
2007 USENIX Annual Technical Conference
Pp. 1–14 of the Proceedings
Energy Management for Hypervisor-Based Virtual Machines
Jan Stoess, Christian Lang, Frank Bellosa
System Architecture Group, University of Karlsruhe, Germany
Abstract
Current approaches to power management are based on operating systems
with full knowledge of and full control over the underlying hardware;
the distributed nature of multi-layered virtual machine environments
renders such approaches insufficient. In this paper, we present a
novel framework for energy management in modular, multi-layered
operating system structures. The framework provides a unified model to
partition and distribute energy, and mechanisms for energy-aware
resource accounting and allocation. As a key property, the framework
explicitly takes the recursive energy consumption into account, which
is spent, e.g., in the virtualization layer or subsequent driver
components.
Our prototypical implementation targets hypervisor-based virtual
machine systems and comprises two components: a host-level subsystem,
which controls machine-wide energy constraints and enforces them among
all guest OSes and service components, and, complementary, an
energy-aware guest operating system, capable of fine-grained
application-specific energy management. Guest level energy management
thereby relies on effective virtualization of physical energy effects
provided by the virtual machine monitor. Experiments with CPU and disk
devices and an external data acquisition system demonstrate that our
framework accurately controls and stipulates the power consumption of
individual hardware devices, both for energy-aware and energy-unaware
guest operating systems.
Over the past few years, virtualization technology has regained
considerable attention in the design of computer systems. Virtual
machines (VMs) establish a development path for incorporating new
functionality - server consolidation, transparent migration, secure
computing, to name a few - into a system that still retains
compatibility to existing operating systems (OSes) and
applications. At the very same time, the ever increasing power density
and dissipation of modern servers has turned energy management into a
key concern in the design of OSes. Research has proposed several
approaches to OS directed control over a computer's energy
consumption, including user- and service-centric management
schemes. However, most current approaches to energy management are
developed for standard, legacy OSes with a monolithic kernel. A
monolithic kernel has full control over all hardware devices and their
modes of operation; it can directly regulate device activity or energy
consumption to meet thermal or energy constraints. A monolithic kernel
also controls the whole execution flow in the system. It can easily
track the power consumption at the level of individual applications
and leverage its application-specific knowledge during device
allocation to achieve dynamic and comprehensive energy management.
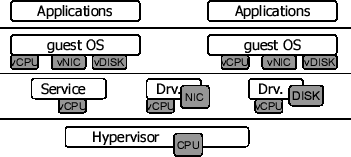
Modern VM environments, in contrast, consist of a distributed and
multi-layered software stack including a hypervisor, multiple VMs and
guest OSes, device driver modules, and other service infrastructure
(Figure 1). In such an environment, direct and
centralized energy management is unfeasible, as device control and
accounting information are distributed across the whole system.
At the lowest-level of the virtual environment, the privileged
hypervisor and host driver modules have direct control over hardware
devices and their energy consumption. By inspecting internal data
structures, they can obtain coarse-grained per-VM information on how
energy is spent on the hardware. However, the host level does not
possess any knowledge of the energy consumption of individual
applications. Moreover, with the ongoing trend to restrict the
hypervisor's support to a minimal set of hardware and to perform most
of the device control in unprivileged driver domains
[8,15], hypervisor and
driver modules each have direct control over a small set of devices;
but they are oblivious to the ones not managed by themselves.
The guest OSes, in turn, have intrinsic knowledge of their own
applications. However, guest OSes operate on deprivileged virtualized
devices, without direct access to the physical hardware, and are
unaware that the hardware may be shared with other VMs. Guest OSes are
also unaware of the side-effects on power consumption caused by
the virtual device logic: since virtualization is transparent, the
``hidden'', or recursive power consumption, which the virtualization
layer itself causes when requiring the CPU or other resources simply
vanishes unaccounted in the software stack. Depending on the
complexity of the interposition, resource requirements can be
substantial: a recent study shows that the virtualization layer
requires a considerable amount of CPU processing time for I/O
virtualization [5].
The whole situation is even worsened by the non-partitionability of
some of the physical effects of power dissipation: the temperature of
a power consuming device, for example, cannot simply be partitioned
among different VMs in a way that each one gets alloted its own share
on the temperature. Beyond the lack of comprehensive control over and
knowledge of the power consumption in the system, we can thus identify
the lack of a model to comprehensively express physical effects of
energy consumption in distributed OS environments.
Figure 1:
Increasing number of layers and components in today's virtualization-based OSes.
 |
To summarize, current power management schemes are limited to legacy
OSes and unsuitable for VM environments. Current virtualization
solutions disregard most energy-related aspects of the hardware
platform; they usually virtualize a set of standard hardware devices
only, without any special power management capabilities or support for
energy management. Up to now, power management for VMs is limited to
the capabilities of the host OS in hosted solutions and mostly
dispelled from the server-oriented hypervisor solutions.
Observing these problems, we present a novel framework for managing
energy in distributed, multi-layered OS environments, as they are
common in today's computer systems. Our framework makes three
contributions. The first contribution is a model for partitioning and
distributing energy effects; our model solely relies on the notion of
energy as the base abstraction. Energy quantifies the physical effects
of power consumption in a distributable way and can be partitioned and
translated from a global, system-wide notion into a local, component-
or user-specific one. The second contribution is a distributed energy
accounting approach, which accurately tracks back the energy spent in
the system to originating activities. In particular, the presented
approach incorporates both the direct and the side-effectual energy
consumption spent in the virtualization layers or subsequent driver
components. As the third contribution, our framework exposes all
resource allocation mechanisms from drivers and other resource
managers to the respective energy management subsystems. Exposed
allocation enables dynamic and remote regulation of energy consumption
in a way that the overall consumption matches the desired constraints.
We have implemented a prototype that targets hypervisor-based
systems. We argue that virtual server environments benefit from energy
management within and across VMs; hence the prototype employs
management software both at host-level and at guest-level. A
host-level management subsystem enforces system-wide energy
constraints among all guest OSes and driver or service components. It
accounts direct and hidden power consumption of VMs and regulates the
allocation of physical devices to ensure that each VM does not consume
more than a given power allotment. Naturally, the host-level subsystem
performs independent of the guest operating system; on the downside,
it operates at low level and in coarse-grained manner. To benefit from
fine-grained, application-level knowledge, we have complemented the
host-level part with an optional energy-aware guest OS, which
redistributes the VM-wide power allotments among its own, subordinate
applications. In analogy to the host-level, where physical devices are
allocated to VMs, the guest OS regulates the allocation of virtual
devices to ensure that its applications do not spend more energy than
their alloted budget.
Our experiments with CPU and disk devices demonstrate that the
prototype effectively accounts and regulates the power consumption of
individual physical and virtual devices, both for energy-aware and
energy-unaware guest OSes.
The rest of the paper is structured as follows: In Section
2, we present a generic model to energy management in
distributed, multi-layered OS environments. We then detail our
prototypical implementation for hypervisor-based systems in Section
3. We present experiments and results in Section
4. We then discuss related approaches in Section
5, and finally draw a conclusion and outline future
work in Section 6.
2 Distributed Energy Management
The following section presents the design principles we consider to be
essential for distributed energy management. We begin with formulating
the goals of our work. We then describe the unified energy model that
serves as a foundation for the rest of our approach. We finally
describe the overall structure of our distributed energy management
framework.
The increasing number of layers, components, and subsystems in modern
OS structures demands for a distributed approach to control the energy
spent in the system. The approach must perform effectively across
protection boundaries, and it must comprise different types of
activities, software abstractions, and hardware
resources. Furthermore, the approach must be flexible enough to
support diversity in energy management paradigms. The desire to
control power and energy effects of a computer system stems from a
variety of objectives: Failure rates typically increase with the
temperature of a computer node or device; reliability requirements or
limited cooling capacities thus directly translate into temperature constraints, which are to be obeyed for the hardware to
operate correctly. Specific power limits, in turn, are typically
imposed by battery or backup generators, or by contracts with the
power supplier. Controlling power consumption on a per-user base
finally enables accountable computing, where customers are billed for
the energy consumed by their applications, but also receive a
guaranteed level or quality of service. However, not only the
objectives for power management are diverse; there also exists a
variety of algorithms to achieve those objectives. Some of them use
real temperature sensors, whereas others rely on estimation
models[ 12, 3]. To reach their
goals, the algorithms employ different mechanisms, like throttling
resource usage, request batching, or migrating of execution
[ 4, 17, 9]. Hence,
a valid solution must be flexible and extensible enough to suit a
diversity of goals and algorithms.
To encompass the diverse demands on energy management, we propose to
use the notion of energy as the base abstraction in our system, an
approach which is similar to the currentcy model in
[ 28]. The key advantage of using energy is that it
quantifies power consumption in a partitionable way - unlike other
physical effects of power consumption such as the temperature of a
device. Such effects can easily be expressed as energy constraints, by
means of a thermal model [ 3, 12]. The energy constraints can then be partitioned from
global notions into local, component-wise ones. Energy constraints
also serve as a coherent base metric to unify and integrate management
schemes for different hardware devices.
Current approaches to OS power management are tailored
to single building-block OS design, where one kernel
instance manages all software and hardware resources. We instead model
the OS as a set of components, each responsible for
controlling a hardware device, exporting a service library, or
providing a software resource for use by applications.
Our design is guided by the familiar concept of separating policy and
mechanism. We formulate the procedure of energy management as a simple
feedback loop: the first step is to determine the current power
consumption and to account it to the originating activities. The next
step is to analyze the accounting data and to make a decision based on
a given policy or goal. The final step is to respond with allocation
or de-allocation of energy consuming resources to the activities, with
the goal to align the energy consumption with the desired constraints.
We observe that mainly the second step is associated with policy,
whereas the two other steps are mechanisms, bound to the respective
providers of the resource, which we hence call resource
drivers. We thus model the second step as an energy manager
module, which may, but need not reside in a separate software
component or protection domain. Multiple such managers may exist
concurrently the system, at different position in the hierarchy and
with different scopes.
Figure 2:
Distributed energy management. Energy managers may reside in
different components or protection domains. Resource drivers consume
resources themselves, for which the energy is accounted back to the
original clients.
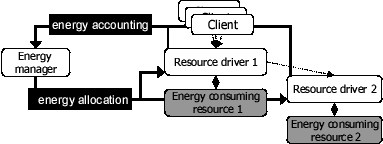 |
Each energy manager is responsible for a set of subordinate
resources and their energy consumption. Since the system is
distributed, the resource manager cannot assume direct control or
access over the resource; it requires remote mechanisms to account and
allocate the energy (see Figure 2). Hence, by
separating policy from mechanism, we translate our general goal of
distributed energy management into the two specific aspects of distributed energy accounting and dynamic, exposed resource
allocation; these are the subject of the following paragraphs.
Estimating and accounting the energy of a physical device usually
requires detailed knowledge of the particular device. Our framework
therefore requires each driver of an energy consuming device or
resource to be capable of determining (or estimating) the energy
consumption of its resources. Likewise, it must be capable to account
the consumption to its consumers. If the energy management software
resides outside the resource driver, it must propagate the accounting
information to the manager.
Since the framework does not assume a single kernel comprising all
resource subsystems, it has to track energy consumptions across module
boundaries. In particular, it must incorporate the recursive energy
consumption: that is, the driver of a given resource such as a disk
typically requires other resources, like the CPU, in order to provide
its service successfully. Depending on the complexity, such recursive
resource consumption may be substantial; consider, as examples, a disk
driver that transparently encrypts and decrypts its client requests,
or a driver that forwards client requests to a network attached
storage server via a network interface card. Recursive resource
consumption requires energy, which must be accounted back to the
clients. In our example, it would be the responsibility of disk driver
to calculate its clients' shares of the disk and on its own CPU
energy. To determine its CPU energy, the driver must recursively query
the driver of the CPU resource, which is the hypervisor in our case.
To regulate
the energy spent on a device or resource, each driver must expose its
allocation mechanisms to energy manager subsystems. The manager
leverages the allocation mechanisms to ensure that energy consumption
matches the desired constraints. Allocation mechanisms relevant for
energy management can be roughly distinguished into hardware and
software mechanisms. Hardware-provided power saving features typically
provide a means to change power consumption of a device, by offering
several modes of operation with different efficiency and energy
coefficients (e.g., halt cycles or different active and sleep
modes). The ultimate goal is to achieve the optimal level of
efficiency with respect to the current resource utilization, and to
reduce the wasted power consumption. Software-based mechanisms, in
turn, rely on the assumption that energy consumption depends on the
level of utilization, which is ultimately dictated by the number of
device requests. The rate of served requests can thus be adapted by
software to control the power consumption.
3 A Prototype for Hypervisor-Based Systems
Based on the design principles presented above, we have developed a
distributed, two-level energy management framework for
hypervisor-based VM systems. The prototype employs management software
both at host-level and at guest-level. It currently supports
management of two main energy consumers, CPU and disk. CPU services
are directly provided by the hypervisor, while the disk is managed by
a special device driver VM. In the following section, we first
describe the basic architecture of our prototype. We then present the
energy model for CPU and disk devices. We then describe the host-level
part, and finally the guest-level part of our energy management
prototype.
Our prototype uses the L4 micro-kernel as the privileged hypervisor,
and para-virtualized Linux kernel instances running on top of it. L4
provides core abstractions for user level resource management: virtual
processors (kernel threads), synchronous communication, and mechanisms
to recursively construct virtual address spaces. I/O devices are
managed at user-level; L4 only deals with exposing interrupts and
providing mechanisms to protect device memory.
The guest OSes are adaptions of the Linux 2.6 kernel,
modified to run on top of L4 instead of on bare hardware
[11]. For managing guest OS instances,
the prototype includes a user-level VM monitor (VMM), which provides
the virtualization service based on L4's core abstractions. To provide
user-level device driver functionality, the framework dedicates a
special device driver VM to each device, which exports a virtual
device interface to client VMs and multiplexes virtual device requests
onto the physical device. The driver VMs are Linux guest OS instances
themselves, which encapsulate and reuse standard Linux device driver
logic for hardware control [15].
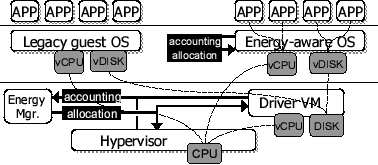
Figure 3:
Prototype architecture. The host-level subsystem controls
system-wide energy constraints and enforces them among all guests. A
complementary energy-aware guest OS is capable of performing its own,
application-specific energy management.
 |
The prototype features a host-level energy manager module responsible
for controlling the energy consumption of VMs on CPUs and disk drives.
The energy manager periodically obtains the per-VM CPU and disk energy
consumption from the hypervisor and driver VM, and matches them
against a given power limit. To bring both in line, it responds by
invoking the exposed throttling mechanisms for the CPU and disk
devices. Our energy-aware guest OS is a modified version of L4Linux
that implements the resource container abstraction
[1] for resource management and scheduling. We
enhanced the resource containers to support energy management of
virtual CPUs and disks. Since the energy-aware guest OS requires
virtualization of the energy effects of CPU and disk, the hypervisor
and driver VM propagate their accounting records to the user-level VM
monitor. The monitor then creates, for each VM, a local view on the
current energy consumption, and thereby enables the guest to pursue
its own energy-aware resource management. Note, that our energy-aware
guest OS is an optional part of the prototype: it provides the benefit
of fine-grained energy management for Linux-compatible
applications. For all energy-unaware guests, our prototype resorts to
the coarser-grained host-level management, which achieves the
constraints regardless whether the guest-level subsystem is present or
not.
Figure 3 gives a schematic overview of the
basic architecture. Our prototype currently runs on IA-32
microprocessors. Certain parts, like the device driver VMs, are
presently limited to single processor systems; we are working on
multi-processor support and will integrate it into future versions.
In the following section, we present the device energy models that
serve as a base for CPU and disk accounting. We generally break down
the energy consumption into access and idle
consumption. Access consumption consists of the energy spent when
using the device. This portion of the energy consumption can be
reduced by controlling device allocation, e.g., in terms of the client
request rate. Idle consumption, in turn, is the minimum power
consumption of the device, which it needs even when it does not serve
requests. Many current microprocessors support multiple sleep and
active modes, e.g., via frequency scaling or clock gating. A similar
technology, though not yet available on current standard servers, can
be found in multi-speed disks, which allow lowering the spinning speed
during phases of low disk utilization
[ 10]. To retain fairness, we propose to decouple
the power state of a multi-speed device from the accounting of its
idle costs. Clients that do not use the device are charged for the
lowest active power state. Higher idle consumptions are only charged
to the clients are actively using the device.
Our prototype leverages previous work
[ 3, 13] and bases
CPU energy estimation on the rich set of performance counters featured
by modern IA-32 microprocessors. For each performance counter event,
the approach assigns a weight representing its contribution to the
processor energy. The weights are the result of a calibration
procedure that employs test applications with constant and known power
consumptions and physical instrumentation of the microprocessors
[ 3]. Previous experiments have demonstrated that this approach is fairly
accurate for integer applications, with an error of at most 10
percent. To obtain the processor energy consumption during a certain
period of time, e.g., during execution of a VM, the prototype sums up
the number of events that occurred during that period, multiplied with
their weights. The time stamp counter, which counts clock cycles
regardless whether the processor is halted or not, yields an accurate
estimation of the CPU's idle consumption.
Our disk energy model differs from the CPU model in that it uses a
time-based approach rather than event sampling. Instead of attributing
energy consumption to events, we attribute power consumption to
different device states, and calculate the time the device requires to
transfer requests of a given size. There is no conceptual limit to the
number of power states. However, we consider suspending the disk to be
an unrealistic approach for hypervisor systems; for lack of
availability, we do not consider multi-speed disks as well. We thus
distinguish two different power states: active and idle.
To determine the transfer time of a request - which is equal to the
time the device must remain in active state to handle it -, we divide
the size of the request by the disk's transfer rate in bytes per
second. We calculate the disk transfer rate dynamically, in intervals
of 50 requests. Although we ignore several parameters that affect the
energy consumption of requests, (e.g., seek time or the rotational
delays), our evaluation shows that our simple approach is sufficiently
accurate1.
Our framework requires each driver of a physical device to determine
the device's energy consumption and to account the consumption to the
client VMs. The accounting infrastructure uses the device energy model
presented above: Access consumption is charged directly to each
request, after the request has been fulfilled. The idle consumption,
in turn, cannot be attributed to specific requests; rather, it is
alloted to all client VMs in proportion to their respective
utilization. For use by the energy manager and others, the
driver grants access to its accounting records via shared memory and
updates the records regularly.
In addition to providing accounting records, each resource driver
exposes its allocation mechanisms to energy managers and other
resource management subsystems. At host-level, our framework currently
supports two allocation mechanisms: CPU throttling and disk request
shaping. CPU throttling can be considered as a combined
software-hardware approach, which throttles activities in software and
spends the unused time in halt cycles. Our disk request shaping
algorithm is implemented in software.
In the remainder of this section, we first explain how we implemented
runtime energy accounting and allocation for CPU and the disk
devices. We then detail how the these mechanisms enable our energy
management software module to keep the VMs' energy consumption within
constrained limits.
3.3.1 CPU Energy Accounting
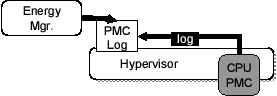
To accurately account the CPU energy consumption, we trace the
performance counter events within the hypervisor and propagate them to
the user-space energy manager module. Our approach extends our
previous work to support resource management via event logging
[20] to the context of energy management. The
tracing mechanism instruments context switches between VMs within the
hypervisor; at each switch, it records the current values of the
performance counters into an in-memory log buffer. The hypervisor
memory-maps the buffers into the address space of the energy
manager. The energy manager periodically analyzes the log buffer and
calculates the energy consumption of each VM (Figure
4).
By design, our tracing mechanism is asynchronous and separates
performance counter accumulation from their analysis and the
derivation of the energy consumption. It is up to the energy manager
to perform the analysis often enough to ensure timeliness and
accuracy. Since the performance counter logs are relatively small, we
consider this to be easy to fulfil; our experience shows that the
performance counter records cover a few hundred or thousand bytes, if
the periodical analysis is performed about every 20th millisecond.
Figure 4:
The hypervisor collects performance counter traces and
propagates the trace logs to user-space energy
managers.
 |
The main advantage of using tracing for recording CPU performance
counters is that it separates policy from mechanism. The hypervisor is
extended by a simple and cheap mechanism to record performance counter
events. All aspects relevant to energy estimation and policy are kept
outside the hypervisor, within the energy manager module. A further
advantage of in-memory performance counter records is that they can
easily be shared - propagating them to other guest-level energy
accountants is a simple matter of leveraging the hypervisor's
memory-management primitives.
In the current prototype, the energy manager is invoked every
20 ms to check the performance counter logs for new records. The log
records contain the performance counter values relevant for energy
accounting, sampled at each context switch together with an identifier
of the VM that was active on the CPU. For each period between
subsequent context switches, the manager calculates the energy
consumption during that period, by multiplying the advance of the
performance counters with their weights. Rather than charging the
complete energy consumption to the active VM, the energy manager
subtracts the idle cost and splits it between all VMs running on that
processor. The time stamp counter, which is included in the recorded
performance counters, provides an accurate estimation of the
processor's idle cost. Thus the energy estimation looks as follows:
/* per-VM idle energy based on TSC advance (pmc0) */
for (id = 0; id < max_vms; id++)
vm[id].cpu_idle += weight[0] * pmc[0] / max_vms;
/* calculate and charge access energy (pmc1..pmc8) */
for (p=1; p < 8; p++)
vm[cur_id].cpu_access += weight[p] * pmc[p];
To virtualize physical disks drives, our framework reuses legacy Linux
disk driver code by executing it inside VMs. The driver functionality
is exported via a translation module that mediates requests between
the device driver and external client VMs. The translation module runs
in the same address space as the device driver and handles all
requests sent to and from the driver. It receives disk requests from
other VMs, translates them to basic Linux block I/O requests, and
passes them to the original device driver. When the device driver has
finalized the request, the module again translates the result and
returns it to the client VM.
The translation module has access to all information relevant for
accounting the energy dissipated by the associated disk device. We
implemented accounting completely in this translation module, without
changing the original device driver. The module estimates the energy
consumption of the disk using the energy model presented above. When
the device driver has completed a request, the translation module
estimates the energy consumption of the request, depending on the
number of transferred bytes:
/* estimate transfer cost for size bytes */
vm[cur_id].disk_access += (size / transfer_rate)
* (active_disk_power - idle_disk_power);
Because the idle consumption is independent of the requests, it does
not have to be calculated for each request. However, the driver must
recalculate it periodically, to provide the energy manager with
up-to-date accounting records power consumption of the disk. For that
purpose, the driver invokes the following procedure periodically every
50 ms:
/* estimate idle energy since last time */
idle_disk_energy = idle_disk_power * (now - last)
/ max_client_vms;
for (id = 0; v < max_client_vms; id++)
vm[id].disk_idle += idle_disk_energy;
3.3.3 Recursive Energy Accounting
Fulfilling a virtual device request issued by a guest VM may involve
interacting with several different physical devices. Thus, with
respect to host-level energy accounting, it is not sufficient to focus
on single physical devices; rather, accounting must incorporate the
energy spent recursively in the virtualization layer or subsequent
service.
We therefore perform a recursive, request-based accounting of the
energy spent in the system, according to the design principles
presented in Section 2. In particular, each driver of
a physical device determines the energy spent for fulfilling a given
request and passes the cost information back to its client. If the
driver requires other devices to fulfill a request, it charges the
additional energy to its clients as well. Since idle consumption of a
device cannot be attributed directly to requests, each driver
additionally provides an ``electricity meter'' for each client. It
indicates the client's share in the total energy consumption of the
device, including the cost already charged with the requests. A client
can query the meter each time it determines the energy consumption of
its respective clients.
As a result, recursive accounting yields a distributed matrix of
virtual-to-physical transactions, consisting of the idle and the
active energy consumption of each physical device required to provide
a given virtual device (see Figure 5). Each
device driver is responsible for reporting its own vector of the
physical device energy it consumes to provide its virtual device
abstraction.
Figure 5:
Recursive accounting of disk energy consumption; for each
client VM and physical device, the driver reports idle and active
energy to the energy manager. The driver is assumed to consume 8W CPU
idle power, which is apportioned equally to the two clients.
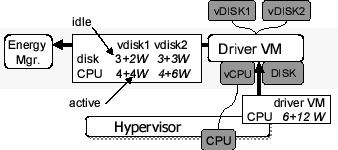 |
Since our framework currently supports CPU and disk energy accounting,
the only case where recursive accounting is required occurs in the
virtual disk driver located in the driver VM. The cost for the
virtualized disk consists of the energy consumed by the disk and the
energy consumed by the CPU while processing the requests. Hence, our
disk driver also determines the processing energy for each request
in addition to the disk energy as presented above.
As with disk energy accounting, we instrumented the translation module
in the disk driver VM to determine the active and idle CPU energy per
client VM. The Linux disk driver combines requests to get better
performance and delays part of the processing in work-queues and
tasklets. When determining the active CPU energy, it would be
infeasible to track the CPU energy consumption of each individual
request. Instead, we retrieve the CPU energy consumption at times and
apportion it between the requests. Since the driver runs in a VM, it
relies on the energy virtualization capabilities of our framework to
retrieve a local view on the CPU energy consumption (details on energy
virtualization are presented in Section 3.4).
The Linux kernel constantly consumes a certain amount of energy, even
if it does not handle disk requests. According to our energy model, we
do not charge idle consumption with the request. To be able to
distinguish the idle driver consumption from the access consumption,
we approximate the idle consumption of the Linux kernel when no client
VM uses the disk.
To account active CPU consumption, we assume constant values per
request, and predict the energy consumption of future requests based
on the past. Every 50th request, we estimate the driver's CPU energy
consumption by means of virtualized performance monitoring counters
and adjust the expected cost for the next 50 requests. The following
code illustrates how we calculate the cost per request. In the code
fragment, the static variable unaccounted_cpu_energy
keeps track of the deviation between the consumed energy and the
energy consumption already charged to the clients. The function
get_cpu_energy() returns the guest-local view of the
current idle and active CPU energy since the last query.
/* subtract idle CPU consumption of driver VM */
unaccounted_cpu_energy -= drv_idle_cpu_power
* (now - last);
/* calculate cost per request */
num_req = 50;
unaccounted_cpu_energy += get_cpu_energy();
unaccounted_cpu_energy -= cpu_req_energy * num_req;
cpu_req_energy = unaccounted_cpu_energy / num_req;
To regulate the CPU energy consumption of individual machines, our
hypervisor provides a mechanism to throttle the CPU allocation at
runtime, from user-level. The hypervisor employs a stride scheduling
algorithm [23,21] that allots
proportional CPU shares to virtual processors; it exposes control over
the shares to selected, privileged user-level components. The
host-level energy manager dynamically throttles a virtual CPU's energy
consumption by adjusting the alloted share accordingly. A key feature
of stride scheduling is that it does not impose fixed upper bounds on
CPU utilization: the shares have only relative meaning, and if one
virtual processor does not fully utilize its share, the scheduler
allows other, competing virtual processors to steal the unused
remainder. An obvious consequence of dynamic upper bounds is that
energy consumption will not be constrained either, at least not with a
straight-forward implementation of stride scheduling. We solved this
problem by creating a distinct and privileged idle virtual
processor per CPU, which is guaranteed to spend all alloted time with
issuing halt instructions (we modified our hypervisor to translate the
idle processor's virtual halt instructions directly into real
ones). Initially, each idle processor is alloted only a minuscule CPU
share, thus all other virtual processors will be favored on the CPU if
they require it. However, to constrain energy consumption, the energy
manager will decrease the CPU shares of those virtual processors, and
idle virtual processor will directly translate the remaining CPU time
into halt cycles. Our approach guarantees that energy limits are
effectively imposed; but it still preserves the advantageous processor
stealing behavior for all other virtual processors. It also keeps the
energy-policy out of the hypervisor and allows, for instance, to
improve the scheduling policy with little effort, or to exchange it
with a more throughput-oriented one for those environments where CPU
energy management is not required.
To reduce disk power consumption, we pursue a similar approach and
enable a energy manager to throttle disk requests of individual
VMs. Throttling the request rate not only reduces the direct access
consumption of the disk; it also reduces the recursive CPU consumption
which the disk driver requires to process, recompute, and issue
requests. We implemented the algorithm as follows: the disk driver
processes a client VM's disk requests only to a specific request
budget, and it delays all pending requests. The driver periodically
refreshes the budgets according to the specific throttling level set
by the energy manager. The algorithm is illustrated by the following
code snippet:
void process_io(client_t *client)
{
ring = &client->ring;
for (i=0; i < client->budget; i++)
{
desc = &client->desc[ ring->start ];
ring->start = (ring->start+1) % ring->cnt;
initiate_io(conn, desc, ring);
}
}
Our host-level energy manager manager relies on the accounting and
allocation mechanisms described previously, and implements a simple
policy that enforces given device power limits on a per-VM base. The
manager consists of an initialization procedure and a subsequent
feedback loop. During initialization, the manager determines a power
limit for each VM and device type, which may not be exceeded during
runtime. The CPU power limit reflects the active CPU power a VM is
allowed to consume directly. The disk power limit reflects the overall
active power consumption the disk driver VM is allowed to spend in
servicing a particular VM, including the CPU energy spent for
processing (Nevertheless, the driver's CPU and disk energy are
accounted separately, as depicted by the matrix in Figure
5). Finding an optimal policy for allotment
of power budgets is not the focus of our work; at present, the limits
are set to static values.
The feedback loop is invoked periodically, every 100 ms for the CPU
and every 200 ms for the disk. It first obtains the CPU and disk
energy consumption of the past interval by querying the accounting
infrastructure. The current consumptions are used to predict future
consumptions. For each device, the manager compares the VM's current
energy consumption with the desired power limit multiplied with the
time between subsequent invocations. If they do not match for a given
VM, the manager regulates the device consumption by recomputing and
propagating the CPU strides and disk throttle factors respectively. To
compute a new CPU stride, the manager adds or subtracts a constant
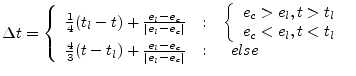
offset from the current value. When computing the disk throttle
factor, the manager takes the past period into consideration, and
calculates the offset  according to the following
formula. In this formula, according to the following
formula. In this formula,  denotes the energy consumed, denotes the energy consumed,  the energy limit per period, and
the energy limit per period, and  and and  and denote the
present and past disk throttle factors; viable throttle factors range
from 0 to a few thousand: and denote the
present and past disk throttle factors; viable throttle factors range
from 0 to a few thousand:
3.4 Virtualized Energy
To enable application-specific energy management, our framework
supports accounting and control not only for physical but also of
virtual devices. In fact, the advantage of having guest-level support
for energy accounting is actually twofold: first, it enables guest
resource management subsystems to leverage their application-specific
knowledge; second, it allows drivers and other components to
recursively determine the energy for their services.
The main difference between a virtual device and other software
services and abstractions lies in its interface: a virtual device
closely resembles its physical counterpart. Unfortunately, most
current hardware devices offer no direct way to query energy or power
consumption. The most common approach to determine the energy
consumption is to estimate it based on certain device characteristics,
which are assumed to correlate with the power or energy consumption of
the device. By emulating the according behavior for the virtual
devices, we support energy estimation in the guest without major
modifications to the guest's energy accounting. Our ultimate goal is
to enable the guest to use the same driver for virtual and for real
hardware. In the remainder of this section, we first describe how we
support energy accounting of virtual CPU and disk. We then present the
implementation of our energy-aware guest OS, which provides the
support for application-specific energy management.
For virtualization of physical energy effects of the CPU, we provide a
virtual performance counter model that gives guest OSes a
private view of their current energy consumption. The virtual model
relies on the tracing of performance counters within the hypervisor,
which we presented in Section 3.3.1. As
mentioned, not only an energy-aware guest OS requires
the virtual performance counters; the specialized device driver VM
uses them as well, when recursively determining the CPU energy for its
disk services.
Figure 6:
Virtualizing performance counters via
hypervisor-collected performance counter traces.
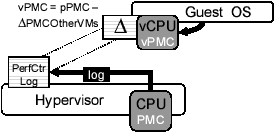 |
Like their physical counterparts, each virtual CPU has a set of
virtual performance counters, which factor out the events of other,
simultaneously running VMs. If a guest OS determines the
current value of a virtual performance counter, an emulation routine
in the in-place monitor obtains the current hardware performance
counter and subtracts all advances of the performance counters that
occurred when other VMs were running. The hardware performance
counters are made read-accessible to user-level software by setting a
control register flag in the physical processors. The advances of
other VMs are derived from the performance counter log buffers. To be
accessible by the in-place VMM, the log buffers are mapped read-only
into the address space of the guest OS.
In contrast to the CPU, the disk energy estimation schemes does not
rely on on-line measurements of sensors or counters; rather, it is
based on known parameters such as the disk's power consumption in idle
and active mode and the time it remains in active mode to handle a
request. Directly translating the energy consumption of physical
devices from our run-time energy model to the parameter-based model of
the respective guest OS would yield only inaccurate results. The VMM
would have to calibrate the energy consumption of the devices to
calculate the energy parameters of the virtual devices. Furthermore,
parameters of shared devices may change with the number of VMs, which
contradicts the original estimation model. To ensure accuracy in the
long run, the guest would have to query the virtual devices regularly
for updated parameters.
For our current virtual disk energy model, we therefore use a
para-virtual device extension. We expose each disk energy meter as an
extension of the virtual disk device; energy-aware guest operating
systems can take advantage of them by customizing the standard device
driver appropriately.
For application-specific energy management, we have incorporated the
familiar resource container concept into a standard version of our
para-virtualized Linux 2.6 adoption. Our implementation relies on a
previous approach to use resource containers in the context of CPU
energy management [ 3, 24]. We
extended the original version with support for disk energy. No further
efforts were needed to manage virtual CPU energy; we only had to
virtualize the performance counters to get the original version to
run.
Similar to the host-level subsystem, the energy-aware guest operating
system performs scheduling based on energy criteria. In contrast to
standard schedulers, it uses resource containers as the base
abstraction rather than threads or processes. Each application is
assigned to a resource container, which then accounts all energy spent
on its behalf. To account virtual CPU energy, the resource container
implementation retrieves the (virtual) performance counter values on
container switches, and charges the resulting energy to the previously
active container. A container switch occurs on every context switch
between processes residing in different containers.
To account virtual disk energy, we enhanced the client-side of the
virtual device driver, which forwards disk requests to the device
driver VM. Originally, the custom device driver received single disk
requests from the Linux kernel, which contained no information about
the user-level application that caused it. We added a pointer to a
resource container to every data structure involved in a read or write
operation. When an application starts a disk operation, we bind the
current resource container to the according page in the page
cache. When the kernel writes the pages to the virtual disk, we pass
the resource container on to the respective data structures (i.e.,
buffer heads and bio objects). The custom device driver in the client
accepts requests in form of bio objects and translates them to a
request for the device driver VM. When it receives the reply together
with the cost for processing the request, it charges the cost to the
resource container bound to the bio structure.
To control the energy consumption of virtual devices, the guest kernel
redistributes its own, VM-wide power limits to
subordinate resource containers, and enforces them by means of
preemption. Whenever a container exhausts the energy budget of the
current period (presently set to 50 ms), it is preempted until a
refresh occurs in the next period. A simple user-level application
retrieves the VM wide budgets from host-level energy-manager and
passes them onto the guest kernel via special system calls.
4 Experiments and Results
In the following section, we present experimental results we obtained
from our prototype. Our main goal is to demonstrate that our
infrastructure provides an effective solution to manage energy in
distributed, multi-layered OSes. We consider two aspects as relevant:
At first, we validate the benefits of distributed energy
accounting. We then present experiments that aim to show the
advantages of multi-layered resource allocation to enforce energy
constraints.
For CPU measurements, we used a Pentium D 830 with two cores at
3GHz. Since our implementation is currently limited to single
processor systems, we enabled only on one core, which always ran at
its maximum frequency. When idle, the core consumes about 42W; under
full load, power consumption may be 100W and more. We performed disk
measurements on a Maxtor DiamondMax Plus 9 IDE hard disk with 160GB
size, for which we took the active power (about 5.6W) and idle power
(about 3.6W) characteristics from the data sheet
[16]. We validated our internal, estimation-based
accounting mechanisms by means of an external high-performance data
acquisition (DAQ) system, which measured the real disk and CPU power
consumption with a sampling frequency of 1KHz.
To evaluate our approach of distributed energy accounting, we measured
the overall energy required for using a virtual disk. For that
purpose, we ran a synthetic disk stress test within a Linux guest
OS. The test runs on a virtual hard drive, which is multiplexed on the
physical disk by the disk driver VM. The test performs almost no
computation, but generates heavy disk load. By opening the virtual
disk in raw access mode, the test bypasses most of the guest
OS's caching effects, and causes the file I/O to be performed directly
to and from user space buffers. Afterwards, the test permanently reads
(writes) consecutive disk blocks of a given size from (to) the disk,
until a maximum size has been reached. We performed the test for block
sizes from 0.5 KByte up to 32 KByte. We obtained the required energy
per block size to run the benchmark from our accounting
infrastructure.
Figure 7:
Energy distribution for CPU and disk during the disk stress
test. The thin bar shows the real CPU and disk power consumption,
measured with an external DAQ system.
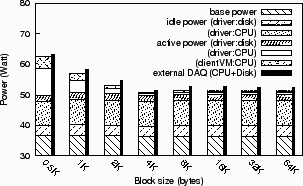 |
The results for the read case are shown in Figure
7. The write case yields virtually the same energy
distribution; for reasons of space, we do not show it here. For each
size, the figure shows disk and CPU power consumption of the client
and the device driver VM. The lowermost part of each bar shows the
base CPU power consumption required by core components such as the
hypervisor and the user-level VMM (36W); this part is consumed
independently of any disk load. The upper parts of each bar show the
active and idle power consumption caused by the stress test, broken
into CPU and disk consumption. Since the client VM is the only
consumer of the hard disk, it is accounted the complete idle disk
power (3.5) and CPU power (8W) consumed by the driver VM. Since the
benchmark saturates the disk, the active disk power consumption of the
disk driver mostly stays at its maximum (2W), which is again accounted
to the client VM as the only consumer. Active CPU power consumption in
the driver VM heavily depends on the block size and ranges from 9W for
small block sizes down to 1W for large ones. Note that the CPU costs
for processing a virtual disk request may even surpass the costs for
handling the request on the physical disk. Finally, active CPU power
consumption in the client VM varies with the block sizes as well, but
at a substantially lower level; the lower level comes unsurprising, as
the benchmark bypasses most parts of the disk driver in the client
OS. The thin bar on the right of each energy bar shows the real power
consumption of the CPU and disk, measured with the external DAQ system.
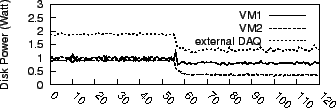
Figure 8:
Disk power consumption and throughput of two constrained
disk test simultaneously running in two different guest VMs.
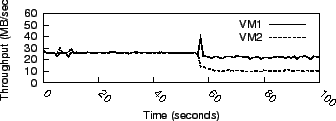 |
To demonstrate the capabilities of VM-based energy allocation, and to
evaluate the behavior of our disk throttling algorithm over time, we
performed a second experiment with two clients that
simultaneously require disk service from the driver. The clients
interface with a single disk driver VM, but operate on distinct hard
disk partitions. We set the active driver power limit of client VM 1
to 1W and the limit of client VM 2 to 0.5W, and periodically obtained
driver energy and disk throughput over a period of about 2
minutes. Figure 8 shows both distributions; we set the
limit about 45 seconds after having started the measurements. Our
experiment demonstrates the driver's capabilities to VM-specific
control over power consumption. The internal accounting and control
furthermore corresponds with the external measurements.
In the next experiment, we compared the effects of enforcing power
limits at the host-level against the effects of guest-level
enforcement. In the first part of the experiment, we ran two instances
of the compute-intensive bzip2 application within an energy-unaware
guest OS. In the unconstrained case, a single bzip2 instance causes an
active CPU power consumption of more than 50W. The guest, in turn, is
alloted an overall CPU active power of only 40W. As the guest is not
energy-aware, the limit is enforced by the host-level subsystem. In
the second part, we used an energy-aware guest, which complies with
the alloted power itself. It redistributes the budget among the two
bzip2 instances using the resource container facility. Within the
guest, we set the application-level power limits to 10W for the first,
and to 30W for the second bzip2 instance. Note that the power limits
are effective limits; strictly spoken, both bzip2 still consume each
50 Joules per second when running; however, the resource container
implementation reduces the each task time accordingly, with the result
that over time, the limits are effectively obeyed.
Figure 9:
Guest-Level energy redistribution.
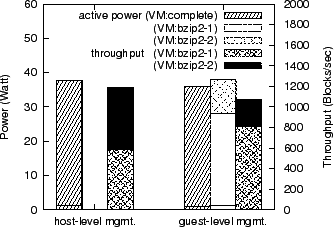 |
The results are given in Figure 9. For both cases, the
figure shows overall active CPU power of the guest VM in the leftmost
bar, and the throughput broken down to each bzip2 instance in the
rightmost bar. For the energy-aware VM, we additionally obtained the
power consumption per bzip2 instance as seen by the guest's energy
management subsystem itself; it is drawn as the bar in the middle.
Note that the guest's view of the power consumption is slightly higher
than the view of the host-level energy manager. Hence, the guest
imposes somewhat harsher power limits, and causes the overall
throughput of both bzip2 instances to drop compared to host-level
control. We attribute the differences in estimation to the clock drift
and rounding errors in the client.
However, the results are still as expected: host-level control
enforces the budgets independent of the guest's particular
capabilities - but the enforcement treats all guest's applications as
equal and thus reduces the throughput of both bzip2 instances
proportionally. In contrast, guest-level management allows the guest
to respect its own user priorities and preferences: it allots a higher
power budget to the first bzip2 instance, resulting in a higher
throughput compared to the second instance.
5 Related Work
There has been a considerable research interest in involving operating
systems and applications in the management of energy and power of a
computer system [14,10,27,9,25,6,7]. Except for the approach of
vertically structured OSes, which will be discussed here, none of them
has addressed the problems that arise if the OS consists of several
layers and is distributed across multiple components, as current
virtualization environments do. To our knowledge, neither the popular
Xen hypervisor
[2,19] nor VMware's most recent
hypervisor-based ESX Server [22] support
distributed energy accounting or allocation across module boundaries
or software layers.
Achieving accurate and easy accounting of energy by vertically
structuring an OS was proposed by the designers of
Nemesis [14,18]. Their
approach is very similar to our work in that it addresses
accountability issues within multi-layered OSes. A vertically
structured system multiplexes all resources at a low level, and moves
protocol stacks and most parts of device drivers into user-level
libraries. As a result, shared services are abandoned, and the
activities typically performed by the kernel are executed within each
application itself. Thus, most resource and energy consumption can be
accounted to individual applications, and there is no significant
anonymous consumption anymore.
Our general observation is that hypervisor-based VM environments are
structured similarly to some extent: a hypervisor also multiplexes the
system resources at a low level, and lets each VM use its own protocol
stack and services. Unfortunately, a big limitation of vertical
structuring is that it is hard to achieve with I/O device drivers. As
only one driver can use the device exclusively, all applications share
a common driver provided by the low-level subsystem. To process I/O
requests, a shared driver consumes CPU resources, which recent
experiments demonstrate to be substantial in multi-layered systems
that are used in practice [5]. In a completely
vertically structured system, the processing costs and energy can not
be accounted to the applications. In contrast, it was one of the key
goals of our work to explicitly account the energy spent in service or
driver components.
The ECOSystem [27] approach resembles our
work in that it proposes to use energy as the base abstraction for
power management and to treat it as a first-class OS
resource. ECOSystem presents a currentcy model that allows to
manage the energy consumption of all devices in a uniform way. Apart
from its focus on a monolithic OS design, ECOSystem differs from our
work in several further aspects. The main goal of ECOSystem is to
control energy consumption of mobile systems, in order to extend their
battery lifetime. To estimate the energy consumption of individual
tasks, ECOSystem attributes power consumptions to different states of
each device (e.g. standby, idle, and active states) and charges
applications if they cause a device switch to a higher power state.
ECOSystem does not distinguish between the fractions contributed by
different devices; all cost that a task causes is accumulated to one
value. This allows the OS to control the overall energy consumption
without considering the currently installed devices. However, it
renders the approach too inflexible for other energy management
schemes such as thermal management, for which energy consumption must
be managed individually per device.
In previous work [3], Bellosa et
al. proposed to estimate the energy consumption of the CPU for the
purpose of thermal management. The approach leverages the performance
monitoring counters present in modern processors to accurately
estimate the energy consumption caused by individual tasks. Like the
ECOSystem approach, this work uses a monolithic operating system
kernel. Also, the estimated energy consumption is just a means to the
end of a specific management goal, i.e., thermal management. Based on
the energy consumption and a thermal model, the kernel estimates the
temperature of the CPU and throttles the execution of individual tasks
according to their energy characteristics if the temperature reaches a
predefined limit.
6 Conclusion
In this work, we have presented a novel framework for managing energy
in multi-layered OS environments. Based on a unified energy model and
mechanisms for energy-aware resource accounting and allocation, the
framework provides an effective infrastructure to account, distribute,
and control the power consumption at different software layers. In
particular, the framework explicitly accounts the recursive energy
consumption spent in the virtualization layer or subsequent driver
components. Our prototypical implementation encompasses a host-level
subsystem controlling global power constraints and, optionally, an
energy-aware guest OS for local, application-specific power
management. Experiments show that our prototype is capable of
enforcing power limits for energy-aware and energy-unaware guest
OSes.
We see our work as a support infrastructure to develop and evaluate
power management strategies for VM-based systems. We consider three
areas to be important and prevalent for future work: devices with
multiple power states, processors with support for hardware-assisted
virtualization, and multi-core architectures. There is no design limit
with respect to the integration into our framework, and we are actively
developing support for them.
Acknowledgements
We would like to thank Simon Kellner, Andreas Merkel, Raphael Neider,
and the anonymous reviewers for their comments and helpful
suggestions. This work was in part supported by the Intel
Corporation.
- 1
-
G. Banga, P. Druschel, and J. C. Mogul.
Resource containers: A new facility for resource management in server
systems.
In Proceedings of the 4th Symposium on Operating Systems Design
and Implementation, pages 45-58, Berkeley, CA, Feb. 1999.
- 2
-
P. Barham, B. Dragovic, K. Fraser, S. Hand, T. Harris, A. Ho, R. Neugebauer,
I. Pratt, and A. Warfield.
Xen and the art of virtualization.
In Proceedings of the 19th Symposium on Operating System
Principles, pages 164-177, Bolton Landing, NY, Oct. 2003.
- 3
-
F. Bellosa, A. Weissel, M. Waitz, and S. Kellner.
Event-driven energy accounting for dynamic thermal management.
In Proceedings of the Workshop on Compilers and Operating
Systems for Low Power, pages 1-10, New Orleans, LA, Sept. 2003.
- 4
-
R. Bianchini and R. Rajamony.
Power and energy management for server systems.
IEEE Computer, 37(11):68-74, 2004.
- 5
-
L. Cherkasova and R. Gardner.
Measuring CPU overhead for I/O processing in the Xen virtual
machine monitor.
In Proceedings of the USENIX Annual Technical Conference,
pages 387-390, Anaheim, CA, Apr. 2005.
- 6
-
K. Flautner and T. N. Mudge.
Vertigo: automatic performance-setting for Linux.
In Proceedings of the 5th Symposium on Operating Systems Design
and Implementation, pages 105-116, Boston, MA, Dec. 2002.
- 7
-
J. Flinn and M. Satyanarayanan.
Energy-aware adaptation for mobile applications.
In Proceedings of the 17th Symposium on Operating System
Principles, pages 48-63, Charleston, SC, Dec. 1999.
- 8
-
K. Fraser, S. Hand, R. Neugebauer, I. Pratt, A. Warfield, and M. Williamson.
Safe hardware access with the Xen virtual machine monitor.
In 1st Workshop on Operating System and Architectural Support
for the On-Demand IT Infrastructure, Boston, MA, Oct. 2004.
- 9
-
M. Gomaa, M. D. Powell, and T. N. Vijaykumar.
Heat-and-run: leveraging SMT and CMP to manage power density
through the operating system.
In Proceedings of the 11th International Conference on
Architectural Support for Programming Languages and Operating Systems, pages
260-270, Boston, MA, Sept. 2004.
- 10
-
S. Gurumurthi, A. Sivasubramaniam, M. Kandemir, and H. Franke.
DRPM: dynamic speed control for power management in server class
disks.
In Proceedings of the 30th annual international symposium on
Computer architecture (ISCA), pages 169-181, New York, NY, June 2003.
- 11
-
H. Härtig, M. Hohmuth, J. Liedtke, and S. Schönberg.
The performance of  -kernel based systems. -kernel based systems.
In Proceedings of the 16th Symposium on Operating System
Principles, pages 66-77, Saint Malo, France, Oct. 1997.
- 12
-
T. Heath, A. P. Centeno, P. George, L. Ramos, Y. Jaluria, and R. Bianchini.
Mercury and Freon: temperature emulation and management in server
systems.
In Proceedings of the 12th International Conference on
Architectural Support for Programming Languages and Operating Systems, pages
106-116, San Jose, CA, Oct. 2006.
- 13
-
R. Joseph and M. Martonosi.
Run-time power estimation in high performance microprocessors.
In Proceedings of the 2001 International Symposium on Low Power
Electronics and Design, pages 135-140, Huntington Beach, CA, Aug. 2001.
- 14
-
I. M. Leslie, D. McAuley, R. Black, T. Roscoe, P. T. Barham, D. Evers,
R. Fairbairns, and E. Hyden.
The design and implementation of an operating system to support
distributed multimedia applications.
IEEE Journal of Selected Areas in Communications,
14(7):1280-1297, Sept. 1996.
- 15
-
J. LeVasseur, V. Uhlig, J. Stoess, and S. Götz.
Unmodified device driver reuse and improved system dependability via
virtual machines.
In Proceedings of the 6th Symposium on Operating Systems Design
and Implementation, pages 17-30, San Fransisco, CA, Dec. 2004.
- 16
-
Maxtor Corporation.
DiamondMax Plus 9 Data Sheet, 2003.
- 17
-
A. Merkel and F. Bellosa.
Balancing power consumption in multiprocessor systems.
In Proceedings of the 1st EuroSys conference, pages 403-414,
Leuven, Belgium, Apr. 2006.
- 18
-
R. Neugebauer and D. McAuley.
Energy is just another resource: Energy accounting and energy pricing
in the nemesis OS.
In Proceedings of 8th Workshop on Hot Topics in Operating
Systems, pages 67-74, Schloß Elmau, Oberbayern, Germany, May 2001.
- 19
-
I. Pratt, K. Fraser, S. Hand, C. Limpach, A. Warfield, D. Magenheimer,
J. Nakajima, and A. Malick.
Xen 3.0 and the art of virtualization.
In Proceedings of the 2005 Ottawa Linux Symposium, pages
65-85, Ottawa, Canada, July 2005.
- 20
-
J. Stoess and V. Uhlig.
Flexible, low-overhead event logging to support resource scheduling.
In Proceedings of the Twelfth International Conference on
Parallel and Distributed Systems, volume 2, pages 115-120, Minneapolis, MN,
July 2006.
- 21
-
V. Uhlig, J. LeVasseur, E. Skoglund, and U. Dannowski.
Towards scalable multiprocessor virtual machines.
In Proceedings of the 3rd Virtual Machine Research and
Technology Symposium, pages 43-56, San Jose, CA, May 2004.
- 22
-
VMware Inc.
ESX Server Data Sheet, 2006.
- 23
-
C. A. Waldspurger and W. E. Weihl.
Lottery scheduling: Flexible proportional-share resource management.
In Proceedings of the 1st Symposium on Operating Systems Design
and Implementation, pages 1-11, Monterey, CA, Nov. 1994.
- 24
-
A. Weissel and F. Bellosa.
Dynamic thermal management for distributed systems.
In Proceedings of the 1st Workshop on Temperature-Aware Computer
Systems, Munich, Germany, May 2004.
- 25
-
A. Weissel, B. Beutel, and F. Bellosa.
Cooperative IO - a novel IO semantics for energy-aware
applications.
In Proceedings of the 5th Symposium on Operating Systems Design
and Implementation, pages 117-130, Boston, MA, Dec. 2002.
- 26
-
J. Zedlewski, S. Sobti, N. Garg, F. Zheng, A. Krishnamurthy, and R. Wang.
Modeling hard-disk power consumption.
In Proceedings of the Second Conference on File and Storage
Technologies, pages 217-230, San Francisco, CA, Mar. 2003.
- 27
-
H. Zeng, C. S. Ellis, A. R. Lebeck, and A. Vahdat.
ECOSystem: managing energy as a first class operating system
resource.
In Proceedings of the 10th International Conference on
Architectural Support for Programming Languages and Operating Systems, pages
123-132, San Jose, CA, Oct. 2002.
- 28
-
H. Zeng, C. S. Ellis, A. R. Lebeck, and A. Vahdat.
Currentcy: unifying policies for resource management.
In Proceedings of the USENIX 2003 Annual Technical Conference,
pages 43-56, San Antonio, TX, June 2003.
Footnotes
- 1
- Our observation is substantiated by the study in
[26], which indicates that such a 2-parameter
model is inaccurate only because of sleep-modes, which we can safely
disregard for our approach.
|

