one global congestion window for the entire
flow that limits the total amount of outstanding data across all subflows.
The packet losses on any one of the paths will cause the global
congestion window to be halved.
If one subflow happens to traverse a heavily congested path,
it can keep the global congestion window small, and the other subflows will
not be able to utilize the available bandwidth on other good paths. In
fact, this can sometimes decrease the throughput of the whole flow
to be even lower than that of a single-path TCP flow on a single good path.
This phenomenon was also studied in [16].
TCP uses (sndnxt - snduna) to estimate the number of outstanding
packets in the network. (For convenience, we assume packets
are of the same size and use packets instead of bytes for discussion.)
Here sndnxt is the next packet to be sent and snduna is
the next packet for which an ACK is expected.
The difference should be no more than the congestion window
( cwnd). In mTCP, since packets are striped across different
paths, we need to keep track of how many outstanding packets are in each path
to ensure that the number does not exceed the cwnd of that path.
Our mTCP is based on TCP SACK [22], which is an extension of
TCP Reno. In Reno, the receiver only reports the greatest packet number
that arrives in-order. But in mTCP, different paths have different latencies.
Many packets can arrive at the receiver out-of-order. We want to accurately
know which packets have been received, irrespective of whether
or not they arrived in-order.
This helps us to compute the number of outstanding packets on
each path, which is essential for performing congestion control
separately on each subflow.
In SACK, the sender maintains a scoreboard data structure to keep
track of which packets have or have not been received.
An acknowledgement (ACK) packet may carry several SACK blocks, where
each SACK block reports a non-contiguous set of packets that has been
received. The first SACK block reports the most recently received packet
and additional SACK blocks repeat the most recently reported SACK blocks.
The SACK blocks allows the sender to identify what packets have been
newly received irrespective of whether or not the data packets arrive
in-order.
We augment the scoreboard data structure so that it records the path
over which each packet is transmitted or retransmitted. For
each  , we maintain a , we maintain a  to represent the number of
outstanding packets on . is incremented by 1
when the sender either sends or retransmits a packet over . It
is decremented when an incoming ACK indicates that a packet
previously sent on has been received.
New packets are allowed to be
sent over only when to represent the number of
outstanding packets on . is incremented by 1
when the sender either sends or retransmits a packet over . It
is decremented when an incoming ACK indicates that a packet
previously sent on has been received.
New packets are allowed to be
sent over only when
 .
Retransmitted packets require
special handling. Suppose the
original packet is sent over and the retransmitted packet is
sent over .
Retransmitted packets require
special handling. Suppose the
original packet is sent over and the retransmitted packet is
sent over  . When the retransmitted packet is ACKed, the sender
decrements both and . When the retransmitted packet is ACKed, the sender
decrements both and  by 1,
because it represents two packets having left
the network: the original one on , which is assumed to be
lost, and the retransmitted one on , which has been
received. We want to emphasize that the original and retransmitted packets
do not have to be sent over the same path. We will discuss this in
more detail in Section 3.1.4.
Finally, if times-out, will be reset to 0. by 1,
because it represents two packets having left
the network: the original one on , which is assumed to be
lost, and the retransmitted one on , which has been
received. We want to emphasize that the original and retransmitted packets
do not have to be sent over the same path. We will discuss this in
more detail in Section 3.1.4.
Finally, if times-out, will be reset to 0.
Fast Retransmit
Since mTCP sends packets along several paths with
different latencies, packets can arrive at the receiver out-of-order.
This can cause duplicate acknowledgement packets ( dupack), which
will trigger fast retransmits.
These fast retransmits are caused by packet reorderings and not by packet losses,
therefore we want to avoid them.Although packets sent through different paths can be received
out-of-order, packets within each subflow will still mostly arrive
in-order. Each therefore maintains the following
path-specific state:  , the number of dupack along
that path and , the number of dupack along
that path and  , the next packet requiring an ACK.
If an incoming ACK indicates the receipt of a packet sent
through and if that packet is
, this packet is considered to be in-order within that subflow.
If that packet is greater than , is incremented by 1.
When reachs , the next packet requiring an ACK.
If an incoming ACK indicates the receipt of a packet sent
through and if that packet is
, this packet is considered to be in-order within that subflow.
If that packet is greater than , is incremented by 1.
When reachs  , will enter fast
retransmit and fast recovery. , will enter fast
retransmit and fast recovery.
Sending Packets
mTCP separates the decisions of when to send a packet,
which packet to send, and which path to use to send the packet. The sender is
allowed to send a new packet when there exists at least one
satisfying
.
The packet to send is usually determined
by  , which represents the next packet to send as in
TCP. But if there is a with packets to retransmit,
i.e. is in fast recovery, the sender has to retransmit those
packets inferred to be lost before sending
any new data packets. Once again the scoreboard is consulted to
determine whether there are any such packets that need to be
retransmitted.
Otherwise, a new data packet referenced by will be sent. , which represents the next packet to send as in
TCP. But if there is a with packets to retransmit,
i.e. is in fast recovery, the sender has to retransmit those
packets inferred to be lost before sending
any new data packets. Once again the scoreboard is consulted to
determine whether there are any such packets that need to be
retransmitted.
Otherwise, a new data packet referenced by will be sent.
Next, the sender needs to decide the path over which the packet
will be sent. There may be several candidate paths. We associate a
 with each .
We choose the path with the minimum score. This form of
proportional scheduling results in a fair striping of
packets and avoids sending a burst of packets
on one path. with each .
We choose the path with the minimum score. This form of
proportional scheduling results in a fair striping of
packets and avoids sending a burst of packets
on one path.
Because mTCP separates the decisions about when to send,
which to send and which path to use for sending, it has more flexibility in
striping packets. By postponing
the decision about which path to use until just before sending
out the packet, it can quickly adapt to dynamic variations in path
characteristics.
If a path encounters congestion or fails, its  will be reduced. The mTCP flow does not have to wait for
the re-opening of the on that path to retransmit
the outstanding packets. It can retransmit those outstanding
packets on other paths.
We want to emphasize that, unlike the re-striping scheme used in
pTCP [16], our scheme will not retransmit packets that have
already been received, because we can precisely infer missing packets
from the scoreboard data structure. In pTCP, such re-striping overhead
becomes more significant when fast retransmit occurs more frequently.
will be reduced. The mTCP flow does not have to wait for
the re-opening of the on that path to retransmit
the outstanding packets. It can retransmit those outstanding
packets on other paths.
We want to emphasize that, unlike the re-striping scheme used in
pTCP [16], our scheme will not retransmit packets that have
already been received, because we can precisely infer missing packets
from the scoreboard data structure. In pTCP, such re-striping overhead
becomes more significant when fast retransmit occurs more frequently.
In our design, despite the fact that data packets are striped over several paths,
all ACKs return over the same path. There are two advantages of using one path
for ACKs. First, it preserves the ACK ordering for all the subflows.
If ACKs return from different paths, this may introduce ACK reorderings
even within one subflow, which will increase the burstiness of the sender.
Second, striping ACKs across different paths makes our system
more complicated. Receiver has to maintain additional states about which
ACKs going through which paths. We try to keep the receiver side as
simple as possible, following the design principle of TCP.
The advantage of using multiple reverse path is that it is more robust
to congestion or failure. Note that ACKs normally are small and are less
likely to cause congestion as data packets do. In addition to this, we
try to avoid congestion on the reverse path by selecting the best path
among all the candidate paths with the help of underlying overlay router.
This will be discussed in Section 3.3. To recover
from path failures using single reverse path is a little more
complicated. But if we stripe ACKs across multiple paths, we have to
constantly suffer from ACK ordering problem although it is more robust
to failures. Since failures generally will not occur very often, by using
single reverse path, we sacrifice a little performance during failure
recovery but obtain better performance in most time during data
transmission. In Section 3.5.2 of our paper, we show
that we can still quickly recover from path failures even if we use single
reverse path.
We could have avoided much complexity by opening separate TCP sockets
for each path and then striping packets at the application
layer [28]. But this approach has some limitations
which can prevent us from efficiently aggregating the bandwidth
over multiple paths,
To fully utilize the bandwidth on multiple paths, we must ensure
the amount of data striped over a paths is proportional to the
bandwidth of that path. This can be very difficult to achieve in current Internet where
the conditions of paths are quite dynamic.
Modifying TCP directly gives us more flexibility on striping data
streams across multiple paths. We can decide, for each packet, an
appropriate path the packet should traverse and this decision is made
just before the packet is sent out. This is especially useful for
migrating the outstanding packets on bad paths to good paths when
the quality of paths changes dynamically or during path failures.
Striping at the application layer cannot adapt to changes in path
quality responsively.
The pTCP study [16] has shown in simulations that such scheme
cannot fully utilize multiple paths when the number of paths exceeds two.
Shared Congestion Detection
When mTCP uses paths that are not completely disjoint
and if some of the shared physical links are congested,
the whole mTCP flow will obtain more bandwidth than other single-path
TCP flows along those congested links, since each of the subflows behaves as
a TCP flow.
mTCP tries to alleviate the aggressiveness problem by detecting
shared congestion among its subflows and suppressing some of them.
Previous work [26,15,18,33] on shared congestion
detection is based on the observation that if two single-path flows share
congestion, packets from two flows traversing a congested link at
about the same time are likely to be either dropped or delayed.
Rubenstein et al. [26] actively inject
probing packets through the two paths to compute the correlation of
packet losses or packet delays and thereby identify shared congestions.
Certainly, we can directly use one of the above approaches in our system
since shared congestion detection is quite independent from other parts of
the system.
We however take a simpler approach based on the following observations.
mTCP transmits a steady stream of packets through
different paths. In this setting, there is no need to send probing
packets. Instead, one can passively monitor the subflows by
studying the behavior of the data packets.Furthermore, since individual packet drops will result
in fast retransmits along the corresponding subflows, the sender can
detect shared congestions by examining the correlations between the
fast retransmit times of the subflows. Since data packets also double
as probe packets and since there are a large number of data packets
transmitted through a subflow, our passive monitoring strategy
requires little overhead and generates a continuous stream of
information resulting in fast detection of shared congestion.
Let us focus on detecting shared congestion between a pair of subflows.
For more than two subflows, we need to detect shared congestion between
every pair of them.
For abbreviation, if two subflows or paths share congestion,
we say that they are correlated, otherwise, they are independent.
We first assume that two paths have the same
latency so that we do not have to worry about the time synchronization problem
between them. Later, we will extend our algorithm so that it can
deal with paths with different latencies.
Each time that a subflow enters fast retransmit, the
sender records a timestamp in the subflow's list of fast retransmit
events. After some time, we have two lists of timestamps,  and and  ,
from two flows: ,
from two flows:
 and and
 .
Each timestamp represents a fast retransmit event. Then we try to
match a timestamp .
Each timestamp represents a fast retransmit event. Then we try to
match a timestamp  in with in with  in . If in . If
 , we call , we call  a match.
Intuitively, a match means the two subflows enter fast
retransmit around the same time. This also means packets from the two flows are
dropped at about the same time, so it is likely they share
the same congested link. We define a match.
Intuitively, a match means the two subflows enter fast
retransmit around the same time. This also means packets from the two flows are
dropped at about the same time, so it is likely they share
the same congested link. We define  to be
the maximum number of pairs , such that
matches . Please note that each cannot be matched with
multiple . Finally, two subflows are considered to be correlated if: to be
the maximum number of pairs , such that
matches . Please note that each cannot be matched with
multiple . Finally, two subflows are considered to be correlated if:
 is intended to identify what fraction of fast retransmits
occur at about the same time in the two subflows.
Since some of the fast retransmits are due to congestion on
disjoint links, reflects the level of shared congestion.
We consider two subflows to be correlated when is
greater than some threshold is intended to identify what fraction of fast retransmits
occur at about the same time in the two subflows.
Since some of the fast retransmits are due to congestion on
disjoint links, reflects the level of shared congestion.
We consider two subflows to be correlated when is
greater than some threshold  . .
Our method uses fast retransmits instead of individual packet losses to
infer shared congestion. This is because when a data flow encounters
congestion, there normally will be a burst of packet losses. All these
losses are caused by one congestion period at some link. Therefore,
the congestion period corresponds more directly to a fast retransmit
other than any individual packet loss.
We would like to declare to be a match only when packets
from two subflows are dropped at one link during the same congestion
period. So  cannot be too small, otherwise even if
and occur in the same congestion period, the system will not detect
the match. On the other hand, cannot be too large,
otherwise the system would consider to be a match even
when they are not due to shared congestion. Although the shared congestion
detection may not work well under active queue management schemes,
most routers on today's Internet use drop-tail queues, which lead to
periods of bursty losses during congestion. In [35], the
authors find that 95% of the duration of bursty losses are less
than 220ms. So should be on that time scale. We will
study how to choose and in more detail in
Section 5.4. cannot be too small, otherwise even if
and occur in the same congestion period, the system will not detect
the match. On the other hand, cannot be too large,
otherwise the system would consider to be a match even
when they are not due to shared congestion. Although the shared congestion
detection may not work well under active queue management schemes,
most routers on today's Internet use drop-tail queues, which lead to
periods of bursty losses during congestion. In [35], the
authors find that 95% of the duration of bursty losses are less
than 220ms. So should be on that time scale. We will
study how to choose and in more detail in
Section 5.4.
We need to emphasize that our goal is to suppress correlated subflows
in order to alleviate the aggressiveness problem. We need to detect shared
congestion as quickly as possible. Other efforts focus more on the accuracy
of shared congestion detection, and they may take several hundred seconds to
reach a decision. This does not work well for our purpose, because
a mTCP flow could have ended before shared congestion is detected.
Our algorithm works as follows. After some number of fast retransmit
events have been observed,
we will check for shared congestion between the two subflows. If there is
shared congestion, we can suppress one of them.
Otherwise, we will wait until the
occurrence of the next
fast retransmit to check for shared congestion again. The question we
now address is determining the number of fast retransmit events that
we need to observe before we start checking for shared congestion.
We use a heuristic to estimate the probability of two fast
retransmit events from two independent flows accidentally occurring
within a small period of time.
Suppose the fast retransmit events of two subflows,
S and T, are completely independent when two subflows are independent,
we compute the average interval of two consecutive fast retransmit
events in S:
 , where , where  is the current
time when shared congestion detection is invoked. is the current
time when shared congestion detection is invoked.
 is computed in a similar way. Then we define is computed in a similar way. Then we define
 .
Suppose .
Suppose  , we have , we have
 , and , and
 . For each , if
there exists a match , must be
in the . For each , if
there exists a match , must be
in the
 . Because we assume
and are independent events, the probability that matches
some is roughly . Because we assume
and are independent events, the probability that matches
some is roughly  . So the total expected number of matches is roughly . So the total expected number of matches is roughly
 . Because . Because  , we will misinterpret
S and T to share congestion if , we will misinterpret
S and T to share congestion if
 . According
to Chernoff bound [11]: . According
to Chernoff bound [11]:
where
 .
So we need to wait for .
So we need to wait for
 fast
retransmit events to ensure that the probability of a false positive
is less than fast
retransmit events to ensure that the probability of a false positive
is less than  . We will see in Section 5.4 the convergence time is
mostly within 15 seconds in our Emulab and PlanetLab experiments.
We want to emphasize that even if false positive does
occur, it will only degrade a mTCP flow into a single-path flow. . We will see in Section 5.4 the convergence time is
mostly within 15 seconds in our Emulab and PlanetLab experiments.
We want to emphasize that even if false positive does
occur, it will only degrade a mTCP flow into a single-path flow.
This heuristic might encounter problems when
 . Because is small
(200ms in our experiments), this can only occur when a path is
so heavily congested that fast retransmit happens almost every 400ms.
The mTCP flows will try to suppress such paths, because using
them will not bring much benefit. This is discussed in
Section 3.4.1. . Because is small
(200ms in our experiments), this can only occur when a path is
so heavily congested that fast retransmit happens almost every 400ms.
The mTCP flows will try to suppress such paths, because using
them will not bring much benefit. This is discussed in
Section 3.4.1.
Finally, when two paths have different latencies, there is a time-lag,  ,
between them. We estimate by shifting one sequence, say ,
by ,
between them. We estimate by shifting one sequence, say ,
by  in time and calculating in time and calculating
 on sequences
( on sequences
( , ,  , ..., , ...,  ) and ( ) and ( , ,  , ..., , ...,  )
as described before. Because the between two paths can
be at most one )
as described before. Because the between two paths can
be at most one  ( is the larger round trip time of the two paths),
we go through all possible value in ( is the larger round trip time of the two paths),
we go through all possible value in  incrementally using
some fundamental step incrementally using
some fundamental step  , then choose that maximizes
as . This is similar to calculate the correlation between two signals. , then choose that maximizes
as . This is similar to calculate the correlation between two signals.
Path Selection
In the previous sections, we assumed that flows have a number of
candidate paths. Now we describe how they obtain such information.
We use Resilient Overlay Networks (RON) [8] as our
underlying routing layer. RON is an application-layer
overlay.When mTCP starts, it queries RON to obtain multiple paths between
a source-destination pair. For each pair, RON provides the direct Internet path and alternate single-hop
indirect paths through other RON nodes. With a RON of  nodes,
there are totally nodes,
there are totally  paths between each pair. RON uses a score to
represent the quality of each path based on latency,
loss rate or throughput.
RON can effectively bybass performance failure or
path faults by using an alternate path with higher score.
In the following, we only use the throughput score. paths between each pair. RON uses a score to
represent the quality of each path based on latency,
loss rate or throughput.
RON can effectively bybass performance failure or
path faults by using an alternate path with higher score.
In the following, we only use the throughput score.
Since  can be large (greater than 10 in our experiments), mTCP
will only select at most can be large (greater than 10 in our experiments), mTCP
will only select at most  (5 in our experiments) paths from them.
A single-path flow will normally select the path with the best score,
which we call the RON path. mTCP could
select the best paths. But this simple strategy may select
paths with many overlapping physical links. This leads to two disadvantages:
First, paths are more likely to fail simultaneously, which is bad for
the robustness.
Second, paths are more likely to share congestion, which is bad for performance.
To avoid these problems, we want to select sufficiently disjoint paths. (5 in our experiments) paths from them.
A single-path flow will normally select the path with the best score,
which we call the RON path. mTCP could
select the best paths. But this simple strategy may select
paths with many overlapping physical links. This leads to two disadvantages:
First, paths are more likely to fail simultaneously, which is bad for
the robustness.
Second, paths are more likely to share congestion, which is bad for performance.
To avoid these problems, we want to select sufficiently disjoint paths.
We use a heuristic based on traceroute to estimate the disjointness of
paths.
Using traceroute, we can obtain the IPs of the routers along a path
and the latency of each physical link.
Due to IP aliases, the same router might have different IPs in different
paths. We use ``Ally'', a tool from Rocketfuel [30], to
resolve IP aliases and assign a unique IP to each router.
Although some routers may not respond to traceroute probes and the alias
resolution may not be completely accurate, we only use the traceroute
information as a hint to estimate path disjointness and eliminate
many of the significantly overlapping paths. We also rely on the techniques
described in Section 3.2 to further detect shared congestion.
After alias resolution, suppose we have the IPs of two paths
 and and
 . Let
be the set of overlapping links of . Let
be the set of overlapping links of  and and  , we define
the overlapping between and as: , we define
the overlapping between and as:
 .
An alternative is to use the size of to quantify the degree of
overlap. We use latency instead because we hope to distinguish
among different types of link. Most nodes on PlanetLab
are connected through ethernet links to backbones. Those ethernet
links usually have smaller latency than backbone links.
Because the sharing of the local ethernet links are almost unavoidable,
we focus on finding disjoint paths that traverse different backbone links.
By using link latencies, .
An alternative is to use the size of to quantify the degree of
overlap. We use latency instead because we hope to distinguish
among different types of link. Most nodes on PlanetLab
are connected through ethernet links to backbones. Those ethernet
links usually have smaller latency than backbone links.
Because the sharing of the local ethernet links are almost unavoidable,
we focus on finding disjoint paths that traverse different backbone links.
By using link latencies,
 will be mostly determined by the
shared backbone links instead of ethernet links. This argument
might not be true if nodes are connected through modem or wireless links
that have high latency. Using traceroute to find disjoint paths is only suitable for small-scale
overlay networks. As the number of nodes increases, we need a more scalable
way to discover disjoint paths. In [23], Nakao, Peterson and Bavier
propose to use BGP information to find disjoint Autonomous System (AS) paths,
which incur little cost. Athough disjoint AS paths are not as
fine-grained as disjoint router-level paths, it would greatly simplify
disjoint path search by providing a small set of promising candidate
paths which we can further verify using traceroute. will be mostly determined by the
shared backbone links instead of ethernet links. This argument
might not be true if nodes are connected through modem or wireless links
that have high latency. Using traceroute to find disjoint paths is only suitable for small-scale
overlay networks. As the number of nodes increases, we need a more scalable
way to discover disjoint paths. In [23], Nakao, Peterson and Bavier
propose to use BGP information to find disjoint Autonomous System (AS) paths,
which incur little cost. Athough disjoint AS paths are not as
fine-grained as disjoint router-level paths, it would greatly simplify
disjoint path search by providing a small set of promising candidate
paths which we can further verify using traceroute.
Finally, we estimate the disjointness of and by:
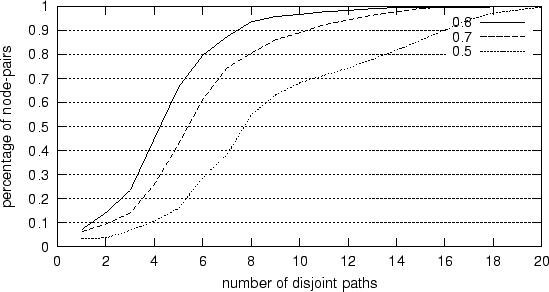
Figure 1:
CDF of number of disjoint paths between node-pairs
|
We say that and are disjoint if
 .
Using the disjointness metric between each pair of paths, we select at most paths from paths
using a greedy algorithm as follows: (1) Initialize the set of selected paths
to be empty. (2) Pick the path with the highest score from the set of
paths and check if it is disjoint from all the previously selected paths.
(3) If so, select this path, otherwise pick the path with
the next highest score and repeat step (2) until we find paths or
we have tried all paths. The first selected forward path and the reverse path
will always be the RON path, which is optimized for throughput
in RON. .
Using the disjointness metric between each pair of paths, we select at most paths from paths
using a greedy algorithm as follows: (1) Initialize the set of selected paths
to be empty. (2) Pick the path with the highest score from the set of
paths and check if it is disjoint from all the previously selected paths.
(3) If so, select this path, otherwise pick the path with
the next highest score and repeat step (2) until we find paths or
we have tried all paths. The first selected forward path and the reverse path
will always be the RON path, which is optimized for throughput
in RON.
Figure 1 plots the cumulative distribution function (CDF) of
the number of disjoint paths between 630 node pairs based on traceroute among 36
PlanetLab nodes that are used in our experiments. When  decreases,
the number of disjoint paths between node-pairs increases. We want a such
that there are sufficient number of disjoint paths which we can choose from while
eliminating most significantly overlapping paths.
When decreases,
the number of disjoint paths between node-pairs increases. We want a such
that there are sufficient number of disjoint paths which we can choose from while
eliminating most significantly overlapping paths.
When  (the value used in our experiments), 90% of node-pairs have
more than 4 disjoint paths but less than 16 disjoint paths. If we use a larger ,
many node pairs will not have enough candidate disjoint paths. (the value used in our experiments), 90% of node-pairs have
more than 4 disjoint paths but less than 16 disjoint paths. If we use a larger ,
many node pairs will not have enough candidate disjoint paths.
Path Management
Path Suppression
In mTCP, a subflow  on may be suppressed
because of one of the three reasons: First, shares congestion with
another subflow on may be suppressed
because of one of the three reasons: First, shares congestion with
another subflow  and its throughput and its throughput  is lower than is lower than  .
This is because we want mTCP not to be too aggressive to other single-path TCP flows.
Second, suppose has the highest throughput among all the subflows and .
This is because we want mTCP not to be too aggressive to other single-path TCP flows.
Second, suppose has the highest throughput among all the subflows and
 .
This is because is too poor and using it does not bring much benefit.
Third, fails. .
This is because is too poor and using it does not bring much benefit.
Third, fails.
We define a family of mTCP flows, called  flows. An
flow will try to use at least flows. An
flow will try to use at least  ( ( ) paths, which means we will not
suppress any path because of shared congestion when the number of paths
being used is less than or equal to . For example, this avoids
all paths getting suppressed in ) paths, which means we will not
suppress any path because of shared congestion when the number of paths
being used is less than or equal to . For example, this avoids
all paths getting suppressed in  flows.
The value of is a tradeoff between performance/robustness and
friendliness. With a larger , mTCP can obtain more
bandwidth because it uses more paths. And it is more reliable
because the probability that paths fail simultaneously
normally gets smaller as increases.
But it can be more aggressive to single-path flows under shared congestion.
The aggressiveness problem can be alleviated by suppressing some subflows.
But when there are only subflows, no subflow would be
suppressed. The actual value of should be decided by the application.
Applications that want higher performance and more reliability should
choose a larger . Applications that care more about friendliness
should choose a smaller . In our experiments, we choose flows.
The value of is a tradeoff between performance/robustness and
friendliness. With a larger , mTCP can obtain more
bandwidth because it uses more paths. And it is more reliable
because the probability that paths fail simultaneously
normally gets smaller as increases.
But it can be more aggressive to single-path flows under shared congestion.
The aggressiveness problem can be alleviated by suppressing some subflows.
But when there are only subflows, no subflow would be
suppressed. The actual value of should be decided by the application.
Applications that want higher performance and more reliability should
choose a larger . Applications that care more about friendliness
should choose a smaller . In our experiments, we choose  to
demonstrate how much performance improvement mTCP can obtain
without being too aggressive to other TCP flows. to
demonstrate how much performance improvement mTCP can obtain
without being too aggressive to other TCP flows.
Path Addition
An flow can dynamically add new paths because of two reasons:
First, some paths that are not being used become better than those paths being used.
Second, it is using less than paths because some paths are too bad or have failed.
mTCP will periodically update the information about all the paths
by querying RON. If an unused path has much higher a score than a path
being used, it can start using the new path. Then it runs the path suppression
algorithm on all the paths to suppress any possible paths with shared congestion.
By doing this, mTCP can gradually replace bad paths with good ones. This is
especially useful for long-lived flows.
Path Failure Detection and Recovery
mTCP may encounter path failures during transmission. If all the paths
fail simultaneously, we call it a fatal path failure,
otherwise we call it a partial path failure. We will focus on
partial failures in this section.
To recover from fatal failures, mTCP rely on the routing layer to establish
new paths just like single-path flows.
When a path fails, the data packets sent over it will no longer be
acknowledged (ACKed) because the packets have been dropped.
We maintain one failure detection timer,  , for each .
When a data packet sent over is ACKed, is
reset. is considered to have failed when expires. , for each .
When a data packet sent over is ACKed, is
reset. is considered to have failed when expires.
We need to decide a timeout value  for . On one
hand, we want a small so that failures can be detected quickly.
On the other hand, cannot be too small, otherwise it may misinterpret
good path to have failed.
The retransmission timeout ( for . On one
hand, we want a small so that failures can be detected quickly.
On the other hand, cannot be too small, otherwise it may misinterpret
good path to have failed.
The retransmission timeout ( ) provides a good base for computing
. First, during timeout, the sender will go into idling and
no packets will be ACKed in that period. So should be at least
greater than . Second, several consecutive timeouts means either the path
has failed or it is heavily congested. In either case, we would
like to abandon .
So we choose ) provides a good base for computing
. First, during timeout, the sender will go into idling and
no packets will be ACKed in that period. So should be at least
greater than . Second, several consecutive timeouts means either the path
has failed or it is heavily congested. In either case, we would
like to abandon .
So we choose
 . Here . Here  reflects how
many consecutive retransmission timeouts mTCP is willing
to tolerate before it consider a path to have failed. In our
experiments, we choose reflects how
many consecutive retransmission timeouts mTCP is willing
to tolerate before it consider a path to have failed. In our
experiments, we choose  , because we have observed that
consecutive retransmission timeouts rarely occur on good paths.
We should emphasize that even if a good path is misinterpreted as a
failed one, it will only degrade the performance of
mTCP to that of a single-path flow in the worst case.
The path addition technique described in Section 3.4.2
allows us to reclaim a path if it had been previously misinterpreted
to be a failed path. , because we have observed that
consecutive retransmission timeouts rarely occur on good paths.
We should emphasize that even if a good path is misinterpreted as a
failed one, it will only degrade the performance of
mTCP to that of a single-path flow in the worst case.
The path addition technique described in Section 3.4.2
allows us to reclaim a path if it had been previously misinterpreted
to be a failed path.
Failure Recovery
We now describe how to recover from failure after expires.
Since all ACKs return over the same path, we call that path a
primary path. The other paths are auxiliary paths. We need to
distinguish between primary and auxiliary path failures.
When an auxiliary fails, the sender will mark as failed and retransmit the
outstanding packets of over other paths.
When a primary path fails, the situation is more complicated.
Because all the ACKs are lost, it may appear to the sender
that all paths have failed. To deal with this problem, sender records the time  when
is detected to have failed. Suppose at time , the primary when
is detected to have failed. Suppose at time , the primary  is
also detected to have failed and let the timeout of is
also detected to have failed and let the timeout of  be be
 . We know that must have failed at some point between . We know that must have failed at some point between  and .
For an auxiliary , if and .
For an auxiliary , if
 , its
failure is possibly due to the failure of . In this case,
we will change the status of to be active and the status of
to be failed. After doing this for all the paths, the sender
starts to send packets over all active paths. During this period,
these data packets serve as ``probing'' packets that solicit ACKs from
the receiver. All timers are stopped to prevent
any auxiliary path from being misinterpreted as failed due to
the lack of an active primary path during this period.
The receiver will also detect the primary path
failure because it no longer receives any data packets over that
path.
Then it elects a new primary path and sends ACKs along that path
in response to those ``probing'' packets from sender.
It chooses the best path (based on the path score in RON) among
all the active paths to be the new primary path. Later, when the
sender receives the ACKs and knows that a new primary path has
been elected, it restarts all the timers and proceeds as normal. , its
failure is possibly due to the failure of . In this case,
we will change the status of to be active and the status of
to be failed. After doing this for all the paths, the sender
starts to send packets over all active paths. During this period,
these data packets serve as ``probing'' packets that solicit ACKs from
the receiver. All timers are stopped to prevent
any auxiliary path from being misinterpreted as failed due to
the lack of an active primary path during this period.
The receiver will also detect the primary path
failure because it no longer receives any data packets over that
path.
Then it elects a new primary path and sends ACKs along that path
in response to those ``probing'' packets from sender.
It chooses the best path (based on the path score in RON) among
all the active paths to be the new primary path. Later, when the
sender receives the ACKs and knows that a new primary path has
been elected, it restarts all the timers and proceeds as normal.
Typically, is one second, therefore the is two seconds.
The total detection and recovery time will be between two and three
seconds in most cases. The interruption due to partial path failures will
be fairly short. Furthermore, partial path failure does not cause mTCP
to stall since packets will continue to be transmitted through living
paths. Since mTCP uses several paths concurrently and since it typically
employs disjoint paths, the probability of fatal path failures is
much lower than that of single-path failure. mTCP is therefore more robust than
single-path flows.
Implementation
Our system is implemented at the user-level and is composed of
a Portable User-Level TCP/IP stack (PULTI) and an overlay router/forwarder
modified from RON. RON is an application-layer overlay on top of the Internet.
PULTI and RON run in two separate processes and we change RON so that it can
communicate with PULTI using UDP sockets and export the multiple paths between
a source-destination pair. The whole system does not
require any root privilege, which can easily be deployed on shared
distributed platforms such as PlanetLab. Currently, it runs on Linux,
NetBSD and FreeBSD. Note that although our system in build on top of overlay
networks, it will work in a non-overlay setting as well. The only requirement
of our system is there exists an underlying routing system that can provide
multiple paths between a source-destination pair and let us select paths
for sending packets. Overlay network is just one of such systems. Our system
will also work in other Internet settings, such as multi-homed hosts.
PULTI is a full user-level TCP/IP stack based on FreeBSD 4.6.2. We extract
the network-related code from the kernel source and wrap it with some basic
kernel environment support, such as timing, timer, synchronization and
memory allocation. We do not modify any network-related code.
Because FreeBSD 4.6 does not support SACK, we also add SACK-related code in
PULTI which is required by our system. OS dependent information is hidden
by device drivers. With different device drivers, PULTI can send or receive
through UDP socket, IP_QUEUE in Linux or divert socket in FreeBSD.
PULTI provides standard socket interface and supports multiple applications
through multithreading.
It can query RON to learn about multiple paths between a source-destination
pair.
The mTCP code only affects a few files in PULTI. It can be easily moved into
FreeBSD kernel.
Evaluation
In this section, we validate our protocol in both emulation
and real-world deployment. The emulations are run on
Emulab [2], which is a time- and space-shared network
emulator. Emulab consists of several hundred PCs, which can be
configured to emulate different network scenarios. Users can
specify parameters such as packet loss rate, latency, and bandwidth.
While an experiment is running, the experiment gets
exclusive use of the assigned machines.
While Emulab provides a controlled environment for our
experiments, we further conduct experiments on PlanetLab, a wide-area
distributed testbed for running large-scale network
services [25]. The experiments on the PlanetLab allow us
to study our protocol for Internet settings, where latency,
bandwidth and background traffic are more realistic and unpredictable.
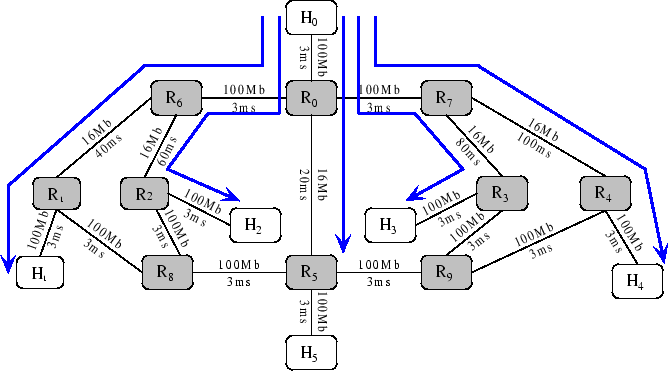
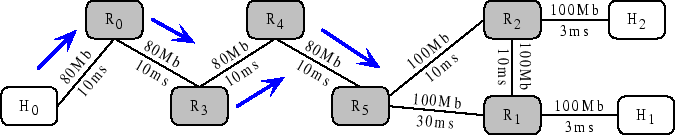
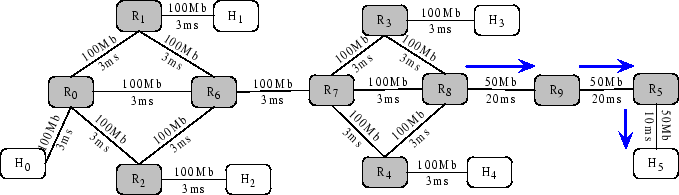
Figure 2:
Topology of multiple independent paths on Emulab
|
In this experiment, we study whether mTCP can
obtain the total available bandwidth over multiple independent paths.
We use the topology in
Figure 2 on Emulab.
Because each PC in Emulab has
four Ethernet cards, each node can have at most four links.
There are six endhosts
( ) and ten routers ( ) and ten routers ( ). RON is running on the six endhosts to
construct an overlay network. All routers have drop-tail queues. The
source and destination nodes are ). RON is running on the six endhosts to
construct an overlay network. All routers have drop-tail queues. The
source and destination nodes are  and and  respectively. Each of the
remaining endhosts provides an alternate path. For example, we can
use respectively. Each of the
remaining endhosts provides an alternate path. For example, we can
use  to construct an alternate path to construct an alternate path
 .
So the topology contains five independent paths, which
include one direct path and four alternate paths.
We use the direct path as the reverse path for ACKs.
The capacity of all
the paths is 16Mbps and their RTTs vary from 52-147ms.
The figure annotates each link
with its corresponding bandwidth and latency. The arrows represent background flows.
We use Iperf [1] to generate 25 TCP and 25 1Mbps UDP flows as background traffic, with 5 TCP
and 5 UDP flows on each path. Each experiment runs for 40 seconds and the results
are obtained by averaging three runs. .
So the topology contains five independent paths, which
include one direct path and four alternate paths.
We use the direct path as the reverse path for ACKs.
The capacity of all
the paths is 16Mbps and their RTTs vary from 52-147ms.
The figure annotates each link
with its corresponding bandwidth and latency. The arrows represent background flows.
We use Iperf [1] to generate 25 TCP and 25 1Mbps UDP flows as background traffic, with 5 TCP
and 5 UDP flows on each path. Each experiment runs for 40 seconds and the results
are obtained by averaging three runs.
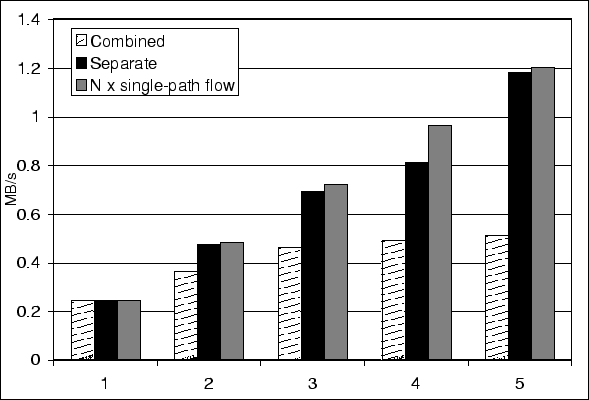
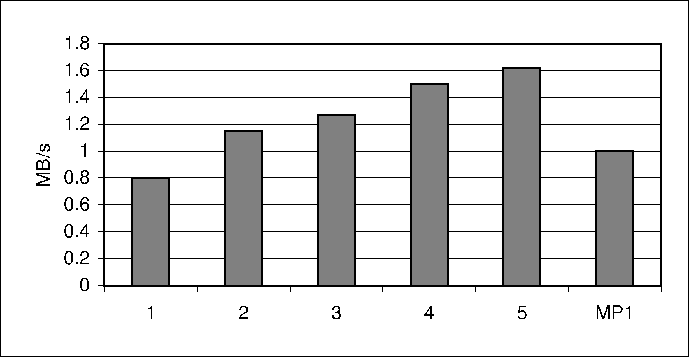
Figure 3:
Throughput of mTCP flows with combined or separate congestion control
as number of paths increases from 1 to 5
|
Figure 3 shows the results when the number of
paths used by mTCP increases from 1 to 5. In this
figure, ``combined'' represents mTCP flows with congestion
control performed on the entire flow, ``separate'' represents regular
mTCP flows with congestion control performed separately on each
subflow, and ``NxSingle-path flow'' is the throughput of a single-path
flow on one path multiplied by the number of paths. Because each path
has the same available bandwidth, ``NxSingle-path'' throughput
represents the ideal throughput of a mTCP flow. The
results verify that mTCP can effectively aggregate the
available bandwidth on multiple independent paths. The results also
show that higher throughput can be achieved only when congestion control
is performed for each subflow separately.
Table 1:
Independent paths between Princeton and Berkeley nodes on PlanetLab.
| Path |
Intermediate node |
RTT(ms) |
| 0 |
direct path |
80.165 |
| 1 |
planetlab1.nbgisp.com |
112.503 |
| 2 |
planet2.berkeley.intel-research.net |
71.639 |
| 3 |
planet2.pittsburgh.intel-research.net |
96.641 |
| 4 |
planet2.seattle.intel-research.net |
90.305 |
|
We conduct similar experiments on PlanetLab.
We use one node in Princeton and one node in Berkeley
as source and destination nodes.
As shown in Table 1, the four Intel nodes serve as
intermediate nodes for the alternate paths.
We only use the four alternate paths in this experiment, because they
do not share any congestion links. To verify this, we examined the
traceroute data to find that any pair of the alternate paths only
share the initial and final hops, which are unavoidable. The capacity
of these two links are 100Mbps, which is far greater than the total
throughput of the single-path TCP flows on these four
paths. Therefore, we conclude that the initial and final hops are not
congested and the four alternate paths are independent.
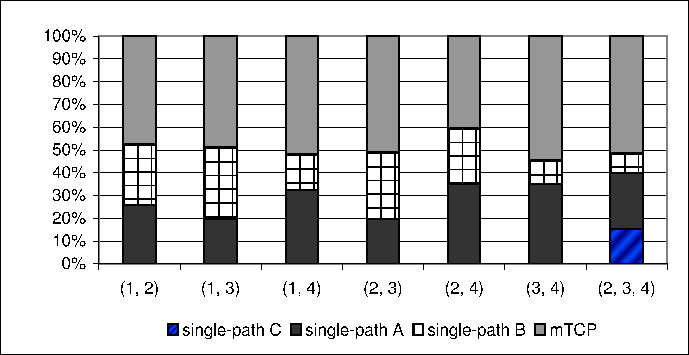
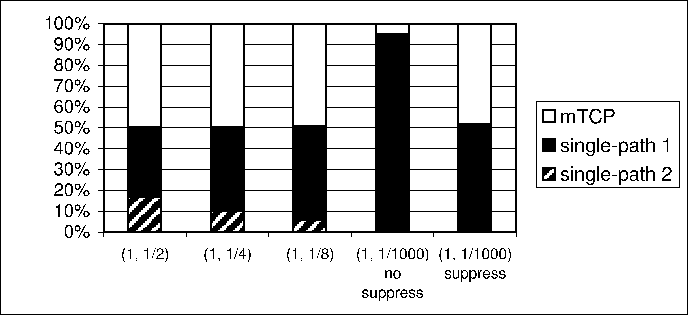
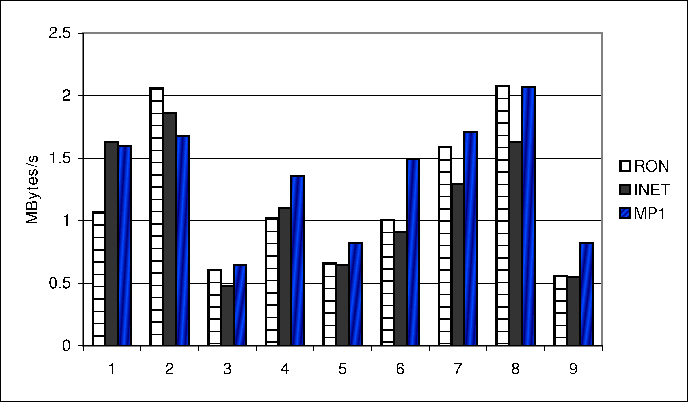
Figure 4:
Throughput percentage of individual flows
|
Each experiment measures the throughput of flows lasting for 60
seconds. The average throughput of three runs is reported. For
convenience, we use  to denote the throughput of a single-path
flow on . Similarly, to denote the throughput of a single-path
flow on . Similarly,  denotes the throughput of a
mTCP flow using and . In
Figure 4, (i,j) on the x-axis means and
are used in that experiment. We first run single-path flows
on and respectively, then run a mTCP flow on
both paths simultaneously. The corresponding column compares the
percentage that the throughput of an individual flow, , denotes the throughput of a
mTCP flow using and . In
Figure 4, (i,j) on the x-axis means and
are used in that experiment. We first run single-path flows
on and respectively, then run a mTCP flow on
both paths simultaneously. The corresponding column compares the
percentage that the throughput of an individual flow, ,  or , contributes to the total throughput of these flows.
Ideally, we expect
or , contributes to the total throughput of these flows.
Ideally, we expect
 ,
so the percentage of should be around 50%.
With the exception of the experiment involving ,
so the percentage of should be around 50%.
With the exception of the experiment involving  and and  ,
which suffered from unexpected bandwidth variations, the rest of the
experiments indeed provide the expected throughputs.
The last column in Figure 4 shows
the result of the experiment using , ,
which suffered from unexpected bandwidth variations, the rest of the
experiments indeed provide the expected throughputs.
The last column in Figure 4 shows
the result of the experiment using ,  , and .
Again, the net throughput of , and .
Again, the net throughput of  is close to the sum of is close to the sum of  , ,  and and
 . We have conducted experiments between different
source-destination pairs on PlanetLab. The results are similar. We
omit them due to space constraints. . We have conducted experiments between different
source-destination pairs on PlanetLab. The results are similar. We
omit them due to space constraints.
Table 2:
Paths used in the failure recovery experiment.
| Path |
Intermediate node |
RTT(ms) |
| 0 |
direct path |
80.165 |
| 1 |
planetlab02.cs.washington.edu |
102.890 |
|
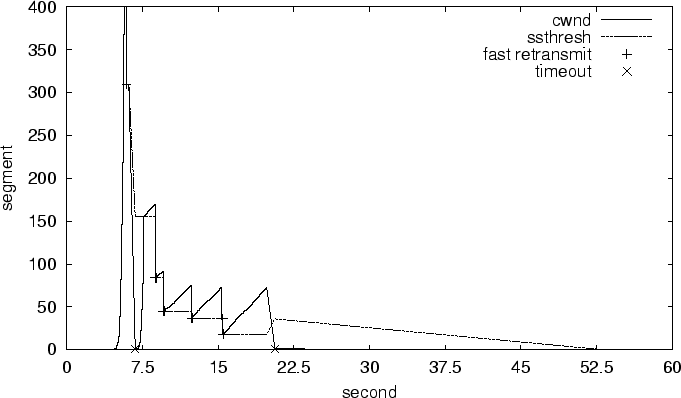
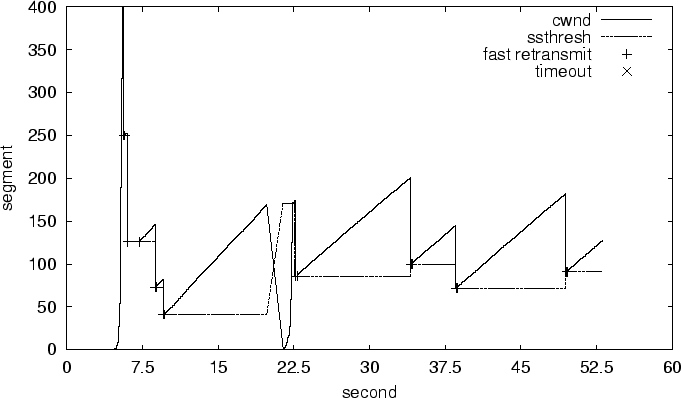
Figure 5:
of primary/auxiliary paths, primary fails
|
|
Now we will study whether mTCP can quickly recover from
partial path failures using experiments on PlanetLab. Because path
failures on the Internet are unpredictable, we intentionally introduce
failures by killing the appropriate RON agent. The source and
destination nodes are still the Princeton and Berkeley nodes.
The paths are shown in Table 2.
The two graphs in Figure 5 show how the
congestion window () of the primary and auxiliary paths changes over
time. As shown in the first graph in
Figure 5, the primary path fails at about 20s.
It is quickly detected so that the of the
subflow on this path is reduced to 0. At the same time,
the of the subflow on the auxiliary path also
decreases to 0, because the auxiliary path was misinterpreted to have
failed (as explained in Section 3.5.2). But a few
seconds later, the subflow on the auxiliary path recovers from this false
decision by restoring its to the previous value
with slow start. Finally the auxiliary path becomes the new primary
path and the whole flow proceeds using only one path. The behavior of
mTCP during auxiliary path failures is similar, and we omit the
corresponding results.
The total recovery time of mTCP during partial path
failures is only about 3s, which is negligible for most
applications. In contrast, a TCP flow will completely stall
when its path fails, and it typically takes about 18s for RON to
establish a new path. RON is optimized for quickly recovering from
path failures. On wide area network that uses BGP to detect
failures, recovery could take several minutes. Hence, mTCP is more
responsive and robust than single-path flows.
Detecting Shared Congestion
Figure 6:
Two independent paths used in shared congestion detection
|
Figure 7:
Two paths that completely share congestion
|
In this section, we will evaluate shared congestion detection. We
first use experiments on Emulab to study the behavior of our algorithm
with different parameters in a controlled environment. Then we further
validate it using experiments on PlanetLab. The topologies for the
Emulab experiments are shown in Figures 6
and 7.
Between the source node and the destination node  , there is
one direct path and one alternate path through the intermediate node
. , there is
one direct path and one alternate path through the intermediate node
.
In Figure 6,
The two paths
only share the initial and final hops with link capacities of 100Mbps.
We generate 12 TCP flows and 18 1Mbps UDP flows as
background traffic, with 2 TCP flows and 3 UDP flows on each link
between each pair of neighboring routers. With this scheme, we ensure
that congestion only occurs on the links between pairs of routers and
not on the links between endhosts and routers. As a result, the two
paths  and and
 are independent. are independent.
In Figure 7, The two paths share the four links between and  . We
generate 8 TCP flows and 8 1Mbps UDP flows as background traffic, with
2 TCP and 2 UDP flows on each of the four shared links. By doing this, we
ensure that congestion only occurs on the four shared links. As a
result, paths and
share
congested links. . We
generate 8 TCP flows and 8 1Mbps UDP flows as background traffic, with
2 TCP and 2 UDP flows on each of the four shared links. By doing this, we
ensure that congestion only occurs on the four shared links. As a
result, paths and
share
congested links.
Figure 8:
On two paths with shared congestion, increases as increases
|
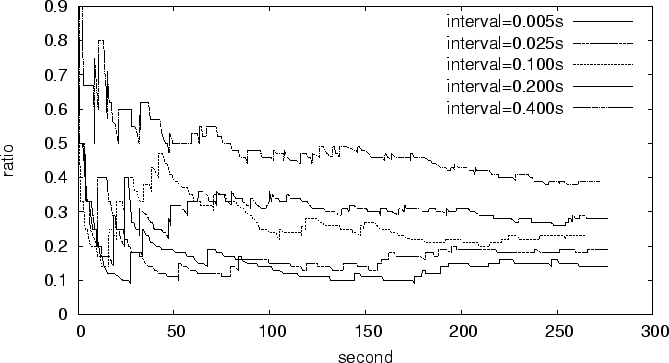
Figure 9:
On two independent paths, decreases faster when is smaller
|
We run mTCP flows for 300s using the two paths in
Figure 7. The results in
Figure 8 compare the estimated of shared
congestion with different values of 5ms, 10ms, 25ms, 50ms, 100ms,
200ms, and 400ms. Each data point represents the average
of five runs. As increases from 5 to 100ms,
increases quickly from 0.4 to 0.8 as expected. When
increases beyond 100ms, only increases slightly. When
is 400ms, reaches 0.96. The ideal is 1
because the two paths share all the congestion.
We next run mTCP flows for 300s on the two paths in
Figure 6. The results are shown in
Figure 9, which plots over time for different
values of 5ms, 25ms, 100ms, 200ms and 400ms.
As explained in
Section 3.2, a smaller will lead to
smaller estimated values of . At the end of the experiments,
drops quickly from 0.39 to 0.28 when decreases from 400
to 200ms. When deceases further, drops more slowly
until it reachs 0.14 when  . The ideal is 0
because the 2 paths are independent. We also notice that the curve
for a smaller value decreases faster than that for a larger
. . The ideal is 0
because the 2 paths are independent. We also notice that the curve
for a smaller value decreases faster than that for a larger
.
According to the above experiment results, an value between 100
and 200ms seems to balance the goal of minimizing both false negatives
and false positives. Consequently, the threshhold
should fall between 0.3 and 0.8. If it is less than 0.3, it is very
likely to cause false positives when the is 200ms. If
it is greater than 0.8, it can easily cause false negatives when the
is 100ms. By setting
 and and  , we
successfully detect shared congestion between the two paths
in all five runs for the topology in Figure 7.
For the topology in Figure 6, no shared congestion is
detected and the two paths are determined to be independent as expected. , we
successfully detect shared congestion between the two paths
in all five runs for the topology in Figure 7.
For the topology in Figure 6, no shared congestion is
detected and the two paths are determined to be independent as expected.
Next, we go on to evaluate the shared congestion detection on
PlanetLab. As explained in Section 3.2, by setting
to be no less than the congestion period during which bursty losses
occur, we can avoid false negatives. In [35], the authors find
that 95% of the duration of bursty losses on the Internet are very short-lived
(less than 220ms). By choosing an around that value,
we should be able to avoid most false negatives. At the same time, the average
time between consecutive fast retransmits is mostly on the order of several
seconds or more, much greater than 220ms. (Otherwise, mTCP will suppress such
path because the path is too lossy.) Therefore, this value will also allow
us to avoid most false positives, as long as we wait for enough number of
fast retransmits.
In the following experiments, we report the results using
and .
We first need to choose paths such that we can be
reasonably sure as to whether they share congestion or not. Then, we can
compare the measured results with the expected results. We conduct two
sets of experiments. The mTCP flow is running on a pair of paths
for 60 seconds in each experiment. As explained in
Section 3.2, the probability of false positive
decreases very fast as the number of fast retransmit increases. We
find that a 60 second period is long enough for our algorithm to
converge. Each experiment is repeated three times. We use the
Princeton and Berkeley nodes
as source and destination in all experiments, but we choose different
pairs of paths in different sets of experiments.
Table 3:
Shared congestion detection for independent paths.
| Path |
Run 1 |
Run 2 |
Run 3 |
|
|
| 1 2 |
No |
No |
No |
|
|
| 1 3 |
No |
No |
No |
|
|
| 1 4 |
No |
No |
No |
|
|
| 2 3 |
No |
No |
No |
|
|
| 2 4 |
N/A |
Yes |
No |
|
|
| 3 4 |
No |
No |
No |
|
|
|
In the first set of experiments, we use the four alternate paths in
Table 1, where we know that all these paths are
independent. The results are in Table 3. The first
column shows the pairs of paths used by the mTCP flows. The
remaining three columns show the results. A No means two paths are
independent, a Yes means they share congestion, and N/A
means one of the subflows is suppressed because its throughput is much
lower than the other subflow before the end of the experiment. All the
results in Table 1 conform to our expectation except the
one false positive for using and . As explained
before, a false positive will only degrade the performance of the
mTCP flow to that of a single-path flow.
Table 4:
Paths with shared congestion on PlanetLab.
| Path |
Intermediate node |
RTT(ms) |
| 0 |
direct path |
80.165 |
| 1 |
planetlab2.cs.duke.edu |
96.138 |
| 2 |
planetlab2.cs.cornell.edu |
100.382 |
| 3 |
vn2.cs.wustl.edu |
92.267 |
|
Table 5:
Shared congestion detection for correlated flows.
| Path |
Run 1 |
Run 2 |
Run 3 |
Average |
| 0 1 |
7.000 |
9.975 |
4.266 |
7.080 |
| 0 2 |
4.276 |
3.223 |
6.011 |
4.503 |
| 0 3 |
6.847 |
3.263 |
14.214 |
8.108 |
| 1 2 |
12.184 |
8.906 |
16.804 |
12.631 |
| 1 3 |
4.478 |
10.101 |
13.131 |
9.237 |
| 2 3 |
12.380 |
9.873 |
17.845 |
13.366 |
|
The second set of experiments use the paths in
Table 4. From traceroute, we know the underlying
physical links of any pair of these paths are mostly overlapping, so
they should share congested links. The results are shown in
Table 5. The first column gives the pairs of paths
used in the experiments. The following three columns give the time in
seconds when shared congestion is detected in each run. The last column
gives the average detection time. Shared congestion is correctly detected
in all cases.
Unlike other shared congestion detection algorithms, our algorithm
seeks to minimize the detection time while maintaining a low false
positive rate. In the second set of experiments, shared
congestion is correctly detected mostly within 15 seconds. At the same time,
such early decisions do not cause too many false positives in the first
set of experiments.
Alleviating Aggressiveness with Path Suppression
Figure 10:
All paths share congestion in this topology
|
Figure 11:
flows are less aggressive than other mTCP flows
|
In this section, we demonstrate mTCP can be more
friendly to other single-path flows by suppressing its subflows that
share congestion. We construct the topology of
Figure 10 on Emulab.
The source and destination nodes are and
. There are one direct path and four alternate paths provided by the
remaining four endhosts. Their RTTs are from 124ms to 133ms and they share
the three links between  and . We generate
12 1Mbps UDP flows as background traffic, with 4 UDP flows on each of
the three shared links. By doing this, we ensure that all five paths
share congestion. Each experiment runs for 300 seconds and the
results are obtained by averaging three runs. and . We generate
12 1Mbps UDP flows as background traffic, with 4 UDP flows on each of
the three shared links. By doing this, we ensure that all five paths
share congestion. Each experiment runs for 300 seconds and the
results are obtained by averaging three runs.
In Figure 11, the first five columns give the
throughput of the flows when the number of paths being used increases
from one to five. The first column is the throughput of single-path
TCP flows. Under shared congestion, the mTCP flows become more
aggressive as they use more paths. The sixth column shows the throughput
of the mTCP flow with path suppression. Although it uses five paths
in the beginning, it quickly detects shared congestion and suppresses all
but one path. So its throughput is very close to that of a single-path
flow and less aggressive than the flow using all five paths without
suppression.
Suppressing Bad Paths
Figure 12:
Path suppression helps avoid using bad paths.
|
In this experiment, we demonstrate that mTCP can effectively aggregate
the bandwidth of multiple paths with sufficiently differing characteristic,
and path suppression can help avoid the penalty from using bad paths.
We use the same topology as in
Figure 2. The bandwidth of direct path is still
16Mbps. But the bandwidth of four alternate paths is 1/2, 1/4, 1/8 and
1/1000 of the bandwidth of the direct path.
In Figure 12,  on the x-axis means the direct
path and alternate path with 1/n bandwidth are used in that
experiment. We first run a single-path flow on each path
respectively, then run a mTCP flow on both paths. The
corresponding column compares the percentage that the throughput of an
individual flow contributes to the total throughput of these
flows. Ideally, the throughput percentage of mTCP flows should be
50%. Figure 12 shows mTCP can
efficiently utilize the aggregate bandwidth of two paths even when one
path has only 1/8 the bandwidth of the other path. The mTCP flows in
the last 2 columns use the direct path and the alternate path with 1/1000
bandwidth. Such a scenario could occur when a path becomes heavily
congested or even temporarily fails. Using such bad paths can bring no
benefit but impair the performance of the whole flow. Because most
packets are lost along that path, it persistently causes
timeouts. While packets can still be sent over the other path for some
time, the flow will finally stall when the send/receive buffer is
exhausted. As explained in Section 3.4.1,
mTCP will suppress the paths with too low a throughput to
avoid such penalty. (We choose on the x-axis means the direct
path and alternate path with 1/n bandwidth are used in that
experiment. We first run a single-path flow on each path
respectively, then run a mTCP flow on both paths. The
corresponding column compares the percentage that the throughput of an
individual flow contributes to the total throughput of these
flows. Ideally, the throughput percentage of mTCP flows should be
50%. Figure 12 shows mTCP can
efficiently utilize the aggregate bandwidth of two paths even when one
path has only 1/8 the bandwidth of the other path. The mTCP flows in
the last 2 columns use the direct path and the alternate path with 1/1000
bandwidth. Such a scenario could occur when a path becomes heavily
congested or even temporarily fails. Using such bad paths can bring no
benefit but impair the performance of the whole flow. Because most
packets are lost along that path, it persistently causes
timeouts. While packets can still be sent over the other path for some
time, the flow will finally stall when the send/receive buffer is
exhausted. As explained in Section 3.4.1,
mTCP will suppress the paths with too low a throughput to
avoid such penalty. (We choose  in our experiments.) This
is confirmed by the last two columns which represent the throughput of
mTCP flows with and without suppression. in our experiments.) This
is confirmed by the last two columns which represent the throughput of
mTCP flows with and without suppression.
Comparing with Single-Path Flows
Table 6:
The 10 endhosts used in the experiments that compare mTCP with single-path flows.
| Host Name |
Host Name |
| planetlab2.millennium.berkeley.edu |
planetlab2.postel.org |
| planetlab02.cs.washington.edu |
planetlab2.lcs.mit.edu |
| planetlab-2.cs.princeton.edu |
planetlab2.cs.ucla.edu |
| planetlab2.cs.uchicago.edu |
planet.cc.gt.atl.ga.us |
| planetlab2.cs.duke.edu |
pl2.cs.utk.edu |
|
We are going to compare three types of flows:
single-path flows using direct Internet path (INET), single-path flows
using RON path optimized for bandwidth (RON) and flows.
flows will use multiple paths when there is no shared
congestion. We use flows to demonstrate how much performance
improvement mTCP can obtain without being too aggressive to other TCP flows.
Table 6 shows the 10 nodes that serve as endhosts in
an overlay network for this experiment. (We actually use a
total of 24 nodes to form the overlay network, with the remaining 14
nodes only serving the role of packet forwarders.) For each
source-destination pair, we transfer data for 40 seconds using each of
the three types of flows. Each experiment is repeated three times and we report
the average throughput.
The available bandwidth of the paths between the pairs of endhosts can
be very high, because nine of them are connected to Internet2.
We bypass those pairs with very high available bandwidth on
the corresponding direct paths because: First, these paths are between
pairs of nodes that exhibit shared congestion/bottleneck at the initial
and/or final hops. Second, the bandwidth-delay products of the paths
between such pairs of nodes are very large. The maximum
send/receive buffer size of our user-level TCP implementation
is 1MB and is not large enough to utilize the bandwidth on other
alternate paths besides the direct path.
We estimate the available bandwidth of a direct path between a
source-destination pair by running a TCP flow for 10 seconds. If the
measured throughput is less than  Mbps, we will use that pair for our
experiments.
Among the 90 pairs, we got 15 pairs
that satisfy the above condition. We want to emphasize that we are not trying
to study the popularity of independent paths with distinct points of congestion between
node-pairs on the
Internet; such topic has been studied by others [6].Instead, we focus on demonstrating that
mTCP can achieve better performance by taking advantage
of such redundant paths. Mbps, we will use that pair for our
experiments.
Among the 90 pairs, we got 15 pairs
that satisfy the above condition. We want to emphasize that we are not trying
to study the popularity of independent paths with distinct points of congestion between
node-pairs on the
Internet; such topic has been studied by others [6].Instead, we focus on demonstrating that
mTCP can achieve better performance by taking advantage
of such redundant paths.
Figure 13:
mTCP flows achieve better throughput than single-path flows
|
Among the 15 pairs, flows achieve significantly higher
throughput in 6 pairs, as shown in Figure 13.
They achieve 33% to more than a factor of 60 better performance
than single-path flows.
We have to mention that flows only try to aggregate the available
bandwidth on multiple paths when there is no shared congestion.
Other ( ) flows would obtain better performance, but they are
potentially more aggressive. ) flows would obtain better performance, but they are
potentially more aggressive.
The performance improvement of mTCP does not solely come from bandwidth aggregation on
multiple paths, it is also because mTCP can help select better paths
than those provided by the routing layer, such as the direct path or
the RON path optimized for throughput.
RON estimates the available bandwidth of a path using
 . Here is the packet loss rate
and . Here is the packet loss rate
and  is the round trip time, both of which are obtained by active probing.
Although it can help RON distinguish paths with significant performance difference
and select better alternate path, this estimate may not be accurate; a path with
high score may actually have low available bandwidth [8].
In mTCP, the sender can monitor the performance of several
paths in parallel. The throughput of each subflow provides a fairly good estimate of
the available bandwidth on that path.
This does not require any active probing because the data packets serve
as probing packets.
This can help mTCP discover and utilize better paths than the suboptimal
RON path or direct path. We examined the paths in those 6 pairs and found that flows do take
paths different from either the direct paths or the RON paths.
The achieved throughput of on those paths are higher than that of direct path or RON path. is the round trip time, both of which are obtained by active probing.
Although it can help RON distinguish paths with significant performance difference
and select better alternate path, this estimate may not be accurate; a path with
high score may actually have low available bandwidth [8].
In mTCP, the sender can monitor the performance of several
paths in parallel. The throughput of each subflow provides a fairly good estimate of
the available bandwidth on that path.
This does not require any active probing because the data packets serve
as probing packets.
This can help mTCP discover and utilize better paths than the suboptimal
RON path or direct path. We examined the paths in those 6 pairs and found that flows do take
paths different from either the direct paths or the RON paths.
The achieved throughput of on those paths are higher than that of direct path or RON path.
Figure 14:
Throughput of mTCP and single-path flows is comparable
|
Figure 14 shows the results of the remaining 9
pairs. By examining the paths, we find that all flows degrade
to single-path flows because of shared congestion, and the RON/INET/
flows all take the same single path for the whole transfer. Hence, the throughput
of flows should be comparable to that of INET/RON flows,
as shown in Figure 14.
In three pairs, flows obtain slightly lower performance than RON/INET flows,
this is because different types of flows are run sequentially and there is
minor fluctuations in the available bandwidth of a path over time.
Conclusions
In this paper, we present mTCP, a transport layer protocol, for improving
end-to-end throughput and robustness. mTCP can efficiently aggregate the
available bandwidth on several paths in parallel. To address the
aggressiveness of mTCP during shared congestion,
we integrate a shared congestion detection mechanism into
our system so that correlated subflows can be suppressed. mTCP
flows are more robust to path failures than TCP flows,
because they will not stall even when some paths fail. The failure
detection time is within several seconds. We also propose a heuristic
to find disjoint paths based on traceroute.
We have implemented our system on top of overlay networks and
evaluated it on PlanetLab and Emulab.
- 1
-
https://dast.nlanr.net/projects/iperf/.
- 2
-
https://www.emulab.net.
- 3
-
https://www.isi.edu/nsnam/ns.
- 4
-
H. Adiseshu, G. M. Parulkar, and G. Varghese.
A reliable and scalable striping protocol.
In Proceedings of ACM SIGCOMM, 1996.
- 5
-
A. Akella, B. Maggs, S. Seshan, A. Shaikh, and R. Sitaraman.
A measurement-based ananlysis of multihoming.
In Proceedings of ACM SIGCOMM, Aug. 2003.
- 6
-
A. Akella, S. Seshan, and A. Shaikh.
An empirical evaluation of wide-area Internet bottlenecks.
In Proceedings of ACM Internet measurement conference, Oct.
2003.
- 7
-
M. Allman, H. Kruse, and S. Ostermann.
An application-level solution to TCP's satellite inefficiencies.
In Proceedings of WOSBIS, Nov. 1996.
- 8
-
D. Andersen, H. Balakrishnan, F. Kaashoek, and R. Morris.
Resilient overlay networks.
Proceedings of ACM SOSP, Oct. 2001.
- 9
-
J. Apostolopoulos, T. Wong, W. Tan, and S. Wee.
On multiple description streaming with content delivery networks.
In Proceedings of IEEE INFOCOM, 2002.
- 10
-
A. Banerjea.
Simulation study of the capacity effects of dispersity routing for
fault tolerant realtime channels.
Proceedings of ACM SIGCOMM, Aug. 1996.
- 11
-
B. Chazelle.
The discrepancy method: randomness and complexity.
Cambridge University Press, 2000.
- 12
-
J. Duncanson.
Inverse multiplexing.
In IEEE Communications Magazine, volume 32, pages 34-41, 1994.
- 13
-
A. Feldmann, A. Greenberg, C. Lund, N. Reingold, J. Rexford, and F. True.
Deriving traffic demands for operational IP networks: methodology
and experience.
Proceedings of ACM SIGCOMM, Aug. 2000.
- 14
-
T. Hacker, B. Athey, and B. Noble.
The end-to-end performance effects of parallel TCP sockets on a
lossy wide-area network.
In Proc. of IPDPS, 2002.
- 15
-
K. Harfoush, A. Bestavros, and J. Byers.
Robust identification of shared losses using end-to-end unicast
probes.
Proceedings of IEEE ICNP, Oct. 2000.
- 16
-
H. Hsieh and R. Sivakumar.
ptcp: An end-to-end transport layer protocol for striped connections.
In Proceedings of IEEE ICNP, 2002.
- 17
-
H. Hsieh and R. Sivakumar.
A transport layer approach for achieving aggregate bandwidths on
multi-homed mobile hosts.
In Proceedings of ACM MOBICOM, 2002.
- 18
-
D. Katabi, I. Bazzi, and X. Yang.
An information theoretic approach for shared bottleneck inference
based on end-to-end measurements.
In Class Project, MIT Laboratory for Computer Science, 1999.
- 19
-
J. Lee, D. Gunter, B. Tierney, B. Allcock, J. Bester, J. Bresnahan, and
S. Tuecke.
Applied techniques for high bandwidth data transfers across wide area
networks.
In Proceedings of CHEP, Sept. 2001.
- 20
-
Y. Liang, E.G.Steinbach, and B. Girod.
Real-time voice communication over the Internet using packet path
diversity.
In Proceedings of ACM Multimedia, 2001.
- 21
-
L. Magalhaes and R. Kravets.
Transport level mechanisms for bandwidth aggregation on mobile hosts.
In Proceedings of ICNP, Nov. 2001.
- 22
-
M. Mathis, J. Mahdavi, S. Floyd, and A. Romanow.
TCP selective acknowledgement options.
RFC 2018, Oct. 1996.
- 23
-
A. Nakao, L. Peterson, and A. Bavier.
A routing underlay for overlay networks.
In Proceedings of ACM SIGCOMM, Aug. 2003.
- 24
-
T. Nguyen and A. Zakhor.
Path diversity with forward error correction (pdf) system for packet
switched networks.
In Proceedings of IEEE INFOCOM, 2003.
- 25
-
L. Peterson, T. Anderson, D. Culler, and T. Roscoe.
A blueprint for introducing disruptive technology into the
Internet.
Proceedings of ACM HOTNET, Oct. 2002.
- 26
-
D. Rubenstein, J. Kurose, and D. Towsley.
Detecting shared congestion of flows via end-to-end measurement.
Proceedings of ACM SIGMETRICS, June 2000.
- 27
-
S. Savage, A. Collins, and E. Hoffman.
The end-to-end effects of Internet path selection.
Proceedings of ACM SIGCOMM, Aug. 1999.
- 28
-
H. Sivakumar, S. Bailey, and R. L. Grossman.
PSockets: The case for application-level network striping for data
intensive applications using high speed wide area networks.
In Supercomputing, 2000.
- 29
-
A. Snoeren.
Adaptive inverse multiplexing for widearea wireless networks.
In Proc. of IEEE Conference on Global Communications, 1999.
- 30
-
N. Spring, R. Mahajan, and D. Wetherall.
Measuring ISP topologies with rocketfuel.
Proceedings of ACM SIGCOMM, Aug. 2002.
- 31
-
R. Stewart, Q. Xie, K. Morneault, C. Sharp, H. Schwarzbauer, T. Taylor,
I. Rytina, M. Kalla, L. Zhang, and V. Paxson.
Stream control transmission protocol.
In RFC 2960, Oct. 2000.
- 32
-
B. Traw and J. Smith.
Striping within the network subsystem.
In IEEE Network, volume 9, pages 22-32, 1995.
- 33
-
O. Younis and S. Fahmy.
On efficient on-line grouping of flows with shared bottlenecks at
loaded servers.
In Proceedings of IEEE ICNP, Nov. 2002.
- 34
-
Y. Zhang, L. Breslau, V. Paxson, and S. Shenker.
On the characteristics and origins of Internet flow rates.
Proceedings of ACM SIGCOMM, Aug. 2002.
- 35
-
Y. Zhang, N. Duffield, V. Paxson, and S. Shenkar.
On the constancy of Internet path properties.
Proceedings of Internet Measurement Workshop, Nov. 2001.
A Transport Layer Approach for Improving End-to-End Performance and Robustness Using Redundant Paths
This document was generated using the
LaTeX2HTML translator Version 99.1 release (March 30, 1999)
Copyright © 1993, 1994, 1995, 1996,
Nikos Drakos,
Computer Based Learning Unit, University of Leeds.
Copyright © 1997, 1998, 1999,
Ross Moore,
Mathematics Department, Macquarie University, Sydney.
The command line arguments were:
latex2html -split 0 -no_transparent paper-authors.tex
The translation was initiated by Ming Zhang on 2004-05-03
Ming Zhang
2004-05-03
|