|
Security '05 Paper
[Security '05 Technical Program]



Automating Mimicry Attacks Using Static Binary Analysis
Christopher Kruegel and Engin Kirda
Technical University Vienna
chris@auto.tuwien.ac.at, engin@infosys.tuwien.ac.at
Darren Mutz, William Robertson, and Giovanni Vigna
Reliable Software Group, University of California, Santa Barbara
{dhm,wkr,vigna}@cs.ucsb.edu
Abstract:
Intrusion detection systems that monitor sequences of system calls
have recently become more sophisticated in defining legitimate
application behavior. In particular, additional information, such as
the value of the program counter and the configuration of the
program's call stack at each system call, has been used to achieve
better characterization of program behavior. While there is common
agreement that this additional information complicates the task for
the attacker, it is less clear to which extent an intruder is
constrained.
In this paper, we present a novel technique to evade the extended
detection features of state-of-the-art intrusion detection systems and
reduce the task of the intruder to a traditional mimicry attack. Given
a legitimate sequence of system calls, our technique allows the
attacker to execute each system call in the correct execution context
by obtaining and relinquishing the control of the application's
execution flow through manipulation of code pointers.
We have developed a static analysis tool for Intel x86 binaries that
uses symbolic execution to automatically identify instructions that
can be used to redirect control flow and to compute the necessary
modifications to the environment of the process. We used our tool to
successfully exploit three vulnerable programs and evade detection by
existing state-of-the-art system call monitors. In addition, we
analyzed three real-world applications to verify the general
applicability of our techniques.
Keywords: Binary Analysis, Static Analysis,
Symbolic Execution, Intrusion Detection, Evasion.
One of the first host-based intrusion detection
systems [5] identifies attacks by finding anomalies
in the stream of system calls issued by user programs. The technique
is based on the analysis of fixed-length sequences of system
calls. The model of legitimate program behavior is built by observing
normal system call sequences in attack-free application runs. During
detection, an alert is raised whenever a monitored program issues a
sequence of system calls that is not part of the model.
A problem with this detection approach arises in situations where
an attack does not change the sequence of system calls. In particular,
the authors of [17] observed that the intrusion
detection system can be evaded by carefully crafting an exploit that
produces a legitimate sequence of system calls while performing
malicious actions. Such attacks were named mimicry attacks.
To limit the vulnerability of the intrusion detection system to
mimicry attacks, a number of
improvements
have been proposed [4,9,14]. These improvements are based on additional
information that is recorded with each system call. One example [14] of
additional information is the origin of the system call (i.e., the
address of the instruction that invokes the system
call). In this case, the intrusion detection
system examines the value of the program counter whenever a system
call is performed and compares it to a list of legitimate ``call
sites.'' The idea was extended in [4] by
incorporating into the analysis information about the call stack
configuration at the time of a system call invocation.
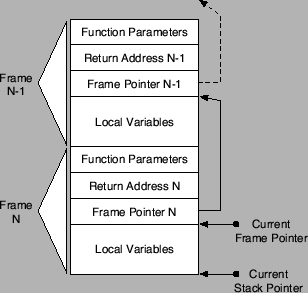
A call stack describes the current status and a partial history of
program execution by analyzing the return addresses that are stored on
the program's run-time stack. To extract the return addresses, it is necessary to unwind
the stack, frame by frame.
Figure 1 shows a number of frames on a program
stack and the chain of frame (base) pointer references that are used
for stack unwinding.
Figure 1:
Call stack and chain of frame pointers.
|
Checking the program counter and the call stack at each system call
invocation serves two purposes for the defender. First, the check makes sure that
the system call was made by the application code. This thwarts all
code injection attacks in which the injected code directly invokes a
system call.
Second, after a system call has finished, control is guaranteed to
return to the original application code. This is because the return
addresses on the stack have been previously verified by the intrusion
detection system to point to valid instructions in the application code segment. This has an
important implication. Even if the attacker can hijack control and force the application
to perform a single system call that evades detection, control would return
to the original program code after this system call has finished.
The common agreement is that by including additional information into
the model, it is significantly more difficult to mount mimicry
attacks [3]. However, although additional
information undoubtedly complicates the task of the intruder, the
extent to which the attack becomes more complicated is less
clear. System-call-based intrusion detection systems
are not designed to prevent attacks (for example, buffer overflows)
from occurring. Instead, these systems rely on the assumption that any
activity by the attacker appears as an anomaly that can be detected.
Unfortunately, using these detection techniques, the attacker is still
granted full control of the running process. While the ability to
invoke system calls might be significantly limited, arbitrary code can
be executed. This includes the possibility to access and
modify all writable memory segments.
The ability to modify program variables is in itself a significant
threat. Consider, for example, an attacker that alters variables that
are subsequently used as open or execv system call parameters.
After the modification, the attacker lets
the process continue. Eventually, a
system call is invoked that uses values controlled by the attacker.
Because the system
call is made by legitimate application code, the intrusion remains undetected.
In some cases, however, modifying program variables is not sufficient
to compromise a process and the attacker is required to perform system
calls. Given the assumption that an attacker has complete knowledge
about the detection technique being used, it is relatively
straightforward to force the application to perform one undetected
system call. To do so,
the attacker first pushes
the desired system call parameters on the stack and then jumps
directly to the
address in the application program where the system call is done. Of
course, it is also possible to jump to a library function (e.g., fopen or execlp) that eventually performs the system call. Because
it is possible for the injected code to write to the stack segment,
one can inject arbitrary stack frames and spoof any desired function
call history. Thus, even if the intrusion detection system follows the
chain of function return addresses (with the help of the stored base
pointers), detection can be evaded.
The problem from the point of view of the attacker is that after the
system call finishes, the checked stack is used to determine the
return address. Therefore, program execution can only continue at a
legitimate program address and execution cannot be diverted to the
attacker code. As a consequence, there is an implicit belief that the
adversary can at most invoke a single system call. This constitutes a
severe limitation for the intruder, since most attacks require
multiple system calls to succeed (for example, a call to setuid
followed by a call to execve). This limitation, however, could
be overcome if the attacker were able to somehow regain control
after the first system call completed. In that case, another forged
stack can be set up to invoke the next system call. The alternation of
invoking system calls and regaining control can be repeated until the
desired sequence of system calls (with parameters chosen by the
attacker) is executed.
For the purpose of this discussion, we assume that the attacker has
found a vulnerability in the victim program that allows the injection
of malicious code. In addition, we assume that the attacker has
identified a sequence of system calls
 that
can be invoked after a successful exploit without triggering the
intrusion detection system (embedded within this sequence is
the attack that the intruder actually wants to execute). Such a
sequence could be either extracted from the program model of the intrusion
detection system or learned by observing legitimate program
executions. By repeatedly forcing the victim application to make a
single undetected system call (of a legitimate sequence) and later
regaining control, the protection mechanisms offered by additional
intrusion detection features (such as checking return addresses or
call histories) are circumvented. Thus, the task of the intruder is
reduced to a traditional mimicry attack, where only the order of
system calls is of importance. that
can be invoked after a successful exploit without triggering the
intrusion detection system (embedded within this sequence is
the attack that the intruder actually wants to execute). Such a
sequence could be either extracted from the program model of the intrusion
detection system or learned by observing legitimate program
executions. By repeatedly forcing the victim application to make a
single undetected system call (of a legitimate sequence) and later
regaining control, the protection mechanisms offered by additional
intrusion detection features (such as checking return addresses or
call histories) are circumvented. Thus, the task of the intruder is
reduced to a traditional mimicry attack, where only the order of
system calls is of importance.
In this paper, we present techniques to regain control flow by
modifying the execution environment (i.e., modifying the content of
the data, heap, and/or stack areas) so that the application code is
forced to return to the injected attack code at some point after a
system call. To this end, we have developed a static analysis tool
that performs symbolic execution of x86 binaries to automatically
determine instructions that can be exploited to regain control. Upon
detection of exploitable instructions, the code necessary to
appropriately set up the execution environment is generated. Using our
tool, we successfully exploited sample applications protected by the
intrusion detection systems presented in [4] and
[14], and evaded their detection.
The paper makes the following primary contributions:
- We describe novel attack techniques against two well-known
intrusion detection
systems [4,14] that evade the
extended detection features and reduce the task of the intruder to
a traditional mimicry attack.
- We implemented a tool that allows the automated application of our
techniques by statically analyzing the victim binary.
- We present experiments where our tool was used to generate
exploits against vulnerable sample programs. In addition, our system
was run on real-world applications to demonstrate the practical
applicability of our techniques.
Although our main contributions focus on the automated evasion of two
specific intrusion detection systems, an important point of our work
is to demonstrate that, in general, allowing attackers to execute
arbitrary code can have severe security implications.
The paper is structured as follows. In Section 2, we
review related work on systems that perform intrusion detection using
system calls. In Section 3, we outline our techniques to
regain control flow. Section 4 provides an in-depth
description of our proposed static analysis and symbolic
execution techniques. In Section 5, we demonstrate that our tool
can be used to successfully exploit sample programs without raising
alarms. In addition, the system is run on three real-world
applications to underline the general applicability of our approach. Finally, in Section 6, we briefly
conclude and outline future work.
2 Related Work
System calls have been used extensively to characterize the normal
behavior of applications.
In [7], a classification is
presented that divides system-call-based intrusion detection systems
into three categories: ``black-box'', ``gray-box'', and ``white-box''.
The classification is based on the source of information that is used to
build the system call profiles and to monitor the running processes.
Black-box approaches only analyze the system calls invoked by the
monitored application without considering any additional information.
The system presented in [5], which is based
on the analysis of fixed-length sequences of system calls, falls into
this category. Alternative data models for this approach were
presented in [18], while the work
in [19] lifted the restriction of fixed-length
sequences and proposed the use of variable-length patterns. However,
the basic means of detection have remained the same.
Gray-box techniques extend the black-box approaches by including
additional run-time information about the process' execution state.
This includes the origin of the system call [14]
and the call stack [4], as described in the
previous section. Another system that uses context information was
introduced in [6]. Here, the call stack is used to
generate an execution graph that corresponds to the maximal subset of
the program control flow graph that one can construct given the
observed runs of the program.
White-box techniques extract information directly from the monitored
program. Systems in this class perform static analysis of the
application's source code or binary
image. In [16], legal system call sequences are
represented by a state machine that is extracted from the control-flow
graph of the application. Although the system is guaranteed to raise
no false positives, it is vulnerable to traditional mimicry attacks. Another
problem of this system is its run-time overhead, which
turns out to be prohibitively high for some programs, reaching several
minutes per transaction. This problem was addressed
in [8], using several optimizations (e.g., the
insertion of ``null'' system calls), and later
in [9], where a Dyck model is used. For this
approach, additional system calls need to be inserted, which is
implemented via binary rewriting.
An approach similar to the one described in the previous paragraph was
introduced in [11]. In this work, system call
inlining and ``notify'' calls are introduced instead of the ``null''
system calls. Also, source code is analyzed instead of
binaries. Another system that uses static analysis to extract an
automaton with call stack information was presented
in [3]. The work in this paper is based on the
gray-box technique introduced in [4].
In [20], waypoints are inserted
into function prologues and epilogues to restrict the types of
system calls that they can invoke.
Black-box and gray-box techniques can only identify anomalous program
behavior on the basis of the previous execution of attack-free
runs. Therefore, it is possible that incomplete training data or
imprecise modeling lead to false positives. White-box approaches,
on the other hand, extract their models directly from the application
code. Thus, assuming that the program does not modify itself,
anomalies are a definite indication of an attack. On the downside,
white-box techniques often require the analysis of source code, which
is impossible in cases where the code is not available. Moreover, an
exhaustive static analysis of binaries is often prohibitively
complex [6].
This paper introduces attacks against two gray-box systems. Thus,
related work on attacking system-call-based detection approaches is
relevant. As previously mentioned, mimicry attacks against traditional
black-box designs were introduced in [17]. A
similar attack is discussed in [15], which is
based on modifying the exploit code so that system calls are issued in
a legitimate order. In [7], an attack was presented
that targets gray-box intrusion detection systems that use program
counter and call stack information. This attack is similar to ours in
that it is proposed to set up of a fake environment to regain control
after the invocation of a system call. The differences with respect to
the attack techniques described in this paper are twofold. First, the
authors mention only one technique to regain control of the
application's execution flow. Second, the process of regaining control
is performed completely manually. In fact, although the possibility to
regain control flow by having the program overwrite a return address
on the stack is discussed, no example is provided that uses this
technique. In contrast, this paper demonstrates that attacks of this
nature can be successfully automated using static analysis of binary code.
3 Regaining Control Flow
In this section, we discuss possibilities to regain control after the
attacker has returned control to the application (e.g., to perform a system
call). To regain control, the attacker has the option of preparing the
execution environment (i.e., modifying the content of the data, heap,
and stack areas) so that the application code is forced to return to
the attacker code at some point after the system call. The task can
be more formally described as follows: Given a program  , an address , an address
 , and an address , and an address  , find a configuration , find a configuration  such that, when
is executed starting from address , control flow will eventually
reach the target address . For our purposes, a configuration
comprises all values that the attacker can modify. This includes the
contents of all processor registers and all writable memory regions
(in particular, the stack, the heap, and the data segment). However,
the attacker cannot tamper with write-protected segments such as code
segments or read-only data. such that, when
is executed starting from address , control flow will eventually
reach the target address . For our purposes, a configuration
comprises all values that the attacker can modify. This includes the
contents of all processor registers and all writable memory regions
(in particular, the stack, the heap, and the data segment). However,
the attacker cannot tamper with write-protected segments such as code
segments or read-only data.
Regaining control flow usually requires that a code pointer is
modified appropriately. Two prominent classes of code pointers that an
attacker can target are function pointers and stack return
addresses. Other exploitable code pointers include longjmp
buffers.
A function pointer can be modified directly by code injected by the attacker
before control is returned to the application to make a system
call. Should the application later use this function pointer, control
is returned to the attacker code. This paper focuses on binary code
compiled from C source code, hence we analyze where function pointers can
appear in such executables. One instance is when the application
developer explicitly declares pointer variables to functions at the C
language level; whenever a function pointer is used by the
application, control can be recovered by changing the pointer
variable to contain the address of malicious code. However, although
function pointers are a commonly used feature in many C programs,
there might not be sufficient instances of such function invocations
to successfully perform a complete exploit.
A circumstance in which function pointers are used more
frequently is the invocation of shared library functions by
dynamically linked ELF (executable and linking format) binaries. When
creating dynamically linked executables, a special section (called
procedure linkage table - PLT) is created. The PLT is used as an
indirect invocation method for calls to globally defined functions.
This mechanism allows for the delayed binding
of a call to a globally defined function. At a high level, this means that the PLT stores the
addresses of shared library functions. Whenever a shared function is
invoked, an indirect jump is performed to the corresponding
address. This provides the attacker with the opportunity to modify the
address of a library call in the PLT to point to attacker code. Thus,
whenever a library function call is made, the intruder can regain
control.
The redirection of shared library calls is a very effective method of
regaining control, especially when one considers the fact that
applications usually do not invoke system calls directly. Instead,
almost all system calls are invoked through shared library
functions. Thus, it is very probable that an application executes a
call to a shared function before every system call. However, this
technique is only applicable to dynamically linked binaries. For
statically linked binaries, alternative mechanisms to recover control
flow must be found.
One such mechanism is the modification of the function return addresses
on the stack. Unfortunately (from the point of view of the attacker),
these addresses cannot be directly overwritten by the malicious
code. The reason, as mentioned previously, is that these addresses are
checked at every system call. Thus, it is necessary to force the
application to overwrite the return address after the attacker has
relinquished control (and the first system call has finished). Also,
because the stack is analyzed at every system call, no further system
calls may be invoked between the time when the return address is
modified and the time when this forged address is used in the function
epilogue (i.e., by the ret instruction).
In principle, every application instruction that writes a data value to
memory can be potentially used to modify a function return address. In
the Intel x86 instruction set, there is no explicit store
instruction. Being based on a CISC architecture, many instructions can
specify a memory location as the destination where the result
of an operation is stored. The most prominent family of instructions
that write data to memory are the data transfer instructions (using
the mov mnemonic).
Figure 2:
Unsuitable store instructions.
|
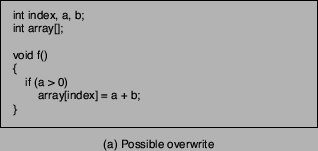
Of course, not all instructions that write to memory can be actually
used to alter a return address. For example, consider the C code
fragments and their corresponding machine instructions shown in
Figure 2. In the first example (a), the instruction writes
to a particular address (0x8049578, the address of the variable
global), which is specified by an immediate operand of the
instruction. This store instruction clearly cannot be forced to
overwrite an arbitrary memory address. In the other two cases ((b) and
(c)), the instruction writes to a location whose address is determined
(or influenced) by a value in a register. However, in example (b), the
involved register %eax has been previously loaded with a
constant value (again the address of the variable global) that
cannot be influenced by the intruder. Finally, even if the attacker
can choose the destination address of the store instruction, it is
also necessary to be able to control the content that is written to
this address. In example (c), the attacker can change the content of
the index variable before returning control to the application. When
the application then performs the array access using the modified
index variable, which is loaded into register %eax, the
attacker can write to an (almost) arbitrary location on the
stack. However, the constant value 0 is written to this address,
making the instruction not suitable to set a return address to the
malicious code.
The examples above highlight the fact that even if application code
contains many store instructions, only a fraction of them might be
suitable to modify return addresses. Even if the original program
contains assignments that dereference pointers (or access array
elements), it might not be possible to control both the destination of the store instruction and its content. The
possibility of using an assignment operation through a pointer to
modify the return address on the stack was previously discussed
in [7]. However, the authors did not address the
problem that an assignment might not be suitable to perform the actual
overwrite. Moreover, if a suitable instruction is found,
preparing the environment is often not a trivial task. Consider a
situation where an application first performs a number of operations
on a set of variables and later stores only the result. In this case, the
attacker has to set up the environment so that the result of these
operations exactly correspond to the desired value. In addition, one
has to consider the effects of modifications to the environment on the
control flow of the application.
Figure 3:
Possibly vulnerable code.
|
A simple example is shown in Figure 3. Here, the attacker
has to modify the variable index to point to the (return) address on the
stack that should be overwritten. The value that is written to this
location (i.e., the new return address) is determined by calculating
the sum of two variables  and and  . Also, one has to ensure that . Also, one has to ensure that
 because otherwise the assignment instruction would not be
executed. because otherwise the assignment instruction would not be
executed.
The presented examples serve only as an indication of the challenges
that an attacker faces when attempting to manually comprehend and
follow different threads of execution through a binary program. To
perform a successful attack, it is necessary to take into account the
effects of operations on the initial environment and consider
different paths of execution (including loops). Also, one has
to find suitable store instructions or indirect function calls that
can be exploited to recover control. As a result, one might argue that
it is too difficult for an attacker to repeatedly make system calls
and recover control, which is necessary to perform a successful
compromise. In the next section, we show that these difficulties can
be overcome.
4 Symbolic Execution
This section describes in detail the static analysis techniques we use
to identify and exploit possibilities for regaining control after the
invocation of a system call. As mentioned previously, control can be
regained when a configuration is found such that control flow will
eventually reach the target address when program is executed
starting from address .
Additional constraints are required to make sure that a program
execution does not violate the application model created by the
intrusion detection system. In particular, system calls may only be
invoked in a sequence that is considered legitimate by the intrusion
detection system. Also, whenever a system call is invoked, the chain
of function return addresses on the stack has to be valid. In our
current implementation, we enforce these restrictions simply by
requiring that the target address must be reached from without
making any intermediate system calls. In this way, we ensure that no
checks are made by the intrusion detection system before the attacker
gets a chance to execute her code. At this point, it is
straightforward to have the attack code rearrange the stack to produce
a valid configuration (correct chain of function return
addresses) and to make system calls in the correct order.
The key approach that we use to find a configuration for a program
and the two addresses and is symbolic
execution [10]. Symbolic execution is a technique that interpretatively
executes a program, using symbolic expressions instead of real values
as input. In our case, we are less concerned about the input to the
program. Instead, we treat all values that can be modified by the
attacker as variables. That is, the execution environment of the
program (data, stack, and heap) is treated as the variable input to the
code. Beginning from the start address , a symbolic
execution engine interprets the sequence of machine instructions.
To perform symbolic execution of machine instructions (in our case,
Intel x86 operations), it is necessary to extend the semantics of
these instructions so that operands are not limited to real data
objects but can also be symbolic expressions. The normal execution
semantics of Intel x86 assembly code describes how data objects are
represented, how statements and operations manipulate these data
objects, and how control flows through the statements of a
program. For symbolic execution, the definitions for the basic
operators of the language have to be extended to accept symbolic
operands and produce symbolic formulas as output.
Figure 4:
Symbolic execution.
|
We define the execution state  of program as a snapshot of the
content of the processor registers (except the program counter) and
all valid memory locations at a particular instruction of , which
is denoted by the program counter. Although it would be possible to
treat the program counter like any other register, it is more
intuitive to handle the program counter separately and to require that
it contains a concrete value (i.e., it points to a certain
instruction). The content of all other registers and memory locations
can be described by symbolic expressions. of program as a snapshot of the
content of the processor registers (except the program counter) and
all valid memory locations at a particular instruction of , which
is denoted by the program counter. Although it would be possible to
treat the program counter like any other register, it is more
intuitive to handle the program counter separately and to require that
it contains a concrete value (i.e., it points to a certain
instruction). The content of all other registers and memory locations
can be described by symbolic expressions.
Before symbolic execution starts from address , the execution state
is initialized by assigning symbolic variables to all processor
registers (except the program counter) and memory locations in
writable segments. Thus, whenever a processor register or a memory
location is read for the first time, without any previous assignment
to it, a new symbol is supplied from the list of variables
 . Note that this is
the only time when symbolic data objects are introduced. . Note that this is
the only time when symbolic data objects are introduced.
In our current system, we do not support floating point data objects
and operations, so all symbols (variables) represent integer
values. Symbolic expressions are linear combinations of these symbols
(i.e., integer polynomials over the symbols). A symbolic expression
can be written as
 where the where the  are constants. In
addition, there is a special symbol are constants. In
addition, there is a special symbol  that denotes that no
information is known about the content of a register or a memory
location. Note that this is very different from a symbolic
expression. Although there is no concrete value known for a
symbolic expression, its value can be evaluated when concrete values
are supplied for the initial execution state. For the symbol ,
nothing can be asserted, even when the initial state is completely
defined. that denotes that no
information is known about the content of a register or a memory
location. Note that this is very different from a symbolic
expression. Although there is no concrete value known for a
symbolic expression, its value can be evaluated when concrete values
are supplied for the initial execution state. For the symbol ,
nothing can be asserted, even when the initial state is completely
defined.
Figure 5:
Handling conditional branches during symbolic execution.
|
By allowing program variables to assume integer polynomials over the
symbols  , the symbolic execution of assignment statements
follows naturally. The expression on the right-hand side of the
statement is evaluated, substituting symbolic expressions for source
registers or memory locations. The result is another symbolic expression (an integer
is the trivial case) that represents the new value of the
left-hand side of the assignment statement. Because
symbolic expressions are integer polynomials, it is possible to
evaluate addition and subtraction of two arbitrary expressions. Also,
it is possible to multiply or shift a symbolic expression by a
constant value. Other instructions, such as the multiplication of two
symbolic variables or a logic operation (e.g., and, or),
result in the assignment of the symbol to the
destination. This is because the result of these operations cannot
(always) be represented as integer polynomial. The reason for
limiting symbolic formulas to linear expressions will become clear in
Section 4.3. , the symbolic execution of assignment statements
follows naturally. The expression on the right-hand side of the
statement is evaluated, substituting symbolic expressions for source
registers or memory locations. The result is another symbolic expression (an integer
is the trivial case) that represents the new value of the
left-hand side of the assignment statement. Because
symbolic expressions are integer polynomials, it is possible to
evaluate addition and subtraction of two arbitrary expressions. Also,
it is possible to multiply or shift a symbolic expression by a
constant value. Other instructions, such as the multiplication of two
symbolic variables or a logic operation (e.g., and, or),
result in the assignment of the symbol to the
destination. This is because the result of these operations cannot
(always) be represented as integer polynomial. The reason for
limiting symbolic formulas to linear expressions will become clear in
Section 4.3.
Whenever an instruction is executed, the execution state is
changed. As mentioned previously, in case of an assignment, the
content of the destination operand is replaced by the right-hand side
of the statement. In addition, the program counter is advanced.
In the case of an instruction that does not change the control flow
of a program (i.e., an instruction that is not a jump or a conditional
branch), the program counter is simply advanced to the next
instruction. Also, an unconditional jump to a certain label
(instruction) is performed exactly as in normal execution by
transferring control from the current statement to the statement
associated with the corresponding label.
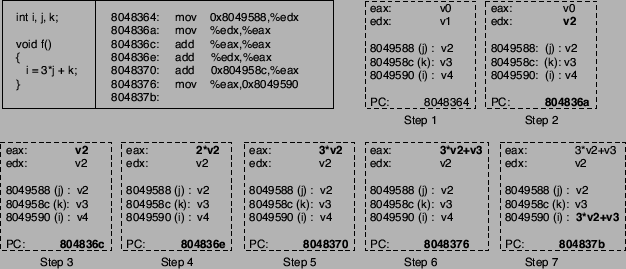
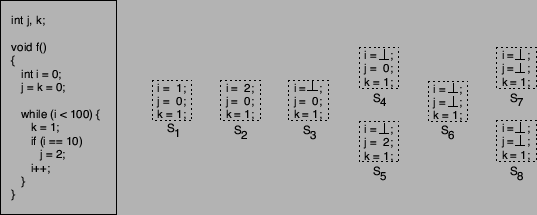
Figure 4 shows the symbolic execution of a sequence of
instructions. In addition to the x86 machine instructions, a
corresponding fragment of C source code is shown. For each step of the
symbolic execution, the relevant parts of the execution state are
presented. Changes between execution states are shown in bold face.
Note that the compiler (gcc 3.3) converted the multiplication in
the C program into an equivalent series of add machine
instructions.
To handle conditional branches, the execution state has to be extended
to include a set of constraints, called the path
constraints. In principle, a path constraint relates a symbolic
expression  to a constant. This can be used, for example, to
specify that the content of a register has to be equal to to a constant. This can be used, for example, to
specify that the content of a register has to be equal to  . More
formally, a path constraint is a boolean expression of the form . More
formally, a path constraint is a boolean expression of the form  or or  , in which is an integer polynomial over the symbols
. The set of path constraints forms a linear constraint
system. , in which is an integer polynomial over the symbols
. The set of path constraints forms a linear constraint
system.
The symbolic execution of a conditional branch statement starts in a
fashion similar to its normal execution, by evaluating the associated
Boolean expression. The evaluation is done by replacing the operands
with their corresponding symbolic expressions. Then, the inequality
(or equality) is transformed and converted into the standard form
introduced above. Let the resulting path constraint be called  . .
To continue symbolic execution, both branches of the control path need
to be explored. The symbolic execution forks into two
``parallel'' execution threads: one thread follows the then
alternative, the other one follows the else
alternative. Both execution threads assume the execution state which
existed immediately before the conditional statement but proceed
independently thereafter. Because the then alternative is only
chosen if the conditional branch is taken, the corresponding path
constraint must be true. Therefore, we add to the set of path
constraints of this execution thread. The situation is reversed for
the else alternative. In this case, the branch is not taken and
must be false. Thus,  is added to the path constraints in
this execution. is added to the path constraints in
this execution.
After (or ) is added to a set of path constraints, the
corresponding linear constraint system is immediately checked for
satisfiability. When the set of path constraints has no solution, this
implies that, independent of the choice of values for the initial
configuration , this path of execution can never occur. This allows
us to immediately terminate impossible execution threads.
Figure 6:
Fixpoint calculation.
|
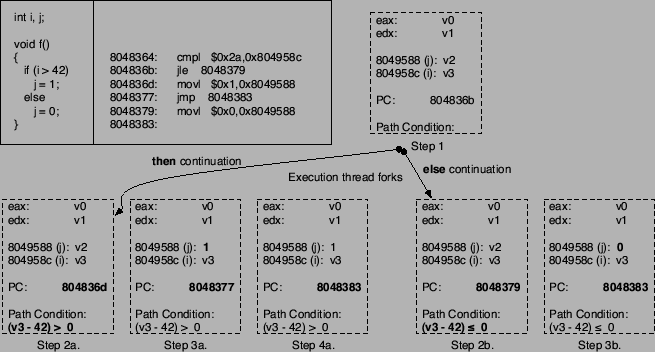
Each fork of execution at a conditional statement contributes a
condition over the variables that must hold in this
particular execution thread. Thus, the set of path constraints
determines which conditions the initial execution state must satisfy in
order for an execution to follow the particular associated path. Each
symbolic execution begins with an empty set of path constraints. As
assumptions about the variables are made (in order to choose between
alternative paths through the program as presented by conditional
statements), those assumptions are added to the set. An example of a
fork into two symbolic execution threads as the result of an if-statement and the corresponding path constraints are shown in
Figure 5. Note that the if-statement was translated into two
machine instructions. Thus, special code is required to extract the condition on which a branch statement
depends.
Because a symbolic execution thread forks into two threads at each
conditional branch statement, loops represent a problem.
In particular, we have to make sure that execution threads
``make progress'' to achieve our objective of eventually reaching the
target address . The problem is addressed by
requiring that a thread passes through the same loop at most three
times. Before an execution thread enters the same loop for the forth
time, its execution is halted. Then, the effect of an arbitrary number
of iterations of this loop on the execution state is approximated.
This approximation is a standard static analysis
technique [2,13] that aims at
determining value ranges for the variables that are modified in the
loop body. Since the problem of finding exact ranges and relationships
between variables is undecidable in the general case, the
approximation naturally involves a certain loss of precision. After
the effect of the loop on the execution thread was approximated, the thread can continue with the modified state after
the loop.
To approximate the effect of the loop body on an execution state, a
fixpoint for this loop is constructed. For our purposes, a fixpoint is
an execution state  that, when used as the initial state before
entering the loop, is equivalent to the final execution state when the
loop finishes. In other words, after the operations of the loop body
are applied to the fixpoint state , the resulting execution state
is again . Clearly, if there are multiple paths through the loop,
the resulting execution states at each loop exit must be the same (and
identical to ). Thus, whenever the effect of a loop on an execution
state must be determined, we transform this state into a fixpoint for
this loop. This transformation is often called widening. Then,
the thread can continue after the loop using the fixpoint as its new
execution state. that, when used as the initial state before
entering the loop, is equivalent to the final execution state when the
loop finishes. In other words, after the operations of the loop body
are applied to the fixpoint state , the resulting execution state
is again . Clearly, if there are multiple paths through the loop,
the resulting execution states at each loop exit must be the same (and
identical to ). Thus, whenever the effect of a loop on an execution
state must be determined, we transform this state into a fixpoint for
this loop. This transformation is often called widening. Then,
the thread can continue after the loop using the fixpoint as its new
execution state.
The fixpoint for a loop is constructed in an iterative fashion as
follows: Starting with the execution state  after the first
execution of the loop body, we calculate the execution state after the first
execution of the loop body, we calculate the execution state  after a second iteration. Then, and are compared. For each
register and each memory location that hold different values (i.e.,
different symbolic expressions), we assign as the new value.
The resulting state is used as the new state and another iteration of
the loop is performed. This is repeated until
after a second iteration. Then, and are compared. For each
register and each memory location that hold different values (i.e.,
different symbolic expressions), we assign as the new value.
The resulting state is used as the new state and another iteration of
the loop is performed. This is repeated until  and and  are
identical. In case of multiple paths through the loop, the algorithm
is extended by collecting one exit state for each path and then
comparing all pairs of states. Whenever a difference between a
register value or a memory location is found, this location is set to
. The iterative algorithm is guaranteed to terminate, because
at each step, it is only possible to convert the content of a memory
location or a register to . Thus, after each iteration, the
states are either identical or the content of some locations is made
unknown. This process can only be repeated until all values are
converted to unknown and no information is left. are
identical. In case of multiple paths through the loop, the algorithm
is extended by collecting one exit state for each path and then
comparing all pairs of states. Whenever a difference between a
register value or a memory location is found, this location is set to
. The iterative algorithm is guaranteed to terminate, because
at each step, it is only possible to convert the content of a memory
location or a register to . Thus, after each iteration, the
states are either identical or the content of some locations is made
unknown. This process can only be repeated until all values are
converted to unknown and no information is left.
An example for a fixpoint calculation (using C code instead of x86
assembler) is presented in Figure 6. In this case, the
execution state comprises of the values of the three involved
variables  , ,  , and , and  . After the first loop iteration, the
execution state is reached. Here, has been incremented once,
has been assigned the constant . After the first loop iteration, the
execution state is reached. Here, has been incremented once,
has been assigned the constant  , and has not been modified.
After a second iteration, is reached. Because has changed
between and , its value is set to in , and has not been modified.
After a second iteration, is reached. Because has changed
between and , its value is set to in  . Note
that the execution has not modified , because the value of was
known to be different from . Note
that the execution has not modified , because the value of was
known to be different from  at the if-statement. Using
as the new execution state, two paths are taken through the loop. In
one case ( at the if-statement. Using
as the new execution state, two paths are taken through the loop. In
one case ( ), is set to ), is set to  , in the other case ( , in the other case ( ), the
variable remains . The reason for the two different execution
paths is the fact that is no longer known at the if-statement and, thus, both paths have to be followed. Comparing
with and , the difference between the values of
variable leads to the new state ), the
variable remains . The reason for the two different execution
paths is the fact that is no longer known at the if-statement and, thus, both paths have to be followed. Comparing
with and , the difference between the values of
variable leads to the new state  in which is set to
. As before, the new state is used for the next loop
iteration. Finally, the resulting states in which is set to
. As before, the new state is used for the next loop
iteration. Finally, the resulting states  and and  are identical
to , indicating that a fixpoint is reached. are identical
to , indicating that a fixpoint is reached.
In the example above, we quickly reach a fixpoint. In general, by
considering all modified values as unknown (setting them to ),
the termination of the fixpoint algorithm is achieved very quickly.
However, the approximation might be unnecessarily imprecise. For
our current prototype, we use this simple approximation
technique [13]. However, we plan to investigate
more sophisticated fixpoint algorithms in the future.
To determine loops in the control flow graph, we use the
algorithm by Lengauer-Tarjan [12], which is
based on dominator trees. Note, however, that the control flow graph
does not take into account indirect jumps. Thus, whenever an indirect
control flow transfer instruction is encountered during symbolic
execution, we first check whether this instruction can be used to
reach the target address . If this is not the case, the execution
thread is terminated at this point.
Figure 7:
Deriving an appropriate configuration.
|
4.3 Generating Configurations
As mentioned in Section 4, the aim of the symbolic
execution is to identify code pointers that can be modified to point
to the attacker code. To this end, indirect jump and function call
instructions, as well as data transfer instructions (i.e., x86 mov) that could overwrite function return addresses, are of
particular interest. Thus, whenever the symbolic execution engine
encounters such an instruction, it is checked whether it can be
exploited.
An indirect jump (or call) can be exploited, if it is possible for the
attacker to control the jump (or call) target. In this case, it would
be easy to overwrite the legitimate target with the address of the
attacker code. To determine whether the target can be overwritten, the
current execution state is examined. In particular, the symbolic
expression that represents the target of the control transfer
instruction is analyzed. The reason is that if it were possible to
force this symbolic expression to evaluate to , then the attacker
could achieve her goal.
Let the symbolic expression of the target of the control transfer
instruction be called  . To check whether it is possible to force
the target address of this instruction to , the constraint . To check whether it is possible to force
the target address of this instruction to , the constraint  is generated (this
constraint simply expresses the fact that should evaluate to the
target address ). Now, we have to determine whether this constraint can
be satisfied, given the current path constraints. To this end, the
constraint is added to the path constraints, and the
resulting linear inequality system is solved. is generated (this
constraint simply expresses the fact that should evaluate to the
target address ). Now, we have to determine whether this constraint can
be satisfied, given the current path constraints. To this end, the
constraint is added to the path constraints, and the
resulting linear inequality system is solved.
If the linear inequality system has a solution, then the attacker can
find a configuration (i.e., she can prepare the environment) so
that the execution of the application code using this configuration
leads to an indirect jump (or call) to address . In fact, the
solution to the linear inequality system directly provides the desired
configuration. To see this, recall that the execution state is a
function of the initial state. As a result, the symbolic expressions
are integer polynomials over variables that describe the initial
state of the system, before execution has started from address
. Thus, a symbolic term expresses the current value of a register
or a memory location as a function of the initial values. Therefore,
the solution of the linear inequality system denotes which variables
of the initial state have to be set, together with their appropriate
values, to achieve the desired result. Because the configuration
fulfills the path constraints of the current symbolic execution
thread, the actual execution will follow the path of this
thread. Moreover, the target value of the indirect control transfer
instruction will be . Variables that are not part of the linear
inequality system do not have an influence on the choice of the path
or on the target address of the control flow instruction, thus, they
do not need to be modified.
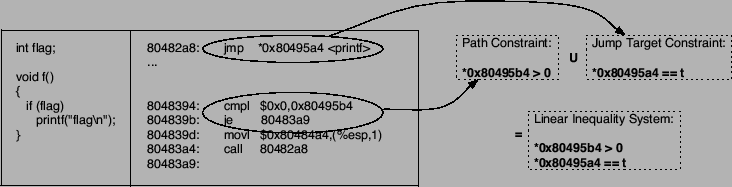
As an example, consider the sequence of machine instructions (and
corresponding C source code) shown in Figure 7. In this
example, the set of path constraints at the indirect jump consists of
a single constraint that requires flag (stored at address
0x80495b4) to be greater than . After adding the constraint that
requires the jump target (the address of the shared library function printf stored at 0x80495a4) to be equal to , the
inequality system is solved. In this case, the solution is trivial:
the content of the memory location that holds the jump target is set to and variable
flag is set to . In fact, any value greater than 0 would be
suitable for flag, but our constraint solver returns as the
first solution.
The handling of data transfer instructions (store operations) is
similar to the handling of control transfer instructions. The only
difference is that, for a data transfer instruction, it is necessary
that the destination address of the operation be set to a function
return address and that the source of the operation be set to
. If this is the case, the attacker can overwrite a function return
address with the address of the attacker code, and, on function
return, control is recovered. For each data transfer instruction, two
constraints are added to the linear inequation system. One constraint
requires that the destination address of the store operation is equal
to the function return address. The other constraint requires that the
stored value is equal to . Also, a check is required that makes
sure that no system call is invoked between the modification of the
function return address and its use in the function epilogue (i.e., on
function return). The reason is that the intrusion detection system
verifies the integrity of the call stack at each system call. Note,
however, that most applications do not invoke system calls directly
but indirectly using library functions, which are usually called
indirectly via the PLT. To solve the linear constraint systems, we use
the Parma Polyhedral Library (PPL) [1]. In general,
solving a linear constraint system is exponential in the number of
inequalities. However, PPL uses a number of optimizations to improve
the run time in practice and the number of inequalities is usually
sufficiently small.
In the previous discussion, two problems were ignored that
considerably complicate the analysis for real programs: memory
aliasing and store operations to unknown destination addresses.
Memory aliasing refers to the problem that two different symbolic
expressions  and and  point to the same address. That is,
although and contain different variables, both expressions
evaluate to the same value. In this case, the assignment of a value to
an address that is specified by has unexpected side effects. In
particular, such an assignment simultaneously changes the content of
the location pointed to by . point to the same address. That is,
although and contain different variables, both expressions
evaluate to the same value. In this case, the assignment of a value to
an address that is specified by has unexpected side effects. In
particular, such an assignment simultaneously changes the content of
the location pointed to by .
Memory aliasing is a typical problem in static analysis, which also
affects high-level languages with pointers (such as C). Unfortunately,
the problem is exacerbated at machine code level. The reason is that,
in a high-level language, only a certain subset of variables can be
accessed via pointers. Also, it is often possible to perform alias
analysis that further reduces the set of variables that might be
subject to aliasing. Thus, one can often guarantee that certain
variables are not modified by write operations through pointers. At
machine level, the address space is uniformly treated as an array of
storage locations. Thus, a write operation could potentially modify
any other variable.
In our prototype, we initially take an optimistic approach and assume
that different symbolic expressions refer to different memory
locations. This approach is motivated by the fact that C compilers (we
use gcc 3.3 for our experiments) address local and global
variables so that a distinct expression is used for each access to a
different variable. In the case of global variables, the address of the variable
is directly encoded in the instruction, making the identification of
the variable particularly easy. For each local variable, the access is done
by calculating a different offset to the value of the base pointer register
(%ebp).
Of course, our optimistic assumption might turn out to be incorrect,
and we assume the independence of two symbolic expressions when, in
fact, they refer to the same memory location. To address this problem,
we introduce an additional a posteriori check after a
potentially exploitable instruction was found. This check operates by
simulating the program execution with the new configuration that
is derived from the solution of the constraint system.
In many cases, having a configuration in which symbolic variables have
concrete numerical values allows one to resolve symbolic expressions
directly to unambiguous memory locations. Also, it can be determined
with certainty which continuation of a conditional branch is taken. In
such cases, we can guarantee that control flow will be successfully
regained. In other cases, however, not all symbolic expressions can be
resolved and there is a (small) probability that aliasing effects
interfere with our goal. In our current system, this problem is
ignored. The reason is that an attacker can simply run the attack to
check whether it is successful or not. If the attack fails, one can
manually determine the reason for failure and provide the symbolic
execution engine with aliasing information (e.g., adding constraints
to specify that two expressions are identical). In the future, we will
explore mechanisms to automatically derive constraints such that all
symbolic expressions can be resolved to a concrete value.
A store operation to an unknown address is related to the aliasing
problem as such an operation could potentially modify any memory
location. Again, we follow an optimistic approach and assume that such
a store operation does not interfere with any variable that is part of
the solution of the linear inequality system (and thus, part of the
configuration) and use simulation to check the validity of this
assumption.
5 Experimental Results
This section provides experimental results that demonstrate that our symbolic
execution technique is capable of generating configurations in
which control is recovered after making a system call (and, in doing
so, temporarily transferring control to the application program). For all
experiments, the programs were compiled using gcc 3.3 on a x86
Linux host. Our experiments were carried out on the binary
representation of programs, without accessing the source code.
For the first experiment, we attempted to exploit three sample
programs that were protected by the intrusion detection systems
presented in [4] and [14]. The
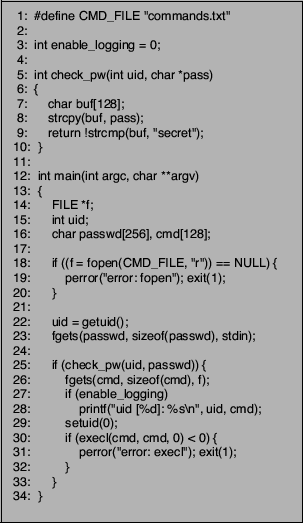
first vulnerable program is shown in Figure 8. This program
starts by reading a password from standard input. If the password is correct
(identical to the hard-coded string ``secret''), a command is read
from a file and then executed with superuser privileges. Also, the
program has a logging facility that can output the command and the
identifier of the user that has initially launched the program. The
automaton in Figure 9 shows the relevant portion of the
graph that determines the sequence of system calls that are permitted
by the intrusion detection system. The first read system call
corresponds to the reading of the password (on line 23), while the
execve call corresponds to the execution of the command obtained
from the file (on line 30). Note the two possible sequences that
result because commands can be either logged or not.
Figure 8:
First vulnerable program.
|
It can be seen that the program suffers from a simple buffer overflow
vulnerability in the check_pw() function (on line 8). This
allows an attacker to inject code and to redirect the control flow to
an arbitrary location.
One possibility to redirect control would be directly after the check of the password, before the call
to the fgets() function (on line 26). However, in doing so, the
attacker can not modify the command that is being executed because
fgets() is used to retrieve the command. One solution to this problem
could be to first modify the content of the command buffer cmd,
and then jump directly to the setuid() function, bypassing the
part that reads the legitimate command from the file. By doing so,
however, an alarm is raised by the intrusion detection system that
observes an invalid setuid system call while expecting a read. To perform a classic mimicry attack, the intruder could simply
issue a bogus read call, but, in our case, such a call would be
identified as illegal as well. The reason is that the source of the
system call would not be the expected instruction in the application
code.
Figure 9:
Fragment of automaton that captures permitted system call
sequences.
|
To exploit this program such that an arbitrary command can be
executed in spite of the checks performed by the intrusion detection
system, it is necessary to regain control after the call to fgets(). In this case, the attacker could replace the name of the
command and then continue execution with the setuid() library
function. To this end, our symbolic execution engine is used to
determine a configuration that allows the attacker to recover control
after the fgets() call. For the first example, a simple
configuration is sufficient in which enable_logging is set to
and the shared library call to printf() is replaced with a
jump to the attacker code. With this configuration, the conditional
branch (on line 27) is taken, and instead
of calling printf(), control is passed to the attacker
code. This code can then change the cmd parameter of the subsequent execve() call (on line 30) and continues execution of the original
program on line 29. Note that the intrusion detection system is evaded
because all system calls are issued by instructions in the application
code segment and appear in the correct order.
The buffer overflow in check_pw() is used to inject the exploit
code that is necessary to set up the environment. After the
environment is prepared, control is returned to the original
application before fgets(), bypassing the password check
routine. Our system is generating actual exploit code that handles the
setup of a proper configuration. Thus, this and the following example
programs were successfully exploited by regaining control and changing
the command that was executed by execl(). In all cases, the
attacks remained undetected by the used intrusion detection
systems [4,14].
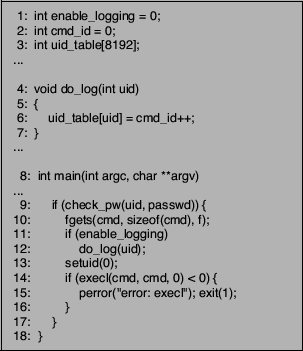
As a second example, consider a modified version of the initial
program as shown in Figure 10. In this example, the call to
printf() is replaced with the invocation of the custom audit
function do_log(), which records the identifier of the last
command issued by each user (with uid  ). To this end, a
unique identifier called cmd_id is stored in a table that is
indexed by uid (on line 6). ). To this end, a
unique identifier called cmd_id is stored in a table that is
indexed by uid (on line 6).
Figure 10:
Second vulnerable program.
|
For this example, the application was statically linked so that we
cannot intercept any shared library calls. As for the previous
program, the task is to recover control after the fgets() call on line
10. Our symbolic execution engine successfully determined that the
assignment to the array on line 6 can be used to overwrite the return
address of do_log(). To do so, it is necessary to assign a
value to the local variable uid so that when this value is
added to the start address of the array uid_table, the
resulting address points to the location of the return address of do_log(). Note that our system is capable of tracking function calls
together with the corresponding parameters. In this example, it is
determined that the local variable uid is used as a parameter
that is later used for the array access. In addition, it is necessary
to store the address of the attack code in the variable cmd_id
and turn on auditing by setting enable_logging to a value  . .
One might argue that it is not very realistic to store identifiers in
a huge table when most entries are . Thus, for the third program
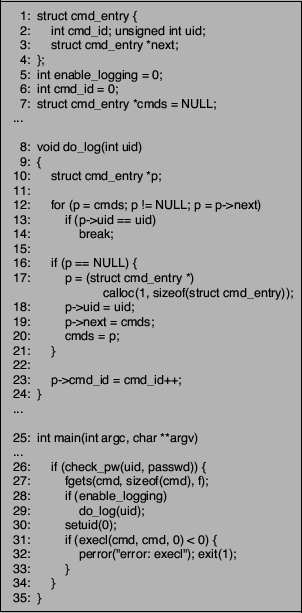
shown in Figure 11, we have replaced the array with a list. In
this example, the do_log() function scans a linked list for a
record with a matching user identification (on lines 12-14). When an
appropriate record already exists, the cmd_id field of the cmd_entry structure is overwritten with the global command
identifier cmd_id. When no suitable record can be found, a new
one is allocated and inserted at the beginning of the list (on lines
16-21).
Figure 11:
Third vulnerable program.
|
When attempting to find a suitable instruction to direct control flow
back to the attacker code, the operation on line 23 seems
appropriate. The reason is that this statement assigns the global
variable cmd_id to the field of a structure that is referenced
by the pointer variable p. Unfortunately, p is not under
direct control of the attacker. This is because in the initialization
part of the for-loop on line 12, the content of the pointer to
the global list head cmds is assigned to p. In addition,
the loop traverses the list of command records until a record is found
where the uid field is equivalent to the single parameter (uid) of the do_log() function. If, at any point, the next pointer of the record pointed to by p is NULL, the
loop terminates. Then, a freshly allocated heap address is assigned to
p on line 17. When this occurs, the destination of the
assignment statement on line 23 cannot be forced to point to the
function return address anymore, which is located on the stack.
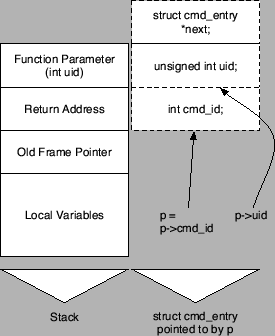
Figure 12:
Successful return address overwrite via p.
|
The discussion above underlines that even if a pointer assignment is
found, it is not always clear whether this assignment can be used to
overwrite a return address. For this example, our symbolic execution
engine discovered a possibility to overwrite the return address of
do_log(). This is achieved by preparing a configuration in
which the cmds variable points directly to the return address of
do_log(). After the content of cmds is assigned to p, p uid is compared to the uid parameter on
line 13. Because of the structure of the cmd_entry record, this
comparison always evaluates to true. To see why this is the
case, refer to Figure 12. The figure shows that when p points to the function's return address, puid
points to the location that is directly ``above'' this address in
memory. Because of the x86 procedure calling convention, this happens
to be the first argument of the do_log() function. In other
words, puid and the parameter uid refer to
the same memory location, therefore, the comparison has to evaluate to
true. As before, for a successful overwrite, it is necessary to
set the value of cmd_id to and enable auditing by assigning
to enable_logging. uid is compared to the uid parameter on
line 13. Because of the structure of the cmd_entry record, this
comparison always evaluates to true. To see why this is the
case, refer to Figure 12. The figure shows that when p points to the function's return address, puid
points to the location that is directly ``above'' this address in
memory. Because of the x86 procedure calling convention, this happens
to be the first argument of the do_log() function. In other
words, puid and the parameter uid refer to
the same memory location, therefore, the comparison has to evaluate to
true. As before, for a successful overwrite, it is necessary to
set the value of cmd_id to and enable auditing by assigning
to enable_logging.
Without the automatic process of symbolic execution, such an
opportunity to overwrite the return address is probably very difficult
to spot. Also, note that no knowledge about the x86 procedure calling
convention is encoded in the symbolic execution engine. The
possibility to overwrite the return address, as previously discussed, is
found directly by (symbolically) executing the machine instructions of
the binary. If the compiler had arranged the fields of the cmd_entry structure differently, or if a different calling
convention was in use, this exploit would not have been found.
For the second experiment, we used our symbolic execution tool on
three well-known applications: apache2, the netkit ftpd server, and imapd from the University of Washington. The
purpose of this experiment was to analyze the chances of an attacker
to recover control flow in real-world programs. To this end, we
randomly selected one hundred addresses for each program that were
evenly distributed over the code sections of the analyzed
binaries. From each address, we started the symbolic execution
processes. The aim was to determine whether it is possible to find a
configuration and a sequence of instructions such that control flow
can be diverted to an arbitrary address. In the case of a real attack,
malicious code could be placed at this address. Note that all
applications were dynamically linked (which is the default on modern
Unix machines).
Table 1:
Symbolic execution results for real-world applications.
| Program |
Instr. |
Success |
Failed |
| |
|
|
Return |
Exhaust |
| apache2 |
51,862 |
83 |
12 |
5 |
| ftpd |
9,127 |
93 |
7 |
0 |
| imapd |
133,427 |
88 |
11 |
1 |
|
Table 1 summarizes the results for this experiment. For
each program, the number of code instructions (column ``Instr.'') are
given. In addition, the table lists the number of test cases for which
our program successfully found a configuration (column ``Success'') and the
number of test cases for which such a configuration could not be found
(column ``Failed'').
In all successful test cases, only a few memory locations had to be
modified to obtain a valid configuration. In fact, in most cases, only
a single memory location (a function address in the PLT) was changed.
The code that is necessary to perform these modifications is in the
order of 100 bytes and can be easily injected remotely by an attacker
in most cases.
A closer examination of the failed test cases revealed that a
significant fraction of these cases occurred when the symbolic
execution thread reached the end of the function where the start
address is located (column ``Return''). In fact, in several cases,
symbolic execution terminated immediately because the randomly chosen
start address happened to be a ret instruction. Although the
symbolic execution engine simulates the run-time stack, and thus can
perform function calls and corresponding return operations, a return
without a previous function call cannot be handled without additional
information. The reason is that whenever a symbolic execution thread
makes a function call, the return address is pushed on the stack and
can be used later by the corresponding return operation. However, if
symbolic execution begins in the middle of a function, when this initial function completes, the
return address is unknown and the thread terminates.
When an intruder is launching an actual attack, she usually possesses
additional information that can be made available to the analysis
process. In particular, possible function return addresses can be
extracted from the program's call graph or by examining (debugging) a
running instance of the victim process. If this information is
provided, the symbolic evaluation process can continue at the given
addresses. Therefore, the remaining test cases (column ``Exhaust'') are of
more interest. These test instances failed because the symbolic execution
process could not identify a possibility to recover control flow. We
set a limit of 1,000 execution steps for each thread. After that,
a thread is considered to have exhausted the search space and it is
stopped. The reason for this limit is twofold. First, we want to force
the analysis to terminate. Second, when the step limit is reached,
many memory locations and registers already contain unknown values.
Our results indicate that only a small amount of test cases failed
because the analysis engine was not able to identify appropriate
configurations. This supports the claim that our proposed evasion
techniques can be successfully used against real-world applications.
Table 2:
Execution steps and time to find configurations.
| Program |
Steps |
Time |
| |
Avg. |
Max. |
Min. |
(in seconds) |
| apache2 |
24 |
131 |
0 |
12.4 |
| ftpd |
7 |
62 |
0 |
0.3 |
| imapd |
46 |
650 |
0 |
1.2 |
|
Table 2 provides more details on the number of steps
required to successfully find a configuration. In this table, the
average, maximum, and minimum number
of steps are given for the successful threads. The results show that, in
most cases, a configuration is found quickly, although
there are a few outliers (for example, 650 steps for one imapd
test case). Note that all programs contained at least one case for
which the analysis was immediately successful. In these cases, the
random start instruction was usually an indirect jump or indirect call
that could be easily redirected.
The table also lists the time in
seconds that the symbolic execution engine needed to
completely check all hundred start addresses (successful and failed
cases combined) for each program. The run time for
each individual test case varies significantly, depending on the
amount of constraints that are generated and the
branching factor of the program. When a program contains many
branches, the symbolic execution process has to follow many different
threads of execution, which can generate an exponential path explosion
in the worst case. In general, however, the run time is not a
primary concern for this tool and the results demonstrate that the system
operates efficiently on real-world input programs.
6 Conclusions
In this paper, we have presented novel techniques to evade two
well-known intrusion detection
systems [4,14] that monitor system
calls. Our techniques are based on the idea that application control
flow can be redirected to malicious code after the intruder has
passed control to the application to make a system call. Control is
regained by modifying the process environment (data, heap, and stack
segment) so that the program eventually follows an invalid code
pointer (a function return address or an indirect control transfer
operation). To this end, we have developed a static analysis tool for
x86 binaries, which uses symbolic execution. This tool automatically
identifies instructions that can be used to redirect control flow. In
addition, the necessary modification to the environment are computed
and appropriate code is generated. Using our system, we were able to
successfully exploit three sample programs, evading state-of-the-art
system call monitors. In addition, we applied our tool to three
real-world programs to demonstrate the general applicability of our
techniques.
The static analysis mechanisms that we developed for this paper
could be used for a broader range of binary analysis problems in the
future. One possible application is the identification of
configurations for which the current function's return address is overwritten. This might allow
us to build a tool that can identify buffer overflow vulnerabilities
in executable code. Another application domain is the search for viruses. Since
malicious code is usually not available as source code, binary analysis is a
promising approach to deal with this problem. In addition, we hope
that our work has brought to attention the intrinsic problem of defense
mechanisms that allow attackers a large amount of freedom in their
actions.
This research was supported by the National Science Foundation under grants
CCR-0209065 and CCR-0238492.
- 1
-
R. Bagnara, E. Ricci, E. Zaffanella, and P. M. Hill.
Possibly not closed convex polyhedra and the Parma Polyhedra
Library.
In 9th International Symposium on Static Analysis, 2002.
- 2
-
P. Cousot and R. Cousot.
Abstract Interpretation: A Unified Lattice Model for Static Analysis
of Programs by Construction or Approximation of Fixpoints.
In 4th ACM Symposium on Principles of Programming Languages
(POPL), 1977.
- 3
-
H. Feng, J. Giffin, Y. Huang, S. Jha, W. Lee, and B. Miller.
Formalizing sensitivity in static analysis for intrusion detection.
In IEEE Symposium on Security and Privacy, 2004.
- 4
-
H. Feng, O. Kolesnikov, P. Fogla, W. Lee, and W. Gong.
Anomaly detection using call stack information.
In IEEE Symposium on Security and Privacy, 2003.
- 5
-
S. Forrest.
A Sense of Self for UNIX Processes.
In IEEE Symposium on Security and Privacy, 1996.
- 6
-
D. Gao, M. Reiter, and D. Song.
Gray-Box Extraction of Execution Graphs for Anomaly Detection.
In 11th ACM Conference on Computer and Communication Security
(CCS), 2004.
- 7
-
D. Gao, M. Reiter, and D. Song.
On Gray-Box Program Tracking for Anomaly Detection.
In 13th Usenix Security Symposium, 2004.
- 8
-
J. Giffin, S. Jha, and B. Miller.
Detecting Manipulated Remote Call Streams.
In 11th Usenix Security Symposium, 2002.
- 9
-
J. Giffin, S. Jha, and B.P. Miller.
Efficient context-sensitive intrusion detection.
In 11th Network and Distributed System Security Symposium
(NDSS), 2004.
- 10
-
J. King.
Symbolic Execution and Program Testing.
Communications of the ACM, 19(7), 1976.
- 11
-
L. Lam and T. Chiueh.
Automatic Extraction of Accurate Application-Specific Sandboxing
Policy.
In Symposium on Recent Advances in Intrusion Detection (RAID),
2004.
- 12
-
T. Lengauer and R. Tarjan.
A Fast Algorithm for Finding Dominators in a Flowgraph.
ACM Transactions on Programming Languages and Systems, 1(1),
1979.
- 13
-
F. Nielson, H. Nielson, and C. Hankin.
Principles of Program Analysis.
Springer Verlag, 1999.
- 14
-
R. Sekar, M. Bendre, D. Dhurjati, and P. Bollineni.
A fast automaton-based method for detecting anomalous program
behaviors.
In IEEE Symposium on Security and Privacy, 2001.
- 15
-
K. Tan, K. Killourhy, and R. Maxion.
Undermining an Anomaly-Based Intrusion Detection System Using Common
Exploits.
In 5th Symposium on Recent Advances in Intrusion Detection
(RAID), 2002.
- 16
-
D. Wagner and D. Dean.
Intrusion Detection via Static Analysis.
In IEEE Symposium on Security and Privacy, 2001.
- 17
-
D. Wagner and P. Soto.
Mimicry Attacks on Host-Based Intrusion Detection Systems.
In 9th ACM Conference on Computer and Communications Security
(CCS), 2002.
- 18
-
C. Warrender, S. Forrest, and B.A. Pearlmutter.
Detecting intrusions using system calls: Alternative data models.
In IEEE Symposium on Security and Privacy, 1999.
- 19
-
A. Wespi, M. Dacier, and H. Debar.
Intrusion Detection Using Variable-Length Audit Trail Patterns.
In Recent Advances in Intrusion Detrection (RAID), 2000.
- 20
-
H. Xu, W. Du, and S. Chapin.
Context Sensitive Anomaly Monitoring of Process Control Flow to
Detect Mimicry Attacks and Impossible Paths.
In Symposium on Recent Advances in Intrusion Detection (RAID),
2004.
Automating Mimicry Attacks Using Static Binary Analysis
This document was generated using the
LaTeX2HTML translator Version 2002-2 (1.70)
Copyright © 1993, 1994, 1995, 1996,
Nikos Drakos,
Computer Based Learning Unit, University of Leeds.
Copyright © 1997, 1998, 1999,
Ross Moore,
Mathematics Department, Macquarie University, Sydney.
The command line arguments were:
latex2html -split 0 -show_section_numbers -local_icons attack.tex
The translation was initiated by on 2005-05-12
2005-05-12
|