Device drivers constitute over half of the source code of many operating system kernels, with a bug rate up to seven times higher than other kernel code [10]. They are often written by outside developers, and they are less rigorously examined and tested than the rest of the kernel code. Yet device drivers are part of the trusted computing base (TCB) of every application, because the monolithic architecture of mainstream operating systems forces device drivers to be executed inside the kernel, with high privilege. Some microkernels and other research operating systems [2,9,24,21] run device drivers in user space to isolate the operating system from accidental driver faults, but these drivers retain sufficient I/O privileges that they must still be trusted.
This paper introduces a practical mechanism for executing device drivers in user space and without privilege. Specifically, device drivers are isolated using hardware protection boundaries. Each device driver is given access only to the minimum resources and operations necessary to support the devices it controls (least privilege), thereby shrinking the TCB.2 A system in which device drivers have minimal privileges is easier to audit and less susceptible to Trojans in third-party device drivers.
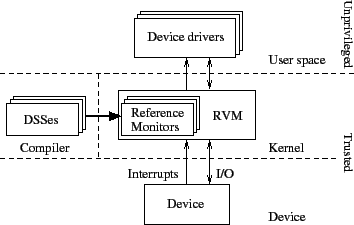
Even in user space, device drivers execute hardware I/O operations and handle interrupts. These operations can cause device behavior that compromises the integrity or availability of the kernel or other programs. Therefore, our driver architecture introduces a global, trusted reference validation mechanism (RVM) [3] that mediates all interaction between device drivers and devices. The RVM invokes a device-specific reference monitor to validate interactions between a driver and its associated device, thereby ensuring the driver conforms to a device safety specification (DSS), which defines allowed and, by extension, prohibited behaviors.
The DSS is expressed in a domain-specific language and defines a state machine that accepts permissible transitions by a monitored device driver. We provide a compiler to translate a DSS into a reference monitor that implements the state machine. Every operation by the device driver is vetted by the reference monitor, and operations that would cause an illegal transition are blocked. The entire architecture is depicted in Figure 1.
The RVM protects the integrity, confidentiality, and availability of the system, by preventing:
One alternative to our approach for monitoring and constraining device driver behavior is to use hardware capable of blocking illegal operations. Hardware-based approaches, however, are necessarily limited to policies expressed in terms of hardware events and abstractions. An IOMMU [4,1,14,23], for example, can limit the ability of devices to perform DMA transfers to or from physical addresses the associated drivers cannot read or write directly. IOMMUs, however, do not mediate aspects of driver and system safety that go beyond the memory access interface [7]; for example, an IOMMU cannot prevent interrupt livelock, limit excessively long interrupt processing, protect devices from physical harm by drivers, or enforce site-specific policies. As IOMMUs become prevalent, our approach could leverage them as hardware accelerators for memory protection.
In sum, this paper shows how to augment common memory protection techniques with device-specific reference monitors to execute drivers with limited privilege and in user space. The requisite infrastructure is small, easy to audit, and shared across all devices. Our prototype implementation demonstrates that this approach can defend against malicious drivers and that the performance costs of this enhanced security are not prohibitive.
Device drivers send commands to devices, check device status using registers, receive notification of status changes through interrupts, and initiate bulk data transfers using direct memory access (DMA). How they do so constitutes a platform's I/O model. Our work is targeted to the x86 architecture and PCI buses; what follows is a brief overview of the I/O model on that platform. Similar features are found on other processors and buses.
Modern buses implement device enumeration and endpoint identification. Each device on a PCI bus is identified by a 16-bit vendor identifier and a 16-bit model number; the resulting 32-bit device identifier identifies the device.3 Some devices with different model numbers may nonetheless be similar enough to share a single driver and a single DSS. Device enumeration is a process for identifying all devices attached to a bus; endpoint identification is the process of querying a device for its type, capabilities, and resource requirements.
Device enumeration and endpoint identification typically occur at boot time. Interrupt lines and I/O registers are assigned, according to device requests, to all devices discovered. Device identifiers govern which device drivers to load. Unrecognized devices, for which no DSS is available, are ignored and are not available to drivers.
Devices have registers, which are read and written by drivers to get status, send commands, and transfer data. The registers comprise I/O ports (accessed using instructions like inb and outb), memory-mapped I/O, and PCI-configuration registers. Each register is identified by a type and an address. Contiguous sets of registers constitute a range, identified by type, base address, and limit (the number of addresses in the range). For all register types, accesses are parameterized by an address, a size, and, for writes, a value of the given size. Write operations elicit no response; read operations produce a value of the given size as a response. Both operations can cause side effects on a device.
Devices that transfer large amounts of data typically employ DMA rather than requiring a device driver to transfer each word of data individually through device registers. Before initiating a DMA transfer, the device driver typically sets a control register on the device to point to a buffer in memory. Some devices can perform DMA to or from multiple memory locations; in this case, a control register might contain a pointer to a list, ring, or tree structure with pointers to many buffers. Device drivers using DMA transfers must first obtain from the kernel one or more memory regions with known, fixed, physical addresses.
Devices can be synchronous or asynchronous. Drivers must poll synchronous devices for completed operations or changes in status. In contrast, when a driver submits an operation to an asynchronous device, the driver yields the CPU until the device later signals its response (or other status change) by interrupting the processor. When that interrupt occurs, the operating system invokes code specified by the driver. In most cases, an interrupt must be acknowledged by a driver, or the device will continue to send the same interrupt. Interrupts can be prioritized relative to each other, but they generally occur with a high priority, preempting most other tasks.
Each device signals interrupts using a pre-assigned interrupt line. On some architectures, including the x86, interrupt lines can be shared by multiple devices. Drivers must read status registers for each of these devices to determine which specific device caused the interrupt.
Devices are assumed to be in an unknown state when an operating system boots or when a driver is loaded or reloaded. When a driver is unloaded, it unregisters its interrupt handler and releases its DMA memory. At that point, the device must be placed in a state that does not generate interrupts or use DMA.
Devices are typically forgiving about device driver timing, and device drivers are similarly forgiving about device timing. This flexibility is a necessity, because a modern multitasking operating system might be heavily loaded, implement arbitrary scheduling policies, or at times execute with interrupts disabled. In addition, devices and their drivers typically work with several processor generations, which differ in execution speed. Device registers and interrupts, rather than precise timing, are used to implement synchronization between the device and its driver so that devices and drivers behave safely and predictably despite uncertain delays.
Some drivers are divided into components or hierarchies. For example, SCSI, ATA, and USB each have a controller driver plus additional drivers for peripherals, like disks, mice, keyboards, etc. In the general case, any driver in such a driver hierarchy can issue requests and handle interrupts. Applying a reference monitor in such a driver hierarchy requires the reference monitor to securely identify attached devices, demultiplex the commands passing through the controller, and recognize the protocol used with each device--all feasible with our current language.4 However, in all driver hierarchies we have examined, only the device driver for the controller performs low-level I/O operations, handles interrupts, or initiates DMA transfers, and drivers for peripherals communicate with their devices through the controller driver. Hence, all communication is visible to a single reference monitor, which suffices to validate the operations of all drivers in the hierarchy.
Some devices, particularly high-performance network cards and 3-D graphics cards, support loading and executing programs (e.g., for TCP offload or vertex shading) on a processor on the device. Other devices may support loading firmware, either ephemerally or permanently. Such programs and firmware change the way the device behaves; thus, they must be trustworthy. Programs and firmware are loaded through I/O operations or DMA, both of which can be monitored. In principle, then, an RVM could authenticate device programs or firmware using signatures or other analysis. Our current DSSes do not implement these checks. Doing so would be straightforward, though designing an analysis algorithm for such updates might not be.
In our user-space driver architecture, drivers, like any other user process, are loaded from a filesystem; once loaded, they execute and can be unloaded and restarted at any time. When a driver is first loaded, it executes a system call to find a compatible device. As part of this system call execution, the RVM identifies an appropriate device and reference monitor and returns to the driver a structure describing the device ID and I/O-resource assignments. The driver then uses driver system calls (described in Section 4.3) to perform I/O operations and receive interrupts. Subsequent uses of those calls cause the RVM to invoke the reference monitor.
Reference monitors are instantiated immediately after endpoint enumeration, based on device IDs. Reference monitors persist, even if corresponding drivers are unloaded and restarted.
Drivers are not trusted, but the RVM, reference monitors, and devices are. Moreover, reference monitors are compiled from DSSes, so DSSes and the DSS compiler must be trusted.
Some DSSes will be written by hardware manufacturers; others will be written by independent experts, including security firms or OS distributors. But independent of the source, a DSS ought to be small and declarative. Further, because they describe devices, not drivers, there need only be one DSS per device. Hence, they are conducive to auditing.
We assume devices behave safely if given sufficiently restricted inputs. Such an assumption is inescapable, because devices can access any memory, generate arbitrary interrupts, and starve hardware buses directly.
The two sources of driver misbehavior we consider are drivers designed by malicious authors (Trojans), and drivers with bugs that can be subverted by users or remote attackers. Both are dealt with by our RVM.
The RVM prevents drivers from performing invalid reads and writes using hardware isolation and by checking driver accesses to DMA control registers.
The RVM must also defend against a device driver that attempts to escalate its execution priority or that starves other processes and the kernel by causing large numbers of interrupts or by spending too much time in high-priority interrupt handlers. A timer driver might set too high a timer frequency, or a sound card driver might set too small a DMA buffer for playback, causing frequent notifications to be generated when the buffer becomes empty. Some of these unacceptable behaviors can be prevented when the driver is setting up the device--for example, by a reference monitor imposing a lower bound on the sound card DMA buffer size--but RVMs provide three additional protection measures. First, the RVM limits the frequency at which a driver can receive interrupts, with different limits for different types of devices. Second, the RVM limits the length of time that an interrupt handler runs. Third, the RVM ensures that each interrupt handler acknowledges every interrupt, to prevent devices from issuing additional interrupts for the same event. (The details of monitoring interrupt handlers in our Nexus implementation are described in Section 4.1.)
Finally, an RVM must prevent invocations of operations known or suspected to harm devices. Examples include: overclocking processors, sending a monitor an out-of-range refresh rate, instructing a disk to seek to an invalid location, or writing invalid data to non-volatile configuration registers. Other attacks against devices involve exhausting finite resources, such as wearing out flash memory with excessive writes or wasting battery power on mobile devices. The RVM prevents many such attacks by allowing only well-defined operations at rates presumed to be safe.
While the RVM approach is general enough to enforce rich safety properties, we do not anticipate that RVMs will be used to enforce driver semantics expected by applications. Our reference monitor implementations do not, for example, ensure that network drivers only send legal TCP packets. They also do not prevent a malicious driver from providing incorrect or incomplete access to a device (i.e. denial of service). Such protections concern end-to-end properties, hence we believe that they are best implemented above the driver level.
Each DSS describes the states and transitions for a state machine and is compiled to create a reference monitor. Inputs to the reference monitor--operations executed by a driver and events from the corresponding device--are delivered serially to the reference monitor by the RVM. When an input does not correspond to an allowable transition, then the reference monitor deems it illegal, the RVM terminates the driver for the corresponding device, and the device is reset.
The state of a DSS state machine records interesting aspects of the history of operations and events. This state is defined in terms of state variables, and it often correlates with the state of the I/O device itself. Some of these state variables are explicitly defined by the program; others are implicitly defined by the RVM.
Implicitly defined state variables are given values by the RVM as a result of registration events (see Section 4.1). The implicit variables $PORTIO[], $MMIO[], $PCIREG[], and $INTR[] identify I/O registers and interrupt lines set during endpoint identification. And $MONITORED[] and $UNMONITORED[] describe two types of memory regions allocated by the driver, both of which may be used for DMA transfers. Access to a monitored memory location generates an input to the reference monitor, similar to device registers; this form of memory is used to store commands or pointers to other DMA regions. Access to an unmonitored memory location is not visible to the RVM, making unmonitored memory suitable only for DMA buffers containing data irrelevant to the DSS, such as audio samples from a sound card. Unmonitored reads and writes are considerably faster than monitored reads and writes.
Each state machine transition is specified with a predicate ![]() and an
action
and an
action ![]() .
. ![]() is a boolean expression over events and state
variables.
is a boolean expression over events and state
variables. ![]() is a program fragment that modifies state variables to
produce the new state. A transition that pairs a predicate
is a program fragment that modifies state variables to
produce the new state. A transition that pairs a predicate ![]() and an
action
and an
action ![]() is written using the syntax
is written using the syntax ![]() {
{ ![]() }.5
}.5
Any operation or event--though this is most useful for interrupts--can
be assigned a rate limit as part of a DSS. Rate limits can be manually
incorporated into transitions using counters and timers. As a
convenience, the notation ![]() <
<![]() ,
, ![]() ,
,
![]() > {
> { ![]() } compiles to a transition with a leaky
bucket expressing a rate limit. So, the associated transition can occur
at most
} compiles to a transition with a leaky
bucket expressing a rate limit. So, the associated transition can occur
at most ![]() times per second; bursts are allowed beyond this rate, up
to
times per second; bursts are allowed beyond this rate, up
to ![]() occurrences at once; when the driver starts, it has
occurrences at once; when the driver starts, it has ![]() initial capacity.
initial capacity.
As an example, an abridged version of our DSS for the Intel i810 audio device appears in the Appendix.
We instantiated our user-level device driver architecture in the Nexus trusted operating system [28], which has many similarities to traditional microkernels, including hardware-implemented process isolation. Other operating systems that support process isolation (e.g., Linux or Windows) could also host an RVM.
Our implementation of user-space, unprivileged device drivers in Nexus includes the RVM, an event interface between the RVM and the reference monitor, a system call interface by which drivers can request services from the RVM, and a mechanism for limiting driver execution time and the frequency of events. We discuss each of these below and report on our experience porting Linux kernel device drivers to Nexus user space.
Reference monitors define functions that the RVM calls to initialize implicit state variables and to deliver inputs to be checked. These inputs are sent in response to driver system calls and device events. Each I/O operation and event described in Section 2 causes a distinct input.
A driver can allocate memory to use for DMA, which causes the RVM to send register_region events with a region type of MONITORED or UNMONITORED. Finally, if the driver exits or executes an operation not permitted by the DSS, the RVM sends a reset event.
Devices affect reference monitor state when sending interrupts, which generate intr events. When an interrupt occurs, the reference monitor sets an interrupt status flag (each reference monitor maintains one such flag per interrupt line) to pending, and the RVM schedules the driver with high execution priority. The driver then has a configurable amount of time to respond to the interrupt, by checking if the interrupt was from its device, and if so, acknowledging it so the device does not generate more interrupts for the same device event. This check and acknowledgment are implemented with I/O device read and write operations; reference monitors recognize them as transitions and reset the interrupt status flag to idle. Then, the RVM lowers the driver's execution priority to its default level. If the driver does not check and acknowledge the interrupt before the allowed time has elapsed,6 the RVM infers a starvation attack, terminates the driver, and resets the device.
When an interrupt occurs on a shared line, the RVM notifies all drivers on that line. The RVM monitors the handlers to ensure that each driver checks its device's interrupt status and acknowledges the interrupt if necessary. This approach correctly handles merged interrupts, where two or more devices generate an interrupt at the same time, as well as spurious interrupts.
The RVM could impose rate limits on uncooperative drivers directly or by terminating a driver when its associated device exceeds the limit. We implement the latter in Nexus. If an RVM can mask interrupts from each device independently (e.g., as with non-shared interrupts or edge- or message-signaled interrupts), then the RVM could limit the interrupt rate by masking interrupts that would exceed a rate limit. However, for shared, level-triggered interrupt lines, this approach delays interrupts for all drivers sharing the line. Since limits cannot be enforced by masking these interrupts, the driver associated with a device that violates rate limits must be terminated.
To ensure that rate limits are applied fairly to interrupts on shared lines, only acknowledged interrupts are counted. The RVM determines from reference monitor state how each driver handled an interrupt--by deciding it was for a different driver, or by acknowledging it.
Rather than write new drivers for Nexus, we used drivers from Linux 2.4.22.7 Our original goal was source compatibility between these Linux drivers and Nexus user space drivers. However, the Linux drivers did not provide some of the information necessary to enforce a DSS efficiently. Moreover, small changes to driver source code promised to reduce our overall effort in porting Linux drivers to Nexus and to make the resulting Nexus drivers more efficient. So we used a hybrid approach, implementing general-purpose compatibility functions for Linux drivers and also changing Linux driver code to work better with an RVM. The compatibility functions provide user-space equivalents of global variables and functions in the Linux kernel that Linux drivers would normally access directly.
Linux drivers read and write DMA memory by dereferencing pointers or by calling functions like memcpy. We map monitored DMA memory to invalid pages so that accessing it causes page faults. A trap handler redirects these page faults to driver_read and driver_write system calls. System calls are faster than page faults (see Section 5.1), so programmers may change monitored DMA memory operations to explicit system calls wherever performance is critical.
Memory used for DMA operations must be pinned: it must have a fixed physical address and cannot be paged to the disk. Pinned memory is more expensive to maintain and has a stricter quota than normal heap memory. While a driver can allocate DMA memory at any time, that memory is only freed when the driver exits. To allow an active driver to free DMA memory, the RVM would need to ensure the device will not access the memory in the future. Freeing DMA memory also leads to fragmentation, which makes all subsequent checks of pointers to DMA memory more expensive. We chose to allow freeing DMA memory upon driver exit (after the device has been reset) for simplicity and performance. Fortunately, in practice, all the Linux drivers we ported except the USB controller driver already behave this way; we easily modified the USB driver to do the same.
Fortunately, typical drivers need only non-reentrant code sections, which we implement by deferring the driver's interrupts and pausing its other threads. When a driver thread enters a non-reentrant section, the Nexus scheduler marks all other threads associated with the driver as not runnable; the kernel and other processes are unaffected. Interrupts for this driver are delayed until it finishes the non-reentrant section, as they would be with interrupts disabled in hardware.8 In this approach, the driver does not have exclusive control of the CPU, but it avoids being called in a reentrant manner by concurrent invocations or by interrupts.
Our implementation of deferred interrupts may cause problems for drivers that require precise timing. For example, the Linux i810 sound card driver calibrates playback speed by measuring playback progress over a fixed-length period during initiation. Such precise scheduling can be viewed as a privilege that drivers do not need. We rewrote the sound driver to measure the interval over which its calibration routine ran rather than using a fixed-length period; precisely measuring time in user space requires no special privileges.
We implemented user-space device drivers for the i810 sound card, e1000 network card, USB UHCI controllers, USB mice, and USB disks in Nexus. Here, we quantify the performance, robustness, and complexity of these drivers, their DSSes, and the Nexus RVM.
We quantify the ease of driver porting and the auditability of DSSes by counting the number of lines of code in each DSS and the number of lines changed to port each Linux driver to Nexus. These counts are given in Figure 2. We distinguish between lines we modified in the Linux driver files and lines we added in new files. The number of changed and added lines was small, and as expected, each DSS is dramatically smaller than the corresponding driver. Our DSSes are similar in size to descriptions of network devices in Devil [25] and to the safety annotations applied to drivers in Spec# [8].
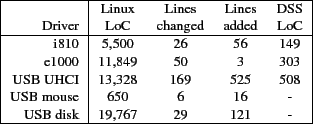 |
We wrote each DSS by referring to the manufacturer's documentation about device behavior and to existing drivers. The DSS for USB UHCI was derived entirely from the documentation. The i810 and e1000 DSSes are based on documentation that describes features our drivers actually use; other features are disallowed by the DSS. Writing a DSS based on an existing driver is tempting, but risks disqualifying other drivers that attempt different (but safe) behavior. Writing a DSS based on all features described in published documentation is more time-consuming, but in theory, it admits any legal driver. Based on our experience, we estimate the time to develop a DSS, given a working driver, manufacturer's documentation, and familiarity with the DSS language but not with the device, as one to five days.
To gain insight into the performance of our user-space device drivers, we tested each at idle and under load. Our test system was a 3.0 GHz Pentium 4 system dual-booting Nexus and Linux 2.4.22. For network tests, the remote host was a 2.4 GHz Athlon 64 X2 system running Linux 2.6.22, connected over a switched, lightly loaded 1 Gbps network.
To obtain a detailed breakdown of the sources of overhead, we instrumented several versions of the e1000 network driver and the i810 sound driver:
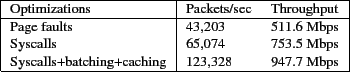
The Unsafe, Nullspec, and Safe drivers for the e1000 include some simple optimizations:
 |
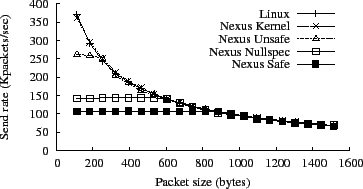 |
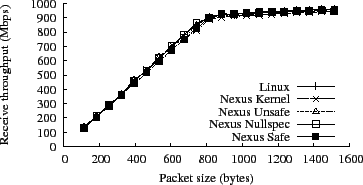
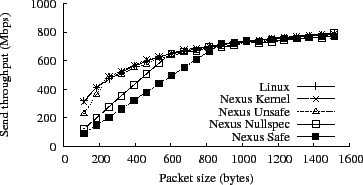
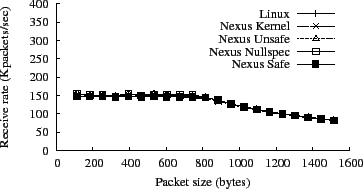
To test bulk data throughput of the e1000 driver, we sent UDP packets at 1 Gbps to and from a Linux host running Iperf [32]. We varied the size of each packet from 100 bytes to 1470, in order to find the limits of packet-processing rate and data rate. Figures 4 and 5 show the performance, in Mbps and in thousands of packets per second, for all versions of the e1000 driver. All five versions of the e1000 driver performed identically when receiving packets. The three user-space drivers--Unsafe, Nullspec, and Safe--show somewhat degraded performance when sending packets smaller than 800 bytes. The user-space drivers take longer to handle interrupts, and sending generates more interrupts than receiving because the e1000 driver receives (but does not send) many packets per interrupt under heavy load.
To measure interrupt handling times, we instrumented the interrupt
handler for the i810 driver. This test uses the CPU cycle counter for
nanosecond timing, with instrumentation added to the kernel's trap function
(where an interrupt is first visible to software) and to the exit point
of the interrupt handler. Average interrupt processing time, over 120
samples, was ![]() s for Linux,
s for Linux, ![]() s for Kernel,
s for Kernel,
![]() s for Unsafe,
s for Unsafe, ![]() s for Nullspec, and
s for Nullspec, and
![]() s for Safe. So, the user-space interrupt handlers took
three to five times as long as the in-kernel Nexus drivers.
This slowdown is not unexpected, because user-space handlers require a
scheduler invocation and two or more context switches.
s for Safe. So, the user-space interrupt handlers took
three to five times as long as the in-kernel Nexus drivers.
This slowdown is not unexpected, because user-space handlers require a
scheduler invocation and two or more context switches.
A macrobenchmark for network round-trip time, which includes driver
response time, is the ping command, which sends an ICMP echo request
packet and receives an ICMP echo reply packet in return. The replies are
normally generated by the remote kernel, resulting in low latencies. The
elapsed time between sending the request and receiving the reply is the
network round-trip time plus the time required for the remote host to
process the request. We measured ping times from a Linux box to a Nexus
box running each of the four test e1000 drivers. The average round-trip
time, over 100 packets, was ![]() s for Kernel,
s for Kernel, ![]() s for
Unsafe,
s for
Unsafe, ![]() s for Nullspec, and
s for Nullspec, and ![]() s for Safe.
s for Safe.
 |
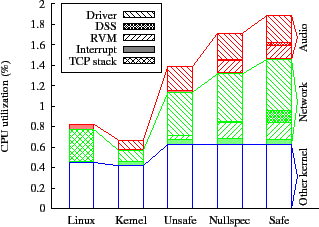
Another important driver performance metric is the CPU time spent in drivers while performing a high-level task. To quantify this, we streamed video (with audio) over HTTP and played it using mplayer. The video averaged 1071 Kbps and lasted for 30 seconds. The resulting CPU time spent in the network driver, the audio driver, and the kernel is shown in Figure 6. The CPU time spent in the Safe driver was about 2.5x the CPU time spent in the Kernel driver, which could be a limiting factor on more heavily loaded systems. A fair comparison of the CPU time of the Linux and Nexus kernel drivers was not possible, because TCP/IP time is included in the kernel in Linux and in a library in Nexus and cannot be factored out in either case. We believe that the CPU cost in Linux, ignoring the cost of TCP/IP, would be comparable to the CPU cost in the Nexus kernel.
We measured how often each driver executes basic operations and what each basic operation costs. The frequencies of memory, port I/O, MMIO, and interrupts are shown for each driver in Figure 7. All figures are the average rate per second when the driver is idle or under load, as indicated. For this test, the network load was a flood ping. Counting unmonitored memory operations (by making them monitored) makes the e1000 too slow for our tests. Hence, we estimated the rate of unmonitored memory operations for the e1000 by measuring a heavily instrumented driver under partial load, scaling its results up to what they would have been given full load.
Unmonitored memory operations are anywhere from two to 100 times more
frequent than monitored memory operations, depending on the driver. We
measured the average cost, over 100,000 tests, of an unmonitored memory
operation as ![]() ns, a monitored memory operation executed as a system
call as
ns, a monitored memory operation executed as a system
call as ![]() s, and a monitored memory operation that causes a page
fault as
s, and a monitored memory operation that causes a page
fault as ![]() s. Page faults are more expensive because they must
save more state and because the page fault handler must disassemble and
interpret the faulting instruction.
s. Page faults are more expensive because they must
save more state and because the page fault handler must disassemble and
interpret the faulting instruction.
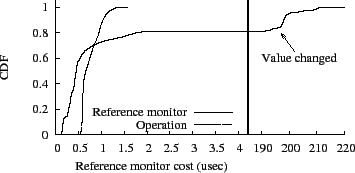
The cost of each basic I/O operation varies relatively little. However,
the cost of checking operations against the reference monitor can vary
dramatically. Figure 8 shows the cost of checking
USB port I/O operations (for disk I/O) against the reference monitor. We
found that 80% of the time, the cost is under ![]() s. The other 20% of
the time, the cost is
s. The other 20% of
the time, the cost is ![]() s or more. The expensive operation is a
safety check, required when the value read from a certain
register changes ("value changed" in
Figure 8), which happens once per millisecond.
Without significant optimization, this level of overhead is likely to be
too high for EHCI (high-speed USB 2.0) devices, which support nominal data
rates 40 times higher than UHCI.
s or more. The expensive operation is a
safety check, required when the value read from a certain
register changes ("value changed" in
Figure 8), which happens once per millisecond.
Without significant optimization, this level of overhead is likely to be
too high for EHCI (high-speed USB 2.0) devices, which support nominal data
rates 40 times higher than UHCI.
Accepted quantitative metrics for the security of a system do not exist. Nevertheless, to establish the security of our RVM and reference monitors, we used two approaches others have used. First, we simulated unanticipated malicious drivers by randomly perturbing the interactions between drivers and the RVM, resulting in potentially invalid operations being submitted to the reference monitor and possibly to the device. Second, we built specific drivers that perpetrate known attacks on the kernel using interrupt and DMA capabilities.
We simulated unanticipated malicious drivers by changing operations and operands in a layer interposed between a legal driver and the RVM. This layer modified each operation according to an independent probability of 1 in 16,384.9 Each operation was a read or a write; our modifications involved replacing either the address, the length, or the value (at random) with another value in the appropriate range. So, a write to an I/O port was replaced with a write to a port in the same range, a write of a different length, or a write of another value. Reads were perturbed similarly. Note, this approach does not produce repeatable experiments, because driver behavior depends on external factors like the OS scheduler and the arrival times of packets, which are not under our control.
This perturbation testing is similar to fuzz testing [31,26], except that our code perturbed only I/O operations--not source or machine code. Fuzz testing emphasizes isolation properties, whereas we tested only properties enforced by the RVM and the reference monitor.
We applied perturbation testing to the e1000 driver. When the modifications were benign, the driver showed no apparent failures. Sometimes, the driver itself detected an error (e.g., a status register read failed a sanity check) and exited cleanly. Often, the reference monitor detected an illegal operation, and the RVM terminated the driver. Finally, our perturbations sometimes caused the driver to get out of sync with the device, after which no further packets were sent or received. This does not compromise the integrity or availability of the kernel or the device, so the RVM has no obligation here.10 Figure 9 summarizes the different cases encountered in our experiments. The Nullspec driver completed more tests with no apparent failure than the Safe driver did, because the reference monitor used for the Safe driver blocks all unknown behavior--even if it might be benign.
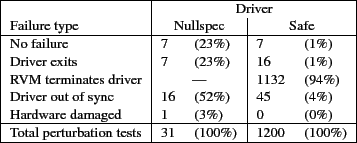 |
We hoped the perturbed Nullspec driver would cause kernel livelock, starvation, or a crash. In practice, however, the likelihood of causing driver crashes and stalls is much higher. The 31st run of the Nullspec test rendered the device unusable: neither the Linux nor the Nexus driver could thereafter initialize the card.11 We replaced the card, but we do not plan further perturbation testing.
In addition to perturbation testing, we wrote several malicious drivers to execute specific attacks on the kernel using the e1000's interrupt and DMA capabilities:
Several existing operating systems implement device drivers in user space for isolation or modularity, but without monitoring I/O and DMA operations. Hence, these systems do not defend against malicious operations by drivers. The Michigan Terminal System [9] on the IBM 360 architecture seems to be the earliest operating system to implement device drivers as user programs. Dijkstra's THE multiprogramming system [11] is organized into levels. Level 3 contains device drivers; level 0 implements a scheduler and the interrupt dispatch routine; level 2 implements semaphores, which are used to convey interrupts to device drivers. THE ran on hardware without memory protection, achieving modularity but not isolation. The SUE separation kernel [27] organizes components, including device drivers, into isolated domains akin to hosts in a distributed system. SUE uses memory protection to restrict each driver's access to I/O ports, but it provides no DMA or interrupt protection: DMA is excluded completely, and components are trusted to yield control after each interrupt or task switch.
L3 [24], MINIX 3 [19], and a modified Linux by Leslie et al. [22] all implement at least some drivers in user space, allowing each driver access to a limited set of I/O ports. This approach protects against naive attacks and at least some bugs. However, all three systems allow DMA, meaning that drivers remain trusted. Leslie includes performance results, which are comparable to the throughput and CPU overhead of our Unsafe (unmonitored) drivers.
Nooks [31] and Shadow Drivers [30] provide hardware-based isolation and fail-over operation for drivers within the Linux kernel, to prevent accidental overwriting of kernel structures. Nooks protects against common bugs, like accidental writes to memory structures belonging to another kernel component. Program rewriting techniques, such as Software-based Fault Isolation (SFI) and its successors [12,13], implement similar isolation properties in software. SafeDrive [33] uses program annotations and lightweight run-time checks to enforce type safety and bounds checking, but is explicitly not designed to handle malicious drivers. None of these techniques restricts what I/O operations are sent to devices, though SFI could; we are pursuing this approach as future work.
Microdrivers [16,17] are a hybrid implementation of Linux device drivers, with up to 65% of the driver running in user space and only the most performance-sensitive code remaining in the kernel. Microdrivers handle network interrupts in the kernel, so they are not secure. Their performance is comparable to the performance of Nexus Unsafe drivers.
Some operating systems take steps to prevent malicious drivers from misusing I/O ports or DMA transfers. Mungi [23] (on Alpha and Itanium platforms) and Scomp [14] (on custom hardware) use an IOMMU for DMA protection. Singularity [21,29] enforces type-safe interactions between drivers and devices. Originally, this type safety meant unmediated access to a restricted set of ports and memory. Singularity now relies on IOMMUs to validate DMA operations, and it does not limit interrupt rates. DROPS [18] anticipated the need for device-specific DMA monitoring prior to IOMMUs on commodity hardware.
Some safety properties can be checked statically, given rich enough rule sets or program annotations. SLAM [5] uses static rules to detect incorrect calls to the Windows driver API, but it does not enforce properties specific to any particular device. In contrast, Bierhoff and Hawblitzel extend Singularity to enforce stateful properties in SPEC# [8] much like the DMA checks in our DSSes. Static verification cannot enforce some properties a reference monitor can, especially timing properties.
Virtual machine monitors (VMMs) sometimes use drivers running in a guest operating system to control devices, instead of virtualizing all devices with drivers in the VMM. These pass-through drivers are inherently safe for some devices, such as USB peripherals, but not for other devices, such as disks or network cards. Xen [6,15] puts some device drivers in driver domains, which are protected against most crashes but not against malicious behavior; hence, driver domains are trusted.
In traditional monolithic and microkernel operating systems, every flaw in a device driver is a potential security hole given the absence of mechanisms to contain the (mis)behavior of device drivers. We have applied the principle of least privilege to Nexus device drivers by creating an infrastructure to run these drivers in user space and by filtering their I/O operations through a reference validation mechanism (RVM). The RVM is independent of drivers and devices; device-specific information is gathered into a device safety specification (DSS) that we compile into a reference monitor. The RVM consults the reference monitor before allowing each I/O operation; any disallowed operation results in the offending driver being terminated.
An obvious question is whether or not the attacks our RVM prevents are realistic. We do not know of malicious drivers "in the wild" that use a device to escalate their privileges, although we have built several of them. The reason such drivers are not yet a real threat is probably that production systems run most drivers in the kernel and in the TCB, where violating security properties can be done directly. Systems with drivers in user space are increasingly common and will inspire attacks through devices. Our RVM and DSS can prevent these attacks.
The following is an abridged version of our DSS for the Intel i810 audio device. It defines the device ID, followed by the state variables and a reset routine. A NAMES section then introduces labels for the various events associated with I/O register operations and interrupts. Finally, a TRANSITIONS section defines the allowed transitions for the state machine. By default, upon receipt of an input, all transitions are checked, and actions are applied (in unspecified order) for each satisfied predicate. Inside an ordered block, transitions are checked sequentially only until a predicate is matched; at most one action is applied inside the block. Several transitions in this DSS have empty actions--they accept an input without changing the state of the state machine.
hardware: "PCI:8086:24d5";
monitored region $RING_DMA; // Define a monitored region to contain DMA descriptors.
const $RING_LEN = 8 * 32;
var $DMA_ENABLED = 0; // Define a state variable: true when device DMA is active.
reset: C:{ // Restore device to state with no DMA or interrupts.
outb(0, $PORTIO[1].base + $CONTROL_OFFSET); // Turn off playback DMA.
while(inb($PORTIO[1].base + $CONTROL_OFFSET) != 0) ; // Wait for acknowledgment.
$DMA_ENABLED = 0;
}
//**************** NAMES *******************
// Each line maps write, read, and read_response operations on a register (address, size) to a logical name.
// Syntax: <offset, length> --> write_name, read_name, read_response_name;
names for $PORTIO[1], $MMIO[1]:
// Writes to base+0x10 with size=4 are known as write_playback_dma_base.
<0x10, 4> --> write_playback_dma_base($VAL), safe, safe;
<0x16, 1> --> write_status($VAL), safe, read_response_status($VAL);
<0x1b, 1> --> write_control($VAL), safe, safe; // Reading the control register is always allowed.
names for $RING_DMA mod 8: // Define names for writes to DMA descriptors.
<0x00, 4> --> write_descriptor_base($ADDR, $VAL), safe, safe; // offsets 0, 8, 16, ...
<0x04, 4> --> write_descriptor_len($ADDR, $VAL), safe, safe; // offsets 4, 12, 20, ...
names for $INTR[0]:
* --> i810_intr; // The only interrupt is named i810_intr.
//*************** TRANSITIONS **************
// Syntax: Pi { Ai }
// Modifying the DMA base register is only allowed if DMA is not running and the address points to monitored memory.
write_playback_dma_base(val) && $DMA_ENABLED == 0 && exists($MONITORED[i]) suchthat
range(val, $RING_LEN) in $MONITORED[i] { $RING_DMA = range(val, $RING_LEN); }
// Starting DMA is allowed only when the DMA base register points to 32 pointers to pinned, unmonitored memory.
write_control(val) && (val & 0x01) == 1 && $RING_DMA != null && (forall(k) = 0..31 (exists($UNMONITORED[j])
suchthat range(fetch($RING_DMA.base + 8*k, 4), fetch($RING_DMA.base + 8*k+4, 2)) in $UNMONITORED[j]))
{ $DMA_ENABLED = 1; }
write_control(val) && (val & 0x01) == 0 { $DMA_ENABLED = 0; }
// Changing DMA descriptors is legal if DMA is inactive, or if the modified entry points to pinned, unmonitored memory.
write_descriptor_base(addr, val) && ($DMA_ENABLED == 0) {}
write_descriptor_base(addr, val) && ($DMA_ENABLED != 0) &&
(exists($UNMONITORED[j]) suchthat range(val, fetch(addr + 4, 2)) in $UNMONITORED[j]);
write_descriptor_len(addr, val) && ($DMA_ENABLED == 0) {}
write_descriptor_len(addr, val) && ($DMA_ENABLED != 0) &&
(exists($UNMONITORED[k]) suchthat range(fetch(addr - 4, 4), bits(val, 0..15)) in $UNMONITORED[k]);
// The i810 interrupt acknowledgment protocol: first, the driver checks if the interrupt came from i810 by reading status bits 2..4;
// then, if so, acknowledges it by writing status bits 2..4.
ordered { // In an "ordered" block, transitions are checked only until the first match.
read_response_status(val) && bits(val, 2..4) == 0 { $INTR[0].status = idle; } // i810 is not asserting an interrupt.
read_response_status(val) {} // Otherwise interrupt is still pending.
}
write_status(val) && bits(val, 2..4) != 0 { $INTR[0].status = idle; } // Acknowledging interrupts is legal.
i810_intr <16, 1, 1> {} // Interrupt is rate-limited to 16 per second, no bursts.
This document was generated using the LaTeX2HTML translator Version 2002-2-1 (1.71)
Copyright © 1993, 1994, 1995, 1996,
Nikos Drakos,
Computer Based Learning Unit, University of Leeds.
Copyright © 1997, 1998, 1999,
Ross Moore,
Mathematics Department, Macquarie University, Sydney.
The command line arguments were:
latex2html -split 0 -show_section_numbers -local_icons -no_navigation ddrm-html.tex
The translation was initiated by Patrick Reynolds on 2008-10-07