| ||||||||||||||||||||||||||||||||||||||||||||||||||||
|
EESR '05 Paper
[EESR '05 Technical Program]
A Rule-based System for Sense-and-Respond Telematics Services jpmunson@us.ibm.com,
lsw@kr.ibm.com, drlee@kr.ibm.com, Abstract We introduce a telematics-oriented event
detection service, and programming framework supporting it, that enables
application developers to more easily develop applications based on the
sense-and-respond model. The system provides a rule-based programming model in
which the application is partitioned in two parts: (1) a set of rules that operate
on low-level position-update events and which, when triggered, produce
high-level, application-defined events; and (2) logic that acts on the
high-level events, which is deployed outside the event detection service, and
typically within the environment of the enterprise deploying the rule.
Programmers represent events of interest in the form of rules, which operate on
both input received from the data acquisition systems as well as data resources
provided and managed by the application programmers. Programmers declare the
inputs the rules require, and the system is responsible for acquiring the
inputs. A high-level programming framework assists programmers in defining the
set of rules, and the actions that respond to events from the rules, and in deploying
the rules to the system. 1 IntroductionIn 2003 the Ministry of Information and Communication
of the In this workshop we introduce one of those projects, the focus of which is to develop technology for supporting telematics-oriented sense-and-respond applications. We present an early result of the project, a prototype service we call the “Telematics Event Detection Service.” The service enables application programmers to define situations of interest in the form of rules, and to deploy these rules to the Telematics Event Detection Service (TEDS). The service receives inputs from vehicles and from other data sources and evaluates the rules over them. When rules “trigger,” notifications are sent to the applications that deployed them. To test basic functions of the service, we created a simple fleet management application around the function known as “geofencing.” The application expresses the geofences as TEDS rules, deploys them to TEDS, and in turn receives notifications when trucks enter and leave the geofence. The application is described in Section 3.1. Geofencing is but the simplest of scenarios that we support with TEDS. We have identified a more complete set of target scenarios that TEDS should support, and then have used these to define the service’s range of functionality. 1.1 Target ScenariosIBM has many discussions with customers and potential customers about applications the customers are interested in. The following set of scenarios, which span a range of application domains, has been distilled from some these discussions. Detecting changes in
vehicle population density. A public-safety organization is interested in
monitoring the deployment of its emergency vehicles to ensure that a vehicle
can be dispatched to any location within a certain time. It would like to be
alerted when the relative values
between local densities change by a certain amount. Track vehicle progress with respect to
schedule. An operator
of a fleet of delivery vehicles wishes to track its vehicles’ progress with respect
to their schedules, and be alerted when a vehicle is more than a certain amount
behind schedule. It may also wish to be alerted when a truck is returning empty
to the warehouse so that it may begin preparing the truck’s next load. Location-based promotions. A marketing company handling
promotions for certain establishments would like to be able to notify consumers
as they approach those establishments with special promotions in effect at that
time. It wants to send the promotions only to those who have accepted the
service and who have been receptive to such promotions in the past, and it
needs to avoid sending the promotion repeatedly. Location-based warnings. A highways department in a fog-prone
area wishes to warn motorists of dangerous fog conditions ahead so that the
motorists will slow down. They need to be able to create such warnings quickly,
and they need be able to distinguish between vehicles moving toward the
conditions and those moving away. Congestion detection. A highways department would like to
have real-time congestion maps of area highways, and to be alerted when
aggregate speeds in particular areas fall below a certain threshold. Monitoring speed of fleet vehicles. An operator of fleet of delivery
vehicles would like to ensure that its drivers obey posted speed limits Enterprise
user defines the set of vehicles to monitor, and creates rule that will
periodically compare their speeds with the speed limits in effect at the
location where the speed was recorded. Detection of excessive speeding. Public safety officials wish to know
when aggregate speeds in a region are excessively high, either because of the
accident rate in the area or because of particular road conditions. Proximity to other mobile entity(ies). A rule is defined that when a certain
number of the friends are within a given distance, causes a message to be sent
to the user. Pervasive gaming. An automobile club wishes to sponsor a combination road rally/treasure
hunt, where members pair up and follow successive clues to a prize, but are
penalized for exceeding speed limits. 1.2 The Value of a Shared InfrastructureWe believe there may be substantial value in a general-purpose, shared, infrastructure that could support any and all of the above services, simultaneously, over a large set of vehicles. Such an infrastructure would enable service providers to reach a broad customer base, without requiring an investment in their own infrastructure. With many services using the infrastructure, no one service must bear the entire load. 2 The Telematics Event Detection ServiceReflecting the structure of sense/respond applications, TEDS offers a rule-based programming model in which the application is partitioned in two parts: (1) a set of rules that operate on low-level position-update events and which, when triggered, produce high-level, application-defined events; and (2) logic that acts on the high-level events, which is deployed outside TEDS, and typically within the environment of the enterprise deploying the rule. Figure 1 illustrates. As shown in Figure 1, programmers represent events of interest in the form of rules, which “trigger” (return true) when the events are detected. Rules operate on both input received from the data acquisition systems as well as data resources provided and managed by the application programmers. An example of an application resource is the geographical polygon describing a warehouse site’s area, which would be used in a rule detecting a truck’s entrance to the site. Rules and rule resources are described in Sections 2.1 and 2.5.
Applications subscribe to a rule to receive notifications of its triggering. The notification received includes any results that may have been computed in the evaluation of the rule. For example, a rule that determines if a subscriber’s position lies within any zones that have a promotion associated with them will, if the position is within any such zones, include the set of zones (via identifiers) in the notification to subscribed applications. Applications may optionally choose to be notified only when the triggering status with respect to a particular subscriber changes, either from false to true, or true to false. For example, an application subscribing to a rule that detects entry to a warehouse site may wish to receive notifications only upon a truck’s entry and exit of the site. 2.1 RulesTEDS rules are essentially condition/action
specifications, and may be as simple as a single Boolean expression, or a more
complicated program with internal state. A rule condition is a logical expression (i.e., evaluates to true or
false) composed of spatial and temporal logical functions joined through AND,
OR, and NOT operators, and scalar functions joined with the usual relational
operators. TEDS offers a number of
built-in functions, which are described below. Rule inputs include an entity’s location (along with speed, heading, and accuracy estimates) received from the positioning technology, and any other input data available from the data acquisition technology. 2.2 Rule FunctionsThe spatial rule functions offered by TEDS operate implicitly on a subscriber position report, and have parameters associated with them that will also be input to the function. The polygonID and pointID parameters are identifiers for polygons and points. Polygons and points are specific kinds of rule resources, support for which is discussed in Section 2.5. Table 1 below defines built-in logical functions of TEDS; Table 2 defines built-in scalar functions. Table 1. Built-in Logical Spatial Functions.
Table 2. Built-in Scalar Functions.
2.3 Rule LanguageIn the course of developing TEDS, we used multiple rule languages. Our first “language” was the construction of rules through building Java object structures of rule objects, much like an expression tree. We considered this to be not sufficiently easy to use. We then developed our own rule language and compiler. In the end, however, we realized that our primary value lay not in the rule language itself, but rather with the functions we provide outside the rule engine, such as rule optimization, application resource management, trigger reporting, and subscriber management (all discussed in later sections). Thus we adopted the approach of embedding existing rule engines within TEDS. This not only enables us to leverage the strengths of the particular rule engine in use, but gives us more flexibility in deployment as well. The rule language we currently use is ABLE [3], an environment for building intelligent agents. ABLE supports different kinds of rule programming, through the variety of inference engines it provides. These include backward chaining, forward chaining, Rete networks, and simple sequential evaluation, among others. Below is an ABLE rule set that triggers when any one a set of trucks is in a no-standing zone. ruleset FMGeofence { By comparison, the same rule with our own (now abandoned) rule language is: memberOf("DeliveryShift1") Despite the obvious loss in succinctness by embedding a “foreign” rule engine such as ABLE, we still feel the advantages in flexibility outweigh the disadvantages. And for more complex rule sets, such as those that maintain local state, the disadvantages become less apparent. We will continue to evaluate other rule
languages and frameworks for use with TEDS, some of which are described in the
section “Related Work.” We are interested in rule frameworks that provide
complementary value, such as strong support for temporal patterns, and that enable
programmers to produce readable, easy-to-understand rule sets. 2.4 SubscriptionsSubscriptions to rules exist independently of the rules themselves. Subscriptions contain a number of parameters, including the rule being subscribed to, the address to send rule-triggering events to, and the report type, which is full, or delta. Full reports consist of the current set of subscriber position reports for which a rule was satisfied; delta reports consist only of the subscriber position reports that resulted in a change in the result of the rule evaluation with respect to a particular subscriber. Other parameters are not described here. 2.5 Rule ResourcesRules typically involve functions that relate data in the subscriber position report to other data. This data may be provided by the application, such as geometries to compare a subscriber’s location to, or a set speed threshold to compare the subscriber’s speed to. Or, the data may be generated by repeated evaluation of the rule. TEDS provides two forms of data store for these purposes. Static Data. TEDS offers a simple data store to provide persistence for the data referred to in rule parameters. The global store is accessed implicitly in the polygonSet and pointSet parameters, and may be accessed explicitly as well (functions not shown). The data store may also be accessed from outside rules, through the TEDS application interface. The data store is not typed, although geometry types for points and polygons are stored differently in order to take advantage of databases with spatial functions and the spatial indexing supporting them. Mobile Data. TEDS also provides a form of persistent data that is associated with particular subscribers. For example, a rule may wish to record a subscriber’s time of entrance to a particular geographical area so that it can determine the total time a subscriber has been in the area. For purposes such as this, TEDS provides a data store associated with each subscriber. 3
TEDS First Prototype
Figure
2 illustrates the architecture of our prototype Telematics Event
Detection Service. The main component is the Telematics Event Detection Engine
(TEDE). Through a TEDE client, an application submits rules and provisions any
resources required by the rule. Rule triggering events are received from the
TEDE asynchronously through an interface the application must provide.
Figure 2. TEDS Demonstration Prototype. As we as yet
have no actual set of vehicles to receive input from, we developed a telemetry
simulator that enables vehicle movements to be simulated. Through a map-based interface
the simulator operator creates paths on the map, giving each segment its own
speed. 3.1
Example: Fleet Manager Application
We developed “Fleet Manager” as an example of an application
that takes advantage of the high-level event detection capabilities of TEDS. It
supports various fleet management scenarios where fleet operators wish to be
notified when vehicles of their fleet enter or leave certain geographical
areas. It enables operators to quickly and easily define the areas and the
vehicles to be monitored. It then transforms this information into a rule before
deploying to TEDS. One of our objectives in developing this application is to explore
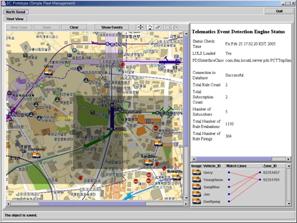
high-level rule creation tools. The Fleet
Manager Application display (Figure 3) shows real-time positions of
vehicles on the map and also represents locations symbolically by showing associations
between vehicles and zones, as shown in the lower right window of Figure 3.
Figure 3. Fleet
Manager application. 3.2
Lessons
from Prototype
In developing the Fleet Manager application for the first TEDS prototype, we realized it had a number of shortcomings. First is that application programming requires a high level of effort to create interfaces to the TEDS system. TEDS provided no support for inserting rules into the system or for receiving events from the system, thereby requiring low-level programming from the application developer. Second, TEDS provided no framework to support the sense-respond programming model. Third, the prototype did not sufficiently support certain important features, such as subscriber groups. These shortcomings are being addressed in the second
prototype. In addition, we are also addressing the fundamental way input data
is acquired, we are enabling rules to operate on a wider range of inputs, we
are enabling the system to acquire input data from a wider range of sources,
and we are also supporting application-provided rule functions. This new
functionality is briefly discussed in the following section. 4
TEDS v2 and
the S&R Framework
To make it
easier to develop applications based on the sense/respond model, we have
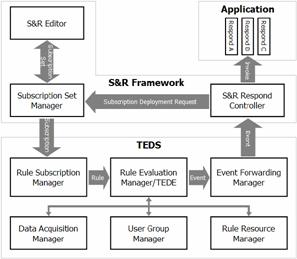
developed a framework providing both develop-time and run-time support. The
framework, called the S&R Framework, relates to TEDS as shown in Figure 4
below. 4.1
S&R
Framework
The S&R
Framework is analogous to the Struts framework for developing Web applications
based on the Model-View-Controller paradigm. With the S&R Editor, the
developer defines the set of rules, and the actions for responding to events
from the rules, that constitute a sense/respond application. The SNR file
produced by the editor, together with the rule files and respond-action classes
referenced by it, are then deployed to the
Subscription Set Manager, which interfaces to TEDS to deploy rules and
subscribe to them, and to the S&R Respond Controller, which receives the
rule-triggered events from TEDS and invokes the related respond classes.
Figure 4. TEDS
and S&R Framework 4.2 Extended Rule InputsThe new TEDS architecture enables rule programmers to define rules that operate over a range of inputs, beyond the location input supported by the first prototype. Rule inputs may include any sensor data received from mobile entities such as fleet vehicles, as well as business-related data such as “pickup needed” signals. Acquisition of these inputs is the responsibility of the
Data Acquisition Manager, shown in Figure
4, Given
the list of inputs a rule requires, and the rule’s specified evaluation
frequency, the DAM is responsible for acquiring the inputs at the rate
specified and supplying them to the Rule Evaluation Manager. 5 Related WorkAs a framework for programming sense-and-respond applications, TEDS is related to a broad array of work in real-time monitoring, event-driven systems, context-aware computing, and active databases. However, TEDS has a focus on those situations involved in telematics. Furthermore, it does not address applications where extended and complex patterns of events are of interest. Space does not permit a full discussion of related technologies, but we briefly note those that are most closely related. Chandy et al [3] describe an abstract programming model for dynamic applications that corresponds closely with the programming model of TEDS. The iSpheres Halo [9] platform offers a complete system for sense-and-respond programming. It does not, however, offer specific support for spatial events. Some work has addressed the specific application of location-based notification. Chen et al [5] describe a publish/subscribe system for spatial triggering, focusing on efficient matching algorithms. Munson and Gupta [10] describe another spatial triggering system, focusing on an architecture for scalable implementation of this system over millions of users. This work is a predecessor of the system described here. A set of spatial predicates and means of composing them are offered by Bauer and Rothermel [1] and Nelson [11] presents a similar a set of spatial predicates, and extends this with some temporal operators. Stronger support for event patterns is offered by iQL [6]. iQL’s functions and operators apply to generic numeric and textual data, and it does not offer specific support for spatial data or location input. Houdini [8] is a rule language and framework used for user-preferences policy management for telecommunication services. As such, it addresses a different set of applications than TEDS, and does not address spatial events. Amit [1] is a rule-based framework for detecting situations over potentially long-running event streams. Like Houdini, it could also serve as a base rule engine for TEDS. 6 Conclusions and Future WorkWe have described the Telematics Event Detection Service, an infrastructure that we believe can enable a wide range of event-driven telematics services. The rule-based programming model of TEDS is a key feature that we plan to exploit further to address scalability. We believe it will enable the units of computation to be both replicated widely to make efficient use of resources, and pushed out close to the sensors to reduce communication needs in the wide-area network. We have also described our initial effort at developing a high-level programming framework around the sense-and-respond application model. We believe that frameworks such as this are an important element in enabling programmers to exploit this model. We hope to extend the S&R Framework with high-level support for the development of rules themselves. A primary goal for the future is to address the issue of scalability. We believe the flexibility of our service may make it attractive for service providers with large subscriber bases, such as large telematics service providers or wireless carriers. It would enable them to offer a wide range of services to their subscribers. For that to be feasible, however, our service must be scalable to a subscriber base numbering in the millions, and the number of services numbering in the hundreds or thousands. The resulting load on the service could be millions of rule evaluations per second. We must therefore have an architecture that can scale to this load, not only in the computational load of rule evaluation, but in the data transmission load involved in getting inputs to the rule engines. We plan to address this in a third phase of the project. 7 References1. Adi, A., Etzion, O. Amit – The Situation
Manager. The VLDB Journal, Springer-Verlag, 2. Bauer, M., Rothermel, K. Towards the Observation of Spatial Events in Distributed Location-Aware Systems. In Proceedings of the 22nd International Conference on Distributed Computting Systems Workshops, 2002. 3. Bigus, J. P., Schlosnagle, D. A., Pilgrim, J. R., Mills, W. N. III, Diao, Y. ABLE: A Toolkit for Building Multiagent Autonomic Systems. IBM Systems Journal, Vol. 41, No. 3, 2002. 4. Chandy, K.M., Aydemir, B.E., Karpilovsky, E.M., Zimmerman, D.M. Event-Driven Architectures for Distributed Crisis Management. Presented at the 15th IASTED International Conference on Parallel and Distributed Computing and Systems, November 2003. 6.
7. Federal Communications Commission. Enhanced 911. http://www.fcc.gov/911/enhanced/ 8.
9. iSpheres Corporation. Halo™. http://www/ispheres.com. 10. Munson,
J.P., Gupta, V.K. Location-Based Notification as a General-Purpose. In
Proceedings of the Workshop on 11. Nelson,
G.J., Context-Aware and Location Systems. Ph.D. Thesis, | |||||||||||||||||||||||||||||||||||||||||||||||||
|
This paper was originally published in the
Proceedings of the Workshop on End-to-End, Sense-and-Respond Systems, Applications, and Services,
June 5, 2005 Seattle, WA Last changed: 1 June 2005 aw |
|