
Sapan Bhatia
Princeton University
Abhishek Kumar
Google Inc.
Marc E. Fiuczynski
Princeton University
Larry Peterson
Princeton University
Troubleshooting complex software systems is notoriously difficult. Programmers employ a wide array of tools to help harden their code before it is deployed--ranging from profilers (10,12,30,1,1) to model checkers (29) to test suites (2)--but fully protecting production systems from undetected software bugs, intermittent hardware failures, configuration errors, and unanticipated workloads is problematic.
Our experience operating PlanetLab (22) convinces us that no amount of pre-production (offline) testing will uncover all the behaviors a built-from-components system will exhibit when stressed by production (online) workloads. Unfortunately, it is also our experience that existing online tools do not offer sufficient information to diagnose the root cause of such problems, and in many cases, it is difficult to even narrow in on a descriptive set of symptoms. In short, we have found production-only problems hard to reproduce and diagnose using existing tools and techniques. We attribute this situation to three unique challenges:
To address these challenges, we developed Chopstix, a tool that
continuously collects succinct summaries of the system's behavior,
spanning both the OS and applications. These summaries contain
comprehensive (with a coverage of ![]() 99.9%) logs of events that cut
across low-level OS operations (e.g., page allocation, process
scheduling, locking and block-level I/O), storing detailed contextual
information (e.g., stack traces) for each event.
99.9%) logs of events that cut
across low-level OS operations (e.g., page allocation, process
scheduling, locking and block-level I/O), storing detailed contextual
information (e.g., stack traces) for each event.
Chopstix then aggregates and visualizes this data to reconstruct complex misbehaviors. For example, unresponsive programs can be investigated quantitatively by analyzing total scheduling delays, which may be due to resource blocking or other reasons. Relevant events (i.e., delayed schedulings of the program) can then be studied qualitatively to isolate their root cause (e.g., by studying partial stack traces collected with the event).
It is our contention that Chopstix hits a sweet spot in the online diagnostic toolkit design space in that it is:
The combination of these features has made Chopstix suitable to help debug a class of problems that are difficult to diagnose by construction, problems that are intermittent and cannot be characterized. For example, it offers sufficient coverage to answer a question such as ``what was the system doing last Wednesday around 5pm when the ssh prompt latency was temporarily high, yet system load appeared to be low?'' In doing so, it is comprehensive enough to pinpoint the function calls where the system was blocked, combined with (partial) stack traces that may lead to the potential root causes of such a problem. Specifically, Chopstix's value is to help isolate the root cause of a fault or anomaly in sufficient detail to enable the responsible developer to localize and reproduce it--and hence, fully debug it using existing debugging tools.
In describing Chopstix, this paper makes contributions at two levels. At the mechanistic level, it describes how a probabilistic data structure--called sketches--enables data collection that is both detailed and lightweight. At the semantic level, it shows how system administrators can use this data to isolate problems arising from non-obvious behavior inherent in complex computer systems. On the latter point, the paper narrates our experiences diagnosing stubborn bugs encountered in PlanetLab.
This section gives a brief overview of Chopstix, providing enough context for the usage scenarios presented in the next Section. Chopstix consists of three components: a data collector, a data aggregator, and a visualizer. The collector is implemented in the kernel of each monitored node and controlled by a companion user process that periodically copies data from the kernel to the disk. A polling process regularly fetches this data from various nodes to a central location. The aggregator processes this data at multiple timescales (5 minutes, 1 hour, 1 day) and filters it with a set of user-defined aggregation functions. The output of these functions, along with overall trends in the raw data, are rendered in the visualizer and can be viewed--using a conventional web browser--for each timescale.
Although each of these components is integral to the overall workflow, the Chopstix data collector represents the key contribution--the ability to collect extensive monitoring data at low overhead. This section presents the salient features of the Chopstix collector and briefly summarizes the role of the aggregator and visualizer.
Monitoring tools for production systems must function within a limited set of resources. Chopstix addresses the tradeoff between monitoring visibility and monitoring overhead by introducing sketches (14,15) to the domain of system monitoring.
A sketch is a probabilistic data structure that allows the approximate tracking of a large number of events at the same cost as deterministically tracking significantly fewer events. Sketches are an alternative to uniform sampling, which has the disadvantage of drawing most of its samples from events with large populations.
To see the limitation of uniform sampling, imagine two processes that
are scheduled 99% of the time and 1% of the time, respectively. For
a scheduler clock rate of 1000Hz, a uniform sampling rate of 1/100
would require the latter process run for a period of ![]() 7
seconds for the probability that it be recorded to be over 50%. For
shorter periods, it is unlikely to be sampled. Sketches cope with this
situation by setting the sampling rate for a given event to be a
decreasing function of its current population in a given monitoring
interval. As a result, events with small and medium-sized populations
that would otherwise ``fly under the radar'' are more likely to be
counted.
7
seconds for the probability that it be recorded to be over 50%. For
shorter periods, it is unlikely to be sampled. Sketches cope with this
situation by setting the sampling rate for a given event to be a
decreasing function of its current population in a given monitoring
interval. As a result, events with small and medium-sized populations
that would otherwise ``fly under the radar'' are more likely to be
counted.
Specifically, a sketch treats an event in two steps. In the first step, it updates its approximation of the event's population in the current monitoring interval. In the second step, it evaluates a sampling function to determine if this event should be sampled, and if so, saves a sample of relevant information. Specific details on the choice of the data structure and sampling functions used are provided in Section 4 and their error rate is evaluated in Section 5. For now, we concentrate on the use of this data structure.
Sketches make it possible to continuously track a variety of generic system events--e.g., process scheduling, mutex locking, page allocation--whose frequency would overwhelm the resources available for monitoring if they were tracked deterministically. Accordingly, event populations corresponding to each such event type are stored in their own sketch. Section 4 describes this data structure in more detail; for now, we focus on event types, which we sometimes call the system's vital signs.1
An event is given by a tuple that includes its type (i.e., the vital sign to which it belongs), a virtual address (e.g., the value of the program counter at the time the event occurs), an executable-file identifier, a user identifier, and a weight (this field is used by the sketch data structure). The tuple also includes a stack trace and other event-specific variables that depict the circumstances of the event. For example, a scheduling-delay event specifies that a process--identified as a username/program pair--was not scheduled in spite of being runnable for a period corresponding to the event's magnitude; the event includes a stack trace taken as the process waited.
Using Chopstix to monitor nodes in PlanetLab as well as other systems running open-source software has helped refine our notions of what vital signs should be chosen as part of the monitoring set. The kinds of bugs we see typically have temporal and spatial ambiguities. These bugs typically cannot be reproduced, and when they happen, they do not leave behind a trail of evidence. Since we begin without a priori knowledge about the problem, or even a complete characterization of the problem, we devise a strategy to study deviations in the health of the system. Thus, a good vital sign for monitoring is a property that serves as a useful witness--has a strong temporal and spacial presence--so that when incidents do occur, it captures enough information to reconstruct the system's behavior.
To this end, Chopstix monitors 11 vital signs, chosen to cut across OS operations at the lowest level. The current set includes: CPU utilization, scheduling delay, resource blocking, disk I/O activity, user page allocation, kernel page allocation, L2-cache utilization, system call invocation, signal delivery, socket transmission, and mutex/semaphore locking. Note that we do not claim this set is complete, but the set is easily extended by adding new collectors statically (through code patches for the kernel), or dynamically (through loadable modules or an instrumentation toolkit (3,20)). Capturing a new vital sign can be accomplished by deploying as little as six lines of code.
Continuing the metaphor of computer system as medical patient, we treat unusual behavior in one or more vital signs as a symptom of the problem we are diagnosing. This definition is admittedly vague, where identifying and interpreting symptoms corresponds to the art of diagnosing a problem. We return to this process in Section 3.
For now, we give a simple example. A steady overall rate of disk I/O might indicate good health of the I/O subsystem. However, observing breakdowns of this rate--e.g., specific I/O requests and responses--may reveal requests that are not satisfied (i.e., the request size was greater than the response size). Such behavior would contradict the assumption that all requests are satisfied, indicating a disk problem is possible.
The data collected by Chopstix on a node is periodically transferred to a central location where it is processed and rendered. Data from one or more nodes is aggregated by an engine tailored to time-series multi-sets. Specifically, the raw data is aggregated at fixed-sized timescales of 5 minutes, 1 hour and 1 day and passed to a set of multi-set aggregation operators (called filters) via a well-defined API that can be used to deploy new operators. For example, an experimental Exponentially-Weighted-Moving-Average (EWMA) anomaly detector has been implemented as such an operator in about 80 lines of code. Other similar functions sort the sets, measure affinities between items across epochs, and so on. The aggregator also reconstructs the sketching data structures to compute the values of the vital signs.
The visualizer accepts user requests for specific time ranges and passes them on to the aggregator, which returns the vital signs corresponding to each epoch in the range. These statistics are plotted as a line graph. A user can compare vitals and look for symptoms by overlapping graphs and zooming into specific epochs of interest to retrieve detailed samples, including breakdowns of the vital signs. Clicking on a sample brings up further event-specific information such as a stack trace.
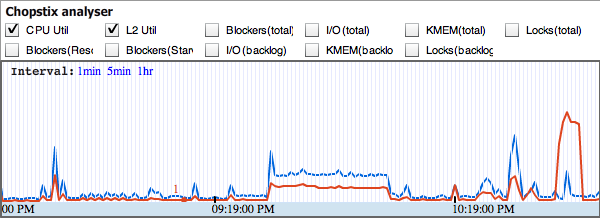 |
Figure 1 presents a screenshot of the visualizer, showing the main navigator window in which the vital signs of interest can be selected and overlapped. The X-axis corresponds to time, with a least count of 1 minute, and the Y-axis is normalized. Specific epochs can be clicked on at a given timescale to view filtered samples for any vital sign. In this example, the spike at the far right was detected to be a busy loop in the web browser Opera. The correlation that led to this conjecture is a high CPU-utilization rate at a comparatively low L2-cache utilization rate, which we have observed to be a feature of busy loops.
This section traces the Chopstix workflow, using examples drawn from our experiences diagnosing problems on PlanetLab to illustrate the insights into system behavior revealed by Chopstix.
One obvious takeaway from this section is that diagnosing system failures is a difficult and inherently human-intensive activity. Re-enforcing that conclusion is not the point of this section. The main contribution is to demonstrate how detailed information collected on a production system can effectively be used to isolate the most stubborn bugs. A secondary contribution is to summarize several ``system diagnosing rules'' that we believe have general applicability.
The basic workflow is as follows. A user decides to use Chopstix to diagnose a misbehavior that either has temporal ambiguity (a bug that is not punctual and seemingly cannot be reproduced), or spatial ambiguity (a bug that cannot be localized to a component). We assume that Chopstix has been collecting data on one or more systems for which the problem is observed.
Chopstix data is searched to identify possible symptoms (unusual vital sign behavior). If the misbehavior has been reported to have occurred at specific times, then the visualizer can be used to zoom into the corresponding epochs at various time granularities. If the epoch of misbehavior does not yield an interesting symptom, then the information prior to these epochs is searched to find outliers in the vital signs. This is a fairly mechanical process and can be performed by setting threshold filters. Candidate symptoms are then correlated in the light of the observed misbehavior. If no diagnosis can be formulated as the symptoms do not bear any relationships, then the current set of symptoms is discarded and this step is repeated.
Once the problem has been diagnosed to a given set of symptoms, then it may either be reproduced by artificially triggering the symptoms, or alternatively avoided by working around the circumstances that led to the symptoms. The information available at this point should usually suffice to employ standard debugging tools.
Interpreting symptoms is the ``art'' of diagnosing system faults. Chopstix's value is in recording the vital signs, and visualizing those vitals to expose unusual behavior--i.e., symptoms. It is often through finding correlations across multiple symptoms that the root cause of the problem is understood.
While we cannot claim an automated ``symptom correlator,'' we can formulate a set of rules to guide the diagnosis process. These rules typically depend on the components to which the symptoms in question apply, and thus require an understanding of the semantics of these components. Nevertheless, some rules are universal because they are inherent to the underlying OS. This section presents a collection of such rules, some of which have been implemented as filters and can be made to report these relationships in the visualizer.
Each rule maps one or more symptoms into the high-level behaviors that typically lead to such symptoms. Some rules are intuitive (e.g., a continuous increase in net memory allocated is a sign of a memory leak), while others are based on the repeated observation of a given cause and effect (e.g., a near-zero L2-cache-miss rate and heavy CPU utilization indicates a busy loop). The following classification of values as low and high is vital-sign-specific, and can be flagged by the visualization sub-system using appropriately set thresholds.
Rule #1: High CPU utilization (![]() ) with a low (nearly-zero)
L2-cache-miss rate (
) with a low (nearly-zero)
L2-cache-miss rate (![]() ) is a symptom of a busy loop; i.e., a loop
that is unproductive but that does not yield the CPU to the scheduler.
This is because processes in busy loops consume CPU resources but do
not generate much memory traffic. The value of
) is a symptom of a busy loop; i.e., a loop
that is unproductive but that does not yield the CPU to the scheduler.
This is because processes in busy loops consume CPU resources but do
not generate much memory traffic. The value of ![]() gives a rough
approximation of memory traffic, and when it is seen to be low with
a high
gives a rough
approximation of memory traffic, and when it is seen to be low with
a high ![]() , it usually amounts to a busy loop.
, it usually amounts to a busy loop.
Rule #2: An increase in the net (user or kernel) memory allocated is an indicator of a memory leak.
Rule #3: Unsatisfied I/O requests indicate bad blocks on the disk. An unsatisfied I/O request is defined as one for which the size of the data requested is greater than the size of the data returned in the corresponding response.
Rule #4: When the combined value of ![]() for processes is
low, scheduling delay (
for processes is
low, scheduling delay (![]() ) is high, and the total
) is high, and the total ![]() is high
for the system, it is often a sign of a kernel bottleneck (e.g., a
high-priority kernel thread). In this case, processes are not
scheduled because the scheduler is not given a chance to run. This
rule also applies to preemptable kernels, with the caveat that the
symptoms are less conspicuous.
is high
for the system, it is often a sign of a kernel bottleneck (e.g., a
high-priority kernel thread). In this case, processes are not
scheduled because the scheduler is not given a chance to run. This
rule also applies to preemptable kernels, with the caveat that the
symptoms are less conspicuous.
Rule #5: When the resource blocking vital (![]() ) for a
process is high, then it is typically mirrored by one or more of the
following vitals: disk I/O (
) for a
process is high, then it is typically mirrored by one or more of the
following vitals: disk I/O (![]() ), locking (
), locking (![]() ) or socket
traffic (
) or socket
traffic (![]() ), thereby isolating the source of the blockage.
), thereby isolating the source of the blockage.
Rule #6: When the amount of user-memory allocated (![]() ) is
high for a process, where
) is
high for a process, where ![]() and
and ![]() are also high for the same
process, then it is a sign of low main memory and swap activity. When
the latter two are low, it means that abundant main memory was
available on the system at the time.
are also high for the same
process, then it is a sign of low main memory and swap activity. When
the latter two are low, it means that abundant main memory was
available on the system at the time.
Rule #7: When ![]() is low for a process and low for the
kernel, and if
is low for a process and low for the
kernel, and if ![]() is high for the same process, then the process
is being held from scheduling. If
is high for the same process, then the process
is being held from scheduling. If ![]() is high for the system, then
it is being held normally, in line with fair sharing of the
CPU. If it is low, then it is being held abnormally.
is high for the system, then
it is being held normally, in line with fair sharing of the
CPU. If it is low, then it is being held abnormally.
Rule #8: When ![]() for a process is low compared to the rate
of system calls (
for a process is low compared to the rate
of system calls (![]() ), then it often indicates a busy loop with
a system call; e.g., a send call that fails. The intuition is
similar to that of Rule #1: A high value of
), then it often indicates a busy loop with
a system call; e.g., a send call that fails. The intuition is
similar to that of Rule #1: A high value of ![]() is indicative of a
process that causes heavy system activity. Accordingly, a high
syscall rate should be mirrored by a high value of
is indicative of a
process that causes heavy system activity. Accordingly, a high
syscall rate should be mirrored by a high value of ![]() .
.
Rule #9: Low ![]() and high user-memory allocation (
and high user-memory allocation (![]() ) in
an application is a sign of application initialization. If
) in
an application is a sign of application initialization. If ![]() is
high with a high
is
high with a high ![]() then it is a sign of increasing load. User
memory is made available to processes on demand, when they access
virtual-memory pages that have not yet been mapped to physical ones.
At initialization time, processes ``touch'' several such pages while
initializing data structures, but generate comparatively low memory
traffic, leading to a low value of
then it is a sign of increasing load. User
memory is made available to processes on demand, when they access
virtual-memory pages that have not yet been mapped to physical ones.
At initialization time, processes ``touch'' several such pages while
initializing data structures, but generate comparatively low memory
traffic, leading to a low value of ![]() . Similarly, when memory is
paged in and is accompanied by high memory traffic, then it is a sign
of increasing load.
. Similarly, when memory is
paged in and is accompanied by high memory traffic, then it is a sign
of increasing load.
Rule #10: An abrupt disappearance of the vital signs of a process can indicate that it has died, or that it stopped functioning. The cause of death can be investigated by looking at the signals that it received and the syscalls it executed (e.g., in Linux, the sys_exit system call would indicate voluntary death, a SIGSEGV signal or a segmentation fault would indicate accidental death, and a SIGKILL signal would mean that the process was killed. In the case of a bug, the program counter associated with the stack trace can be used to trace the problem to the exact code site at which the problem was caused.
The remainder of this section uses these rules, along with other intuitions, to describe our experiences in debugging real problems on PlanetLab.
This section presents a case study of an especially complex and troubling bug that we found using Chopstix. The PlanetLab team had been investigating it for over 6 months (Chopstix was not stable and had not been deployed up to this point) but was unable to pinpoint or reproduce the problem.
The example illustrates how the key features of Chopstix are leveraged: (1) multiple vital signs are correlated to understand the problem, (2) a long history saved through continuous data collection is mined for information, and (3) contextual information is used to rule out misdiagnoses and isolate anomalies to specific code sites.
Observed Behavior. Nodes were observed to crash every 1-7 days without leaving any information on the console or in the system logs. Shortly before such crashes it was observed that ssh sessions to nodes would stall for tens of seconds. Some nodes that were running an identical software stack did not suffer these crashes, indicating that the problem was load-dependent. KDB (24), a kernel debugger, was activated on one node in the hope that it would take over at the time of the lockup, but it did not survive the crash. The NMI watchdog was programmed to print a stack trace, but it printed program counters on the stack and often random false information.
Symptoms and Correlations (First Attempt). Visual inspection of the vital signs on nodes that had crashed showed spikes in the resource-blocking vital. Processes of the ssh daemon could be seen here, confirming that this accounted for the stalls on the ssh prompt. Rule #5 was applied and attributed the blocking to locking as well as I/O. To investigate the problem further, the stack traces for blocked processes on the I/O and lock signs were pulled out. The stack traces for locks resembled the following:
classoffset=3,language=C,basicstyle=,classoffset=2,stepnumber=1,xleftmargin=20pt
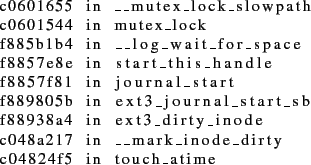
Apparently, a process attempted to update the access time of a file, which led to an update of a journal transaction in the underlying file system. This code path can be deciphered to reveal that the journal transaction was protected by a locked mutex and was in the process of being committed to disk.
For I/O, the stack traces were similar to the one below:
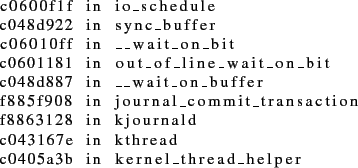
This particular stack trace reveals the reason that the aforementioned batch of processes was blocked. The journal is trying to commit the current transaction to disk.
Many other processes were similarly blocked. It was speculated that the source of these blockages would also block all subsequent activities on the system and result in the crash. However, contrary to our expectations, it was found that in the epochs corresponding to this blockage, I/O throughput degraded negligibly and request-response latencies stayed low. Also, using a filter implementing Rule #3 to search this data for unsatisfied requests did not return any results adding to the evidence that the I/O subsystem was functioning normally. The clinching proof came with the observation that the activity was interrupted from time to time over many epochs during which there was little or no I/O, wherein many of the previously blocked processes would get unblocked and the blocking vital drop to a normal, low value.
Thus, the I/O ``problems'' were telltale and only a reflection of a legitimately heavy I/O workload. Chopstix was able to rule out the misdiagnosis through the correlation of multiple symptoms (I/O, blocking and locking) and through detailed hindsight that allowed the disk subsystem to be diagnosed postmortem.
Symptoms and Correlations (Second Attempt). Since the above symptoms did not yield a diagnosis, they were discarded. A new outlier was then discovered on the resource-blocking vital in the time shortly before the crashes. Some processes had been blocked for seconds, but this time Rule #5 did not apply. Furthermore, investigating stack traces showed that the blocking sites were not invocations of blocking operations. We wrote a filter to locate this effect throughout the available data set and found it interspersed throughout the history of the system. Closely coupled with these in the same epochs, were symptoms that matched Rule #4, that is, high scheduling delays with heavy CPU utilization in the kernel. On examining these spikes (the lead was now hinting at a bug in the scheduler) we found the corresponding bottleneck to be at line 6 of the following block of code.
classoffset=3,language=C,basicstyle=,classoffset=2,numbers=left,stepnumber=1,xleftmargin=20pt
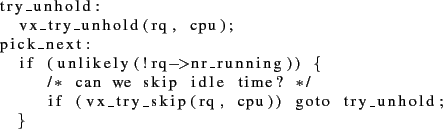
A casual examination revealed this code to contain a tight loop. We then confirmed this problem by using kprobes to inject code at this site. This information was reported to the developers who wrote this code, which lies in the scheduler. Additional contextual information (e.g., the stack trace at this point) was also provided to them. They confirmed it to be a fault and went on to fix the bug.
In summary, the availability of a long history of multiple vital signs allows anomalies across them to be correlated, and access to contextual detail allows these anomalies to be traced to a specific code site. The application of these features to a problem that conventional approaches could not resolve is a validation of the diagnostic abilities of Chopstix.
We now briefly list other examples of diagnosis using Chopstix. Unlike the bug described in the case study, these problems were resolved relatively swiftly--usually within a day--as the relationships between the observed symptoms were more straightforward. To save space, we omit specific details and restrict ourselves to outlining the problem and the symptoms that led to the diagnosis.
SMP-dependent memory corruption in the kernel. By using a filter to find memory leaks, we were able to identify double deallocations of a socket structure provoked by an SMP race. This bug had prevented PlanetLab from using SMP hardware for over a year.
Hung file-system transactions. By correlating disk I/O, mutex locking and resource blocking, we were able to determine that a locking bug was poisoning the inode cache with uninitialized (locked) mutexes, causing filesystem misbehavior.
Out of low-memory crashes. Correlating spurts of I/O, kernel memory and blocking shortly before such crashes revealed that certain processes were unable to deallocate memory as they were blocked on I/O, causing memory to run out. The swap daemon was seen to be blocked as well, explaining why memory could not be reclaimed.
Watchdog restarts a failed program. By correlating disk I/O, syscalls, Socket activity and User-page allocation, we found that an application would fail to read its configuration file and crash, but that it would then be restarted immediately by a watchdog process implemented as part of the application. On each crash it would write out a log to disk, eventually filling the disk. Other methods (e.g., searching for large files on the disk) may have been used to identify this problem, but would have entailed a more rigorous examination of how the file, the config file and the watchdog interacted with one another than it was necessary with the global view provided by Chopstix.
ps gets blocked accessing the kernel. The blocking and I/O vital isolated unexplained blocking to a line in the kernel that was accessing the process command line. The explanation for the blocking was that the commandline is stored in the stack area of a process, which in this case was being swapped out for dormant processes.
This section describes Chopstix's implementation. It first outlines the data structures, algorithms and design decisions involved in implementing the data collector. It then describes specific vital signs we have implemented using this data collector mechanism, and concludes with a brief overview of the aggregator and visualizer.
Sketch-based data collection involves five steps, the first four of which happen in the kernel: (1) a trigger fires for a potentially interesting event; (2) the relevant event data structure is retrieved and a sketch is updated; (3) a sampling function is evaluated to determine if this event should be recorded; (4) if so, a sample of relevant information is saved; and (5) a user-level process periodically polls the kernel for this data and resets the data structure, thereby defining a data collection epoch.
The sampling process is designed to balance two objectives. First, it should capture enough detail to identify interesting events. This is achieved by incorporating the notion of event-weights in the data structure that tracks per-event frequencies. A competing objective is to limit resource use to keep the overhead within predefined bounds. This is achieved through the use of an adaptive tuning mechanism that changes the effective sampling rate depending on the recent history of resource usage. The use of a logarithmic sampling function contributes to both objectives, minimizing the false negative rate to ensure accurate identification of important events, while reducing the resource consumption by aggressively reducing the sampling rate for events with large counts. We describe these features in detail below.
The entry point into Chopstix is an event trigger, which invokes Chopstix in response to a change in a vital sign. One strategy to implement triggers is to poll various vital signs at set intervals and invoke Chopstix if they are seen to change significantly. In practice, however, it is always more efficient to instrument the OS interfaces that cause the relevant vital sign to change and invoke Chopstix on every invocation of such interfaces.
We illustrate this idea with an example. Kernel-page allocation may be monitored by polling the total number of free pages on the system. However, there may be periods during which there is no page allocation, making the polling process a waste of system resources. At other times, the page-allocation frequency may be higher than the corresponding polling rate, making the latter insufficient to account for each such event and leading to the limitations of uniform sampling. Thus, we instrument the interface to the page allocator to convey every page allocation to Chopstix as an event, which in turn accounts for each event in a sketch data structure and samples the events with better coverage than would be the case with the polling strategy. For monitoring hardware-related vital signs such as CPU utilization and L2-cache misses, the underlying processor can be made to generate interrupts to convey their values. The handlers for these interrupts are then used as placeholders for the event triggers corresponding to these vital signs.
The sketch data structure employs a sampling function where the probability with which an event is sampled depends on its frequency. The frequency of events is approximated by counting the number of times the event occurs in a given data-collection epoch. Since maintaining exact per-event counts at the high frequency of vital signs is prohibitively expensive, we relax the requirement of exactitude in exchange for an approximate estimate that is relatively easy to obtain.
Chopstix uses a simple data structure--an array of counters indexed by a hash function (HCA)--to maintain these estimates, as well as to record samples collected for each vital sign. Updating an HCA is simple. Upon the reception of an event, the event label is extracted and hashed to generate an index for the HCA for the event type (vital sign). The label is specific to each vital sign, but typically consists of a virtual memory address, an executable identifier, and a user identifier. The counter at this index is incremented by the weight of the event (next paragraph). This counter is later used by the selection process to decide if a sample should be collected (next subsection).
An important observation about the events is that they are not all created equal. For example, iowait events can last from a few microseconds to several seconds. Clearly iowaits that run into seconds need to be assigned more ``weight'' in any performance analysis. Fortunately, the model of per-event counters can be extended easily to accommodate this requirement--while updating the HCA, the counters are incremented by a value that reflects the weight of the event being tracked. Returning to our I/O example, the length of the iowait period can be counted in jiffies (one jiffy is equal to the time period of the scheduler) and used as the weight associated with an iowait event. In this manner, call sites that are reached only a small number of times but account for a large amount of total time spent in iowait will get the same ``count'' as call sites that are reached more frequently but result in smaller aggregate iowait time.
Collisions in the hash function may cause two or more events to be hashed into the same location in the HCA. We do not have any explicit mechanisms to handle collision as such a mechanism would impose an overhead that would be unsustainable at the targeted event frequencies. This decision makes the selection processes very fast and allows us to monitor a large number of high-frequency event-types with nearly zero overhead. It results in false negatives, but their probability is negligible, as documented in Section 5.
We considered other more precise data structures than HCAs, but were satisfied by the ensuing low probability of false negatives (i.e., important events that go un-sampled) of HCAs and found their computational simplicity to be a good trade-off for the tighter bounds that come with more precise accounting data structures such as a Space-code Bloom Filters (16) and Counting Bloom Filters (7).
Our objective in the selection process is to collect event samples for
as many events as possible, without wasting resources on repetitive
collection of the same (high-frequency) event. To achieve this, we use
dynamic sampling probabilities computed as a function of the
event-count in a given epoch. The function is chosen in such a way
that the expected number of samples collected for any one event grows
as ![]() of the count of that event.
of the count of that event.
In practice, a simple threshold-based algorithm can achieve this
effect. Using an integer sampling threshold ![]() , the selection process
selects an event if its estimated count is an integral power of
, the selection process
selects an event if its estimated count is an integral power of
![]() . The integer arithmetic can be simplified by picking a
. The integer arithmetic can be simplified by picking a ![]() that is
a power of 2. The accuracy of the logarithmic sampling function is
evaluated in Section 5.
that is
a power of 2. The accuracy of the logarithmic sampling function is
evaluated in Section 5.
To ensure bounded resource usage, Chopstix implements an adaptive
scheme that tunes the threshold ![]() . Chopstix uses a high watermark
for the total resource consumption within an epoch, and doubles the
value of
. Chopstix uses a high watermark
for the total resource consumption within an epoch, and doubles the
value of ![]() whenever the actual resource usage reaches this
watermark. A low watermark is also used, with the value of
whenever the actual resource usage reaches this
watermark. A low watermark is also used, with the value of ![]() halved
if resource usage at epoch boundaries is below this low watermark. The
watermarks are defined in terms of the number of CPU cycles consumed
by Chopstix, which are updated at the end of every epoch. These
watermarks are configured by the administrator and can be used to set
aside a fixed amount of CPU for monitoring.
halved
if resource usage at epoch boundaries is below this low watermark. The
watermarks are defined in terms of the number of CPU cycles consumed
by Chopstix, which are updated at the end of every epoch. These
watermarks are configured by the administrator and can be used to set
aside a fixed amount of CPU for monitoring.
When an event is selected for sampling, a variety of contextual information is collected and appended to a list of samples for the corresponding vital sign. The information includes a stack trace, the user identifier, a program identifier and other event-specific details that are descriptive of the circumstances at that point. The event-specific details usually include an operation field (e.g., allocation or deallocation for memory events, locking or unlocking for locks, read or write for I/O). Kernel stack traces are collected by following the current frame pointer.
User-level stack traces are collected similarly. However, since user memory may be paged out, and Chopstix being interrupt-safe is not allowed to block, it is first checked if the desired pages on the user stack are available in memory; if not, the trace is abandoned. In Linux, the executable file associated with a process is the first executable memory mapping in its address space and can be looked up quickly, but its path cannot be included in the sample as it can be arbitrarily long. To overcome this problem, we use a facility in Linux called dcookie, which stores the address of the data structure representing the file on disk (a dentry structure in Linux) in a hash table. We store the hash index in the sample and retrieve information about the data structure from user space at synchronization time at the end of every epoch.
Data collection is carried out in fixed-sized epochs, under the control of a user-level process. The process invokes event-specific serialization functions on the sample list for each vital sign, and their output is saved, along with the HCAs from the previous epoch. The HCAs and all other data structures are then reinitialized. To avoid interruptions in monitoring at synchronization time, two copies of the HCA and sample arrays are maintained for each vital sign. At the end of each epoch, pointers are swapped and the unused HCAs are activated.
Having fixed epoch sizes allows us to circumvent an issue that arises with continuous monitoring. As data is accumulated while monitoring a running system, it also needs to be passed on for further processing. One approach is to identify certain entities, such as a process id, and export all data corresponding to an entity when the entity is no longer present in the system (i.e., export all events associated with a process when the process is terminated.). However, there are a few problems with this approach. First, data associated with entities is not available for analysis until the entity has expired. This may be acceptable during development but is a handicap when monitoring a production system. Second, the lifetime of entities is almost always some complex distribution that brings an additional layer of complexity if statistical analysis of the aggregate data is desired (6).
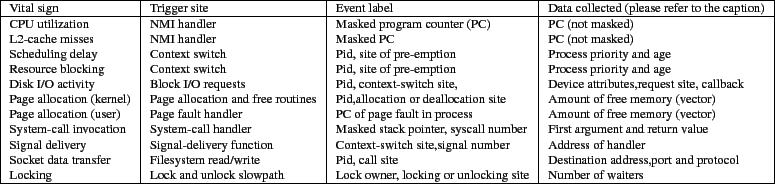
The mechanisms just defined enable the efficient tracking of high-frequency system events. A set of vital signs have been defined to use these mechanisms as a way to diagnose common problems on systems. An interface has been defined in the C language for allowing the extension of this set to define new event types. Since the processes downstream of event sampling do not depend on the number of event types monitored in the system, the extensions can be plugged in dynamically using instrumentation toolkits such as Dtrace (3) and Kprobes (20). We now describe the implementation of the vital signs and the process of deploying new ones. Figure 2 tabulates the main characteristics of each vital sign, namely, where in the kernel it is implemented, the label used for hashing and the data collected when an event of this type is sampled.
CPU and L2-cache Utilization. CPU and L2-cache utilization are collected through hardware performance counter interrupts (25). These counters are typically controlled through a set of model-specific registers (MSRs) which are used to select the type of event monitored and a counting threshold. When the number of processor events of a certain type exceeds this threshold value, a non-maskable interrupt (NMI) is generated and the value of the corresponding counter is conveyed to the OS. The Chopstix L2-cache and CPU triggers are located in the handler of this interrupt and trigger when an interrupt is delivered for the CPU-utilization and L2-cache-miss counters.
The event label used for the purpose of hashing consists of a PC, which is masked to drop the low 8 bits and an event subtype. The value of the PC can be obtained using MSRs and corresponds to the site whose CPU utilization or L2-cache misses is being measured. The PC is masked based on the observation that these events often register samples containing sites in close neighborhoods of each other and that are semantically dependent. Sketching on the other hand assumes tracked events to be independent, failing which it suffers from the weaknesses of uniform sampling (14). By dropping the low bits of the PC, we reduce this dependency and make the collection of these events more robust. Note that the data collected when these events are sampled does not contain such an adjustment and instead uses the real value of the PC.
 |
Scheduling Delay and Resource Blocking. Processes commonly get delayed in their normal course of execution by virtue of accessing resources that are not immediately available or as a result of scheduling policy. Rarely, as discussed in Section 3, processes may also get delayed due to system bugs. The scheduling delay and resource blocking vital signs correspond to the amount that various processes are delayed or blocked. The determination of whether a process is delayed or blocked is made based on the state of the process, which is changed by the kernel when a process accesses a resource that is unavailable. The trigger for these events lies in the routine that performs context switches between processes. On each context switch, the time since the last run of the process to be scheduled next is calculated. When this value exceeds a delay-qualifying threshold, a Chopstix event is generated. The time since the last run is calculated based on a timestamp, which is recorded by Chopstix in the context-switch routine at the time the process is scheduled, or when it undergoes a state transition.
The event label includes the site at which the process was preempted, which may be in the kernel. If in the kernel, computing this address entails tracing the stack and has an unacceptably high overhead for each context switch. Therefore, we use two-stage sampling, using only the pid in the first stage and tracing the stack to determine the value of the preemption site in the second stage.
Disk I/O and Page Allocation (Kernel and User). The Disk I/O trigger is located in the block I/O layer. On each such request, Chopstix determines the site of preemption and uses it as part of the event label. The data collected includes the site from which the I/O request was invoked. This site is not used in the event label as the number of such sites is small (10s to 100s) and the number that is actually used at a time is even smaller (5-10). The number of sites in the process at which disk I/O can be invoked is unlimited as a program and its data can be swapped out to disk and all system calls can lead to journal commits, which lead to disk activity. Therefore, using the latter in the event label yields a more uniform hash function.
Kernel page allocation uses the allocation site in the event label. The Chopstix trigger for this event is located in the lowest-level page-allocation interface so as to capture this event as exhaustively as possible. However, allocation sites in the kernel invoke these functions indirectly through higher-level interfaces which would normally make it necessary to trace the stack to determine the value of the call site. We cope with this situation by modifying the interface to these low-level page-allocation functions so that the calling site is passed to them as a parameter. The value of this parameter is used to construct a Chopstix event. The scope of these modifications was minor and involved less than 10 lines of changes to the relevant file.
User page allocation (or user memory allocation) is triggered in response to certain page faults. Such page faults are generated when a process touches memory that has been allocated to it, but that has not been mapped in. The context-switch site (i.e., the PC of the process at the time it accessed the unavailable memory) is used in the event label here. Usually, such sites have been observed to lie in the neighborhood of calls to allocate memory in user-space (e.g., malloc). However, this may not necessarily be the case as there may be a significant lag between a process allocating memory and its actual use of it.
The data collected for both user and kernel allocations consists of the state of free memory for various regions, such as low memory, high memory and swap. This information can be used to study out-of-memory scenarios and at the same time reason about memory and disk traffic.
Syscalls, Signals and Socket Operations. Triggers to system calls and signals are implemented in the respective dispatchers. For system calls, the virtual memory address in the event label cannot correspond to the site from which the system call was invoked (i.e., the site of context switch) for the following reason. System calls are invoked via library functions that are typically implemented in a shared library. Thus, the calling site always has the same value, which corresponds to the syscall function defined in libc in Linux. We overcome this problem as follows. We would like to differentiate between system calls from different locations in the program. Since we cannot obtain this address, we will try to approximate it using a value that typically remains constant at a given code site. We have found the value of the stack pointer to work extremely well for this purpose. The reasoning behind this behavior is that the stack pointer reflects the execution path taken up to the execution of a system call, and that the number of unique paths that lead to system calls is relatively small for programs in general. Non-tail-recursive functions that execute system calls are rare but can unfortunately subvert this vital sign by flooding the sketch data structure, since each level of recursion is seen by Chopstix as a separate site. This case however, is easy to identify, even without inspecting the source code of the program in question, since the virtual memory addresses seen in the samples appear at constant offsets of each other.
The trigger for sockets sends and receives is a ``catch-all'' point for all types of sockets and lies in the filesystem layer. It is triggered when a file descriptor is read or written to, and when its file is of type socket. The type of data collected is the destination address, destination port and protocol number.
Locking. The locking vital involves mutexes and semaphores, which cause processes to sleep when they are accessed in locked state. Such processes are pushed into a queue and woken up sequentially when the owner of the lock unlocks the lock. Linux implements a fastpath for locks, which checks if the lock is available and acquires it by atomically testing its reference count and incrementing it. We do not modify this fastpath in the interest of its original design. Furthermore, the locking vital is interesting only when there is contention in the system, which is not the case when the fastpath succeeds. Accordingly, we modify the slow path of the locking and unlocking operations, which are invoked when an attempt is made to access a lock that is held by another process. We have modified the relevant lock data structures to contain a field identifying the owner of the lock, which is used in the event label as well as the data collected. When contention is noticed in the system, the owner can be referenced to determine the reason for the contention.
The goal of the aggregator is twofold. First, it organizes the information collected at multiple timescales, to filter them with a set of user-defined transformation functions and to pass the resulting information to the visualizer. Second, it reconstructs the sketch data structure for each epoch to compute the weighted sum of the vital signs for the epoch, and the total number of unique events seen (e.g., for memory allocation, these numbers correspond to the total memory allocated and the total number of memory-allocation sites). These actions happens in two stages: a processing phase in which the data is aggregated and transformed once and for all and cached, and a retrieval phase in which contents of the cache are returned to the requesting user. Queries for arbitrary intervals are supported but not cached. Cached retrievals are faster than un-cached ones by about a factor of 10.
The aggregator is invoked by the visualizer when a user requests the visualization of a given time range of activity. The main data structure used by the aggregator is a list of queues. The number of entries in the list corresponds to the number of timescales (currently three). As mentioned previously, the data collected by Chopstix is organized as a set of timestamped directories. The data aggregator reads data from these directories in chronological order. As data is read in, it is also aggregated and transformed. Transformation functions are implemented as queue operators, are compiled into shared libraries and are scanned in when the aggregator is called into operation by the visualizer. When a transformation function is added, changed or removed, all caches are invalidated.
The visualizer is web-based and is implemented in Macromedia Flash. The aggregator returns the information requested by the visualizer in two parts. The magnitudes of vital signs for each epoch are URL-encoded and the output of the transformation functions consisting of samples including program counters, stack traces and other contextual information are returned in XML format. The magnitudes of the vital signs are plotted in line graphs in separate panes that can be overlapped. When a given epoch is clicked on, the corresponding samples for the active timescale are displayed.
The effectiveness of Chopstix relies on its low overhead, which enables it to run continuously; and its extensive coverage of the events monitored, which prevents potentially interesting behaviors from flying under the radar. This section evaluates these two key properties, along with the responsiveness of the Aggregator and the Visualizer. We measure the data collection overhead through micro- and macro-benchmarks, comparing the macro-benchmarking results to those obtained for a comparatively information-poor system profiler. We quantify coverage in terms of the probability of false negatives for which we derive a formula. We verify empirically that this probability is low in practice.
For our experiments, we use a system with a Core2Duo processor and 4GB
of RAM running Linux version 2.6.20.1. The performance counter
hardware was configured to generate NMI interrupts for every ![]() CPU cycles and for every
CPU cycles and for every ![]() L2-cache misses. The configuration
of Chopstix was set to disable all limits on the CPU utilization that
are otherwise used in adaptive sampling.
L2-cache misses. The configuration
of Chopstix was set to disable all limits on the CPU utilization that
are otherwise used in adaptive sampling.
Table 1 reports the results of running the lmbench (18) micro-benchmark with and without Chopstix. The main takeaway is that the overhead is negligible. It exceeds 1% only for simple operations for which the sketch update is not amortized, but these operations are being executed in a busy-loop that is uncommon and usually considered to be an anomaly in a production environment.
Table 2 displays the results of two macro-benchmarks: a kernel compile and an HTTP server. These tests compare the performance of a Chopstix-monitored system with that of a vanilla system, as well as with the performance of a system running OProfile (12). Oprofile was configured to track only two events--CPU utilization and L2-cache utilization--both at the same rate as Chopstix. It was configured to collect stack traces in its profiles. Chopstix was configured to collect all the vitals and auxiliary information described throughout this paper.
The kernel compile was carried out using the following steps: clean the kernel tree (make mrproper), configure the kernel (make oldconfig), reboot the system, and compile it. For the web-server benchmark, we used a tool named apachebench, which sends requests to the benchmarked system over a fixed number of connections specified at the command line. The number of connections was set to 512, and a single HTML file of about 1400 bytes was used as a target. We ran both the client and the server on the same machine to eliminate the dependence of the experiment on the network. Both tests were conducted 10 times for each configuration.
As shown in Table 2, Chopstix has a near-zero overhead. Moreover, when compared to Oprofile, it is effectively an order of magnitude more efficient on the kernel-compile benchmark and significantly more efficient on the HTTP benchmark. This, in spite of the fact that Chopstix collects significantly more information. Some of the microbenchmark results give an edge to the performance of the system with Chopstix enabled. We verified that this difference was the result of two different kernels being used, and that disabling Chopstix did not influence it.
The responsiveness of the combined aggregator and visualizer was measured by requesting a data set spanning three days via the visualizer, first in uncached mode and then in cached mode. This process was repeated 10 times. The aggregator was configured to use six filters to post-process the data.
The initialization of the session to the aggregator, during which the requested data is read and post-processed, took about 80 seconds when it was not cached and about 3 seconds when it was cached. In both cases, once the session had been initialized and the data was available in the memory of the aggregator, queries for contextual information about specific epochs completed instantaneously.
We now analyze the probability that a qualifying event is missed by
our method of sampling. Consider an event with frequency ![]() , where
the corresponding counter reaches a value of
, where
the corresponding counter reaches a value of ![]() . Note that
. Note that ![]() is
never smaller than
is
never smaller than ![]() . The counter value
. The counter value ![]() could exceed
could exceed ![]() if one
or more other events with total frequency
if one
or more other events with total frequency ![]() collided with
it. The probability that
collided with
it. The probability that ![]() is dependent of the actual
distribution of the event frequencies. While such a distribution is
not known in general, we can use the total number of events (say
is dependent of the actual
distribution of the event frequencies. While such a distribution is
not known in general, we can use the total number of events (say ![]() )
observed during a monitoring interval, and the size of the HCA (number
of counters, say
)
observed during a monitoring interval, and the size of the HCA (number
of counters, say ![]() ) to estimate the probability of collisions.
Given such a distribution, the probability of false negatives can be
shown to be:
) to estimate the probability of collisions.
Given such a distribution, the probability of false negatives can be
shown to be:
![]()
where ![]() is
is
![]() , and
, and ![]() represents the
threshold below which nothing is sampled. Thus, the probability of
false negatives can be manipulated by varying the value of
represents the
threshold below which nothing is sampled. Thus, the probability of
false negatives can be manipulated by varying the value of ![]() and the
size of the HCA. In this way, these values can be adjusted so that
qualifying events are sampled with a very high probability even when
they collide with noise events in the HCA.
and the
size of the HCA. In this way, these values can be adjusted so that
qualifying events are sampled with a very high probability even when
they collide with noise events in the HCA.
Next, we experimentally evaluate this probability in the context of a
PlanetLab dataset by maintaining exact state for a small set of
events, for which collisions are resolved. The probability of false
negatives for a given vital sign is calculated as an average over
these events. At the time of initial deployment of Chopstix, trial and
error with this experiment was used to fix the value of the HCA data
structure for various vital signs. In our current configuration, in
which HCAs vary between 128 bytes and 4 kilobytes in size, the
probability of false negatives for each of the vital signs lies
between ![]() and
and ![]() . That is, Chopstix captures over
99.9% of the relevant events.
. That is, Chopstix captures over
99.9% of the relevant events.
For a problem to be diagnosed using Chopstix, it needs to satisfy two properties. First, it must have a measurable effect on the system's behavior. A logical bug that causes the generation of incorrect outputs in a program falls out of scope, unless the incorrect outputs are associated with a deviation in behavior; e.g., higher latency, smaller size of data leading to lower memory traffic, and so on. Second, the system must stay up for at least one Chopstix epoch from the time of the first manifestation of the problem. ``Red-button conditions'' that happen instantly whenever the appropriate trigger is set off, are not covered by Chopstix. Sometimes, even with these properties satisfied, the problem may not be captured on the vital signs in sufficient detail to yield a diagnosis. Still, our experience is that situations in which no progress is made at all in the diagnosis are rare.
Chopstix requires the kernel running on monitored nodes to be extended with a patch that implements the event triggers. The data collection mechanism is implemented as a pluggable kernel module. CPU utilization and L2-cache-miss performance counters should be supported by the processor for the corresponding vital signs to be activated. Software into which stack-trace-visibility is desired needs to be compiled with frame-pointer support. In order for instruction addresses to be translated into code sites, programs need to include debugging information--and their source code needs to be available on the centralize analysis server where the aggregator runs--not on the monitored node.
We do not believe that Chopstix needs any special OS support that ties it to Linux (or UNIX), as the vital signs of Chopstix are common across all OSes. Still, there are specific features, such as the retrieval of a pathname using a directory cookie, which will likely have to be reimplemented if it is ported to another OS. Event labels and event samples may also have to be populated otherwise depending on the specific implementation of callback functions and request-response semantics in the target OS. However, the high-level information conveyed by these items should stay the same.
A plethora of diagnostic tools are available. They are related to Chopstix through the mechanism they implement (e.g., profilers, monitors) or through their common purpose (e.g., interactive debuggers, deterministic replay tools, dynamic instrumentation tools). The former are geared more towards performance tuning than failure diagnostics and have fundamental differences at the mechanistic level, in spite of similarities. For example, Chopstix uses sketches to streamline its data and is hence able to collect numerous types of data in extensive detail. To the best of our knowledge, Chopstix is the first diagnostic tool to use such data collection technique. As for the latter set, Chopstix differentiates itself by attacking problems that cannot be reproduced or localized. To this end, Chopstix can be used in conjunction with many of these tools by helping to localize and characterize problems that can then be debugged using standard tools.
More specifically, DCPI (1) is a profiler designed to run continuously on production systems. The goal of DCPI is profiling to optimize system performance, not diagnosis to find faults and anomalies. This objective makes it focus on processor events that aid in uncovering inefficiencies at the instruction level, answering questions such as ``how long did a particular instruction stall on average because of a cache miss''. Its post-processing and visualization tools are also tailored to this purpose. Samples are accounted for deterministically and restricted to the process id and program counter. OProfile (12) is an implementation of the DCPI concept for Linux. We evaluate the performance of Chopstix against that of OProfile in Section 5.
Ganglia (8) is a cluster-monitoring tool that collects system-wide totals of several high-level variables; e.g., CPU utilization, throughput, free disk space for each monitored node. CoMon (21) is a distributed monitoring tool deployed on PlanetLab that is similar to Ganglia in its functioning. At the usability level, the difference between Chopstix and these tools is in the depth of information available and the type of variables monitored. Chopstix focuses on low-level variables and saves contextual detail while CoMon and Ganglia focus on high-level variables (uptime, boot state, free disk etc.) and track only system-wide totals. At the functional level, they serve a different purpose. The role of tools like CoMon and Ganglia is to help flag misbehaviors (e.g., ``a node went down'') while the role of Chopstix is to explain such misbehaviors.
Dtrace (3), kprobes (20) and JIT-i (19) facilitate the insertion of custom code into the OS kernel at run time. Such code can be used to perform arbitrary actions, but it is typically used to collect debugging information for fault diagnosis. These tools are difficult to apply to the type of problems addressed by Chopstix as they require the search space first be narrowed to a set of candidate code sites to be instrumented. Furthermore, there is no explicit provision to manage large amounts of data if the instrumented site is executed with a high frequency. On the other hand, these tools function well as companions to Chopstix, as they can be used to instrument code sites that Chopstix identifies as being of interest.
Recently, techniques have been developed to deal with system bugs without requiring an intervention from a programmer. Triage (27) and Rx (23) are tools that use lightweight re-execution support to respond to bugs in this way. Triage revisits the point of failure repeatedly in an attempt to isolate the condition that led to the bug. Rx on the other hand tries to eliminate such conditions. Both of these tools require a characterization of a problem to the extent of attributing it to a given application and defining the condition of failure (e.g., a segmentation fault at a given virtual address). This point reaffirms the value of Chopstix in providing such characterizations and completing the chain of diagnosis.
There have also been several tools for deterministic replay (26,13,9). These are alternative approaches to using Chopstix. These tools are typically invasive, imposing high CPU overheads, generating large volumes of data and requiring that systems be shut down for diagnosis. They are thus less appropriate for use on production systems. Other tools collect execution histories in the same way Chopstix does (28,17). However, the type of information they collect and the types of symptoms they handle are quite different from the ones in Chopstix.
Recent research has proposed the use of statistical clustering techniques to classify system state as being normal or erroneous (4,5). There are two points to make about this work. First, as currently envisioned, these techniques depend on user-defined Service-Level Objective functions to indicate when the state of the system is inconsistent with respect to low-level properties such as CPU utilization. This method is limited to a set of problems for which Service-Level Objectives are defined and have been annotated with a root-cause. In contrast, Chopstix enables diagnosis based on analysis of comprehensive event logs, enabling root-cause analysis in cases for which a objective functions do not (yet) exist. Second, looking beyond current techniques, we believe that Chopstix can leverage machine learning to enhance problem detection by automating the correlation between system failures and the collected vital signs. Such techniques might also be used to automate the correlation of symptoms that reveal root causes.
This paper describes Chopstix, a tool that helps track down the intermittent, non-reproducible problems that often make maintaining production systems a challenge. Chopstix captures misbehaviors by logging all behavior on the system in the form of succinct summaries that contain logs of low-level OS events. We think of these events as representing the system's vital signs, and the diagnosis problem as one of looking for symptoms that correspond to unusual variations in (and correlations among) these vitals. Using Chopstix, it is possible to isolate intermittent failures in enough detail to allow traditional debugging tools to be applied.
The key enabler for Chopstix is a randomized data structures called sketches, which results in a negligible overhead (1% CPU utilization) and high coverage (99.9% of the relevant events). We have used Chopstix to troubleshoot problems that we were not able to diagnose using existing tools.
The next step for Chopstix is to look for correlations across multiple monitored nodes to find network-wide bugs. We would also like to correlate Chopstix data with network-level flow logs, and to allow applications to be modified to add to the contextual state of event samples collected. Finally, we would like to add more automation to the post-processing tool-chain, perhaps through the use of machine learning techniques to classify symptoms.
We gratefully acknowledge feedback from the reviewers, our shepherd, Anthony Joseph, Andy Bavier, Charles Consel, Julia Lawall, Murtaza Motiwala, Jennifer Rexford and Vytautas Valancius. This work was funded, in part, by NSF grants CNS-0335214 and CNS-0520053.
This document was generated using the LaTeX2HTML translator Version 2002-2 (1.70)
Copyright © 1993, 1994, 1995, 1996,
Nikos Drakos,
Computer Based Learning Unit, University of Leeds.
Copyright © 1997, 1998, 1999,
Ross Moore,
Mathematics Department, Macquarie University, Sydney.
The command line arguments were:
latex2html -split 0 -show_section_numbers -local_icons -no_navigation bhatia_html
The translation was initiated by on 2008-10-08