CrystalBall: Predicting and Preventing Inconsistencies in Deployed Distributed Systems
Maysam Yabandeh, Nikola Knezevic, Dejan Kostic and Viktor Kuncak
School of Computer and Communication Sciences, EPFL, Switzerland
email: firstname.lastname@epfl.ch
Abstract
We propose a new approach for developing and deploying
distributed systems, in which nodes predict distributed
consequences of their actions, and use this information to
detect and avoid errors. Each node continuously runs a
state exploration algorithm on a recent consistent
snapshot of its neighborhood and predicts possible future
violations of specified safety properties. We describe a
new state exploration algorithm, consequence prediction,
which explores causally related chains of events that
lead to property violation.
This paper describes the design and implementation of this
approach, termed CrystalBall. We evaluate CrystalBall on RandTree,
BulletPrime, Paxos, and Chord distributed system implementations. We
identified new bugs in mature Mace implementations of three systems.
Furthermore, we show that if the bug is not corrected during
system development, CrystalBall is effective in steering the
execution away from inconsistent states at runtime.
1 Introduction
Complex distributed protocols and algorithms are used in enterprise storage systems, distributed databases, large-scale planetary systems, and sensor networks. Errors in these protocols translate to denial of service to some clients, potential loss of data, and monetary losses. The Internet itself is a large-scale distributed system, and there are recent proposals [19] to improve its routing reliability by further treating routing as a distributed consensus problem [26].
Design and implementation problems in these protocols have the potential to deny vital network connectivity to a large fraction of users.
Unfortunately, it is notoriously difficult
to develop reliable high-performance distributed systems
that run over asynchronous networks. Even if a distributed
system is based on a well-understood distributed algorithm,
its implementation can contain errors
arising from complexities of realistic distributed
environments or simply coding errors [27]. Many of these errors can only manifest after
the system has been running for a long time, has developed a
complex topology, and has experienced a particular sequence
of low-probability events such as node resets. Consequently,
it is difficult to detect such errors using testing and
model checking, and many of such errors remain unfixed after
the system is deployed.
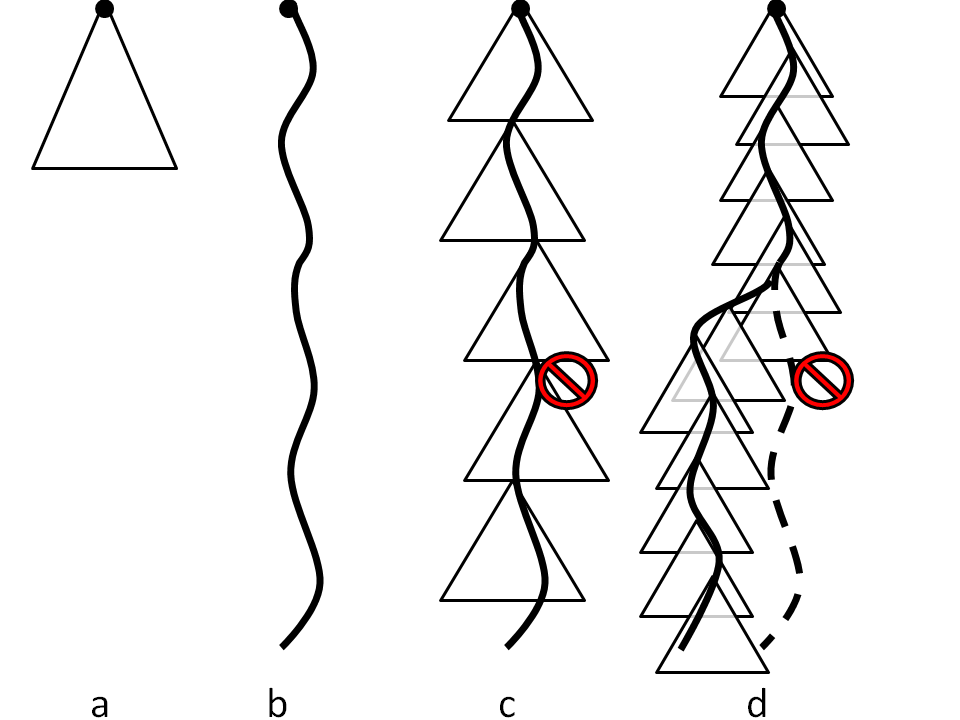 Figure 1: Execution path coverage by a) classic model checking, b) replay-based or live predicate checking,
c) CrystalBall in deep online debugging mode, and
d) CrystalBall in execution steering mode
. A triangle
represents the state space searched by the model checker;
a full line denotes an execution path of the system; a dashed line denotes an avoided
execution path that would lead to an inconsistency.
We propose to leverage increases in computing power and
bandwidth to make it easier to find errors in distributed systems,
and to increase the resilience of the deployed
systems with respect to any remaining errors.
In our approach, distributed system nodes
predict consequences of their actions while the system is
running. Each node runs a state exploration
algorithm on a consistent snapshot of its neighborhood and
predicts which actions can lead to violations of
user-specified consistency properties.
As Figure 1 illustrates,
the ability to detect future inconsistencies
allows us to address the problem of reliability in distributed
systems on two fronts: debugging and resilience.
Figure 1: Execution path coverage by a) classic model checking, b) replay-based or live predicate checking,
c) CrystalBall in deep online debugging mode, and
d) CrystalBall in execution steering mode
. A triangle
represents the state space searched by the model checker;
a full line denotes an execution path of the system; a dashed line denotes an avoided
execution path that would lead to an inconsistency.
We propose to leverage increases in computing power and
bandwidth to make it easier to find errors in distributed systems,
and to increase the resilience of the deployed
systems with respect to any remaining errors.
In our approach, distributed system nodes
predict consequences of their actions while the system is
running. Each node runs a state exploration
algorithm on a consistent snapshot of its neighborhood and
predicts which actions can lead to violations of
user-specified consistency properties.
As Figure 1 illustrates,
the ability to detect future inconsistencies
allows us to address the problem of reliability in distributed
systems on two fronts: debugging and resilience.
- Our technique enables deep online debugging because it explores
more states than live runs alone or model checking from the initial state. For each
state that a running system experiences, our technique
checks many additional states that the system
did not go through, but that it could reach in similar
executions. This approach combines benefits of
distributed debugging and model checking.
- Our technique aids resilience because a node can
modify its behavior to avoid a predicted inconsistency.
We call this approach execution steering.
Execution steering enables nodes to resolve
non-determinism in ways that aim to minimize future
inconsistencies.
To make this approach feasible, we need a fast state
exploration algorithm. We describe a new algorithm,
termed consequence prediction, which is efficient
enough to detect future violations of safety properties in
a running system. Using this approach we identified bugs
in Mace implementations of a random overlay tree,
and the
Chord distributed hash table. These implementations were
previously tested as well as model-checked by exhaustive
state exploration starting from the initial system state. Our
approach therefore enables the developer to uncover and
correct bugs that were not detected using previous
techniques. Moreover, we show that, if a bug is not
detected during system development, our approach is
effective in steering the execution away from erroneous
states, without significantly degrading the performance of
the distributed service.
1.1 Contributions
We summarize the contributions of this paper as follows:
- We introduce the concept of continuously executing a
state space exploration algorithm in parallel with a deployed
distributed system, and introduce an
algorithm that produces useful results even under tight
time constraints arising from runtime deployment;
- We describe a mechanism for feeding a consistent
snapshot of the neighborhood of a node in a large-scale
distributed system into a running model checker; the mechanism
enables reliable consequence prediction within limited
time and bandwidth constraints;
- We present execution steering, a technique that enables
the system to steer execution
away from possible inconsistencies;
- We describe CrystalBall, the implementation of our
approach on top of the Mace framework [21].
We evaluate
CrystalBall on RandTree, Bullet', Paxos, and Chord distributed system
implementations. CrystalBall detected several previously
unknown bugs that can cause system nodes to reach
inconsistent states.
Moreover, if the developer
is not in a position to fix these bugs, CrystalBall's
execution steering predicts
them in a deployed system and steers
execution away from them, all with an acceptable impact
on the overall system performance.
1.2 Example
We next describe an example of an inconsistency exhibited by a
distributed system, then show how CrystalBall predicts and avoids it.
The inconsistency appears in the Mace [21]
implementation of the RandTree overlay. RandTree implements a random,
degree-constrained overlay tree designed to be resilient to node
failures and network partitions. Trees built by an earlier version of
this protocol serve as a control tree for a number of large-scale
distributed services such as Bullet [23] and
RanSub [24]. In general, trees are used in a variety of
multicast scenarios [3,7] and data
collection/monitoring environments [17]. Inconsistencies
in these environments translate to denial of service to users, data
loss, inconsistent measurements, and suboptimal control decisions. The
RandTree implementation was previously manually debugged both in local- and wide-area
settings over a period of three years, as well as debugged
using an existing model checking approach [22], but, to
our knowledge, this inconsistency has not been discovered before (see
Section 4 for some of the additional bugs that
CrystalBall discovered).
RandTree Topology. Nodes in a RandTree overlay form
a directed tree of bounded degree. Each node maintains a list of its
children and the address of the root. The node with the numerically
smallest IP address acts as the root of the tree. Each non-root node
contains the address of its parent. Children of the root maintain a
sibling list. Note that, for a given node, its
parent, children, and siblings are all distinct nodes. The seemingly
simple task of maintaining a consistent tree topology is complicated
by the requirement for groups of nodes to agree on their roles (root,
parent, child, sibling) across asynchronous networks, in the face
of node failures, and machine slowdowns.
Joining the Overlay. A node nj joins
the overlay by issuing a Join request to one of
the designated nodes. If the node receiving the join
request is not the root, it forwards the request to the root.
If the root already has the maximal number of
children, it asks one of its children to incorporate the
node into the overlay. Once the request reaches a node
np whose number of children is less than maximum allowed, node
np inserts nj as one of its children, and notifies nj
about a successful join using a JoinReply message
(if np is the root, it also notifies its
other children about their new sibling nj using
an UpdateSibling message).
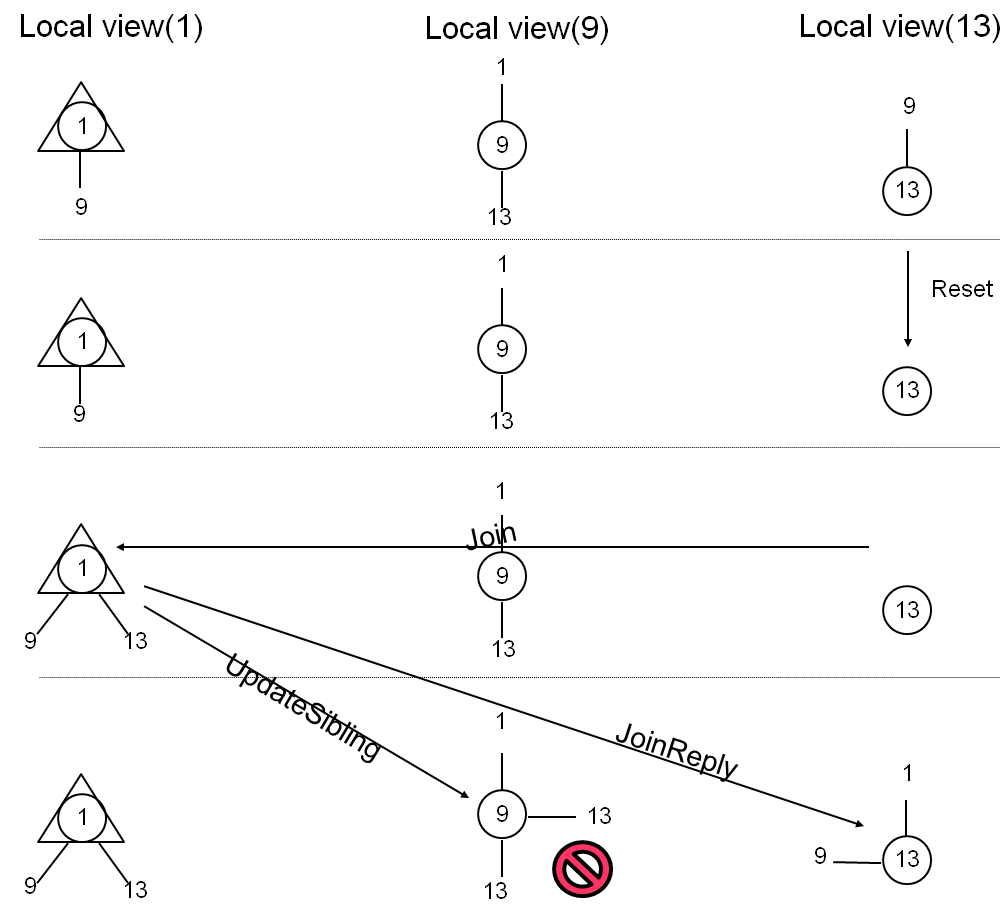 Safety property: children and siblings are disjoint lists
Figure 2: An inconsistency in a run of RandTree
Example System State.
The first row of Figure 2 shows a state of the system that we
encountered by running RandTree in the ModelNet
cluster [43] starting from the initial state.
We examine the local states of nodes n1, n9, and
n13. For each node n we display its neighborhood
view as a small graph whose central node is n itself,
marked with a circle. If a node is root and in a "joined" state,
we mark it with a triangle in its own view.
The state in the first row of Figure 2 is
formed by n13 joining as the only child of n9 and
then n1 joining and assuming the role of the new root
with n9 as its only child (n13 remains as the only
child of n9). Although the final state shown in first
row of Figure 2 is simple, it takes 13
steps of the distributed system (such as atomic handler
executions, including application events) to reach this state from the initial state.
Scenario Exhibiting Inconsistency.
Figure 2 describes a sequence of actions
that leads to a state that violates the consistency of the
tree. We use arrows to represent the sending and the
receiving of some of the relevant messages. A dashed line
separates distinct distributed system states (for simplicity
we skip certain intermediate states and omit some messages).
The sequence begins by a silent reset of node n13 (such
reset can be caused by, for example, a power failure).
After the reset, n13 attempts to join the overlay again.
The root n1 accepts the join request and adds n13 as
its child. Up to this point node n9 received no
information on actions that followed the reset of n13,
so n9 maintains n13 as its own child. When n1
accepts n13 as a child, it sends an UpdateSibling
message to n9. At this point, n9 simply inserts
n13 into the set of its sibling. As a result, n13
appears both in the list of children and in the list of
siblings of n9, which is inconsistent with the notion of
a tree.
Challenges in Finding Inconsistencies. We would
clearly like to avoid inconsistencies such as the one
appearing in Figure 2. Once we have realized
the presence of such inconsistency, we can, for example,
modify the handler for the
UpdateSibling message to remove the new sibling
from the children list.
Previously, researchers had successfully used explicit-state
model checking to identify inconsistencies in distributed
systems [22] and reported a number of safety
and liveness bugs in Mace implementations. However, due to
an exponential explosion of possible states, current
techniques capable of model checking distributed system
implementations take a prohibitively long time to identify
inconsistencies, even for seemingly short sequences such as the ones
needed to generate states in Figure 2. For example, when we applied the
Mace Model Checker's [22] exhaustive search to the safety properties
of RandTree starting from the initial state, it failed to
identify the inconsistency in Figure 2 even
after running for 17 hours
(on a 3.4-GHz Pentium-4
Xeon that we used for all our experiments in Section 4).
The reason for this long running time is the large number of states reachable
from the initial state up to the depth at which the bug occurs, all of
which are examined by an exhaustive search.
Safety property: children and siblings are disjoint lists
Figure 2: An inconsistency in a run of RandTree
Example System State.
The first row of Figure 2 shows a state of the system that we
encountered by running RandTree in the ModelNet
cluster [43] starting from the initial state.
We examine the local states of nodes n1, n9, and
n13. For each node n we display its neighborhood
view as a small graph whose central node is n itself,
marked with a circle. If a node is root and in a "joined" state,
we mark it with a triangle in its own view.
The state in the first row of Figure 2 is
formed by n13 joining as the only child of n9 and
then n1 joining and assuming the role of the new root
with n9 as its only child (n13 remains as the only
child of n9). Although the final state shown in first
row of Figure 2 is simple, it takes 13
steps of the distributed system (such as atomic handler
executions, including application events) to reach this state from the initial state.
Scenario Exhibiting Inconsistency.
Figure 2 describes a sequence of actions
that leads to a state that violates the consistency of the
tree. We use arrows to represent the sending and the
receiving of some of the relevant messages. A dashed line
separates distinct distributed system states (for simplicity
we skip certain intermediate states and omit some messages).
The sequence begins by a silent reset of node n13 (such
reset can be caused by, for example, a power failure).
After the reset, n13 attempts to join the overlay again.
The root n1 accepts the join request and adds n13 as
its child. Up to this point node n9 received no
information on actions that followed the reset of n13,
so n9 maintains n13 as its own child. When n1
accepts n13 as a child, it sends an UpdateSibling
message to n9. At this point, n9 simply inserts
n13 into the set of its sibling. As a result, n13
appears both in the list of children and in the list of
siblings of n9, which is inconsistent with the notion of
a tree.
Challenges in Finding Inconsistencies. We would
clearly like to avoid inconsistencies such as the one
appearing in Figure 2. Once we have realized
the presence of such inconsistency, we can, for example,
modify the handler for the
UpdateSibling message to remove the new sibling
from the children list.
Previously, researchers had successfully used explicit-state
model checking to identify inconsistencies in distributed
systems [22] and reported a number of safety
and liveness bugs in Mace implementations. However, due to
an exponential explosion of possible states, current
techniques capable of model checking distributed system
implementations take a prohibitively long time to identify
inconsistencies, even for seemingly short sequences such as the ones
needed to generate states in Figure 2. For example, when we applied the
Mace Model Checker's [22] exhaustive search to the safety properties
of RandTree starting from the initial state, it failed to
identify the inconsistency in Figure 2 even
after running for 17 hours
(on a 3.4-GHz Pentium-4
Xeon that we used for all our experiments in Section 4).
The reason for this long running time is the large number of states reachable
from the initial state up to the depth at which the bug occurs, all of
which are examined by an exhaustive search.
1.3 CrystalBall Overview
Instead of running the model checker from the initial state,
we propose to execute a model
checker concurrently with the running distributed system,
and continuously feed current system states into the model
checker. When, in our example, the system reaches the state
at the beginning of Figure 2, the model checker
will predict the state at the end of
Figure 2 as a possible future
inconsistency. In summary, instead of trying to predict all
possible inconsistencies starting from the initial state
(which for complex protocols means never exploring states
beyond the initialization phase), our model checker predicts
inconsistencies that can occur in a system that has been
running for a significant amount of time in a realistic environment.
As Figure 1 suggests,
compared to the standard model checking approach,
this approach identifies inconsistencies that can occur
within much longer system executions.
Compared to simply running the system
for a long time, our approach has two advantages.
- Our approach systematically covers a large number of
executions that contain low-probability events, such as
node resets that ultimately triggered the inconsistency in
Figure 2. It can take a very long time
for a running system to encounter such a scenario, which
makes testing for possible bugs difficult. Our technique
therefore improves system debugging by providing a new
technique that combines some of the advantages of
testing and static analysis.
- Our approach identifies inconsistencies before they
actually occur. This is possible because the model checker
can simulate packet transmission in time shorter than propagation
latency, and because it can simulate timer events in time shorter than
than the actual time delays.
This aspect of our approach opens an
entirely new possibility: adapt the behavior of the
running system on the fly and avoid an inconsistency. We
call this technique execution steering. Because it
does not rely on a history of past inconsistencies,
execution steering is applicable even to inconsistencies
that were previously never observed in past executions.
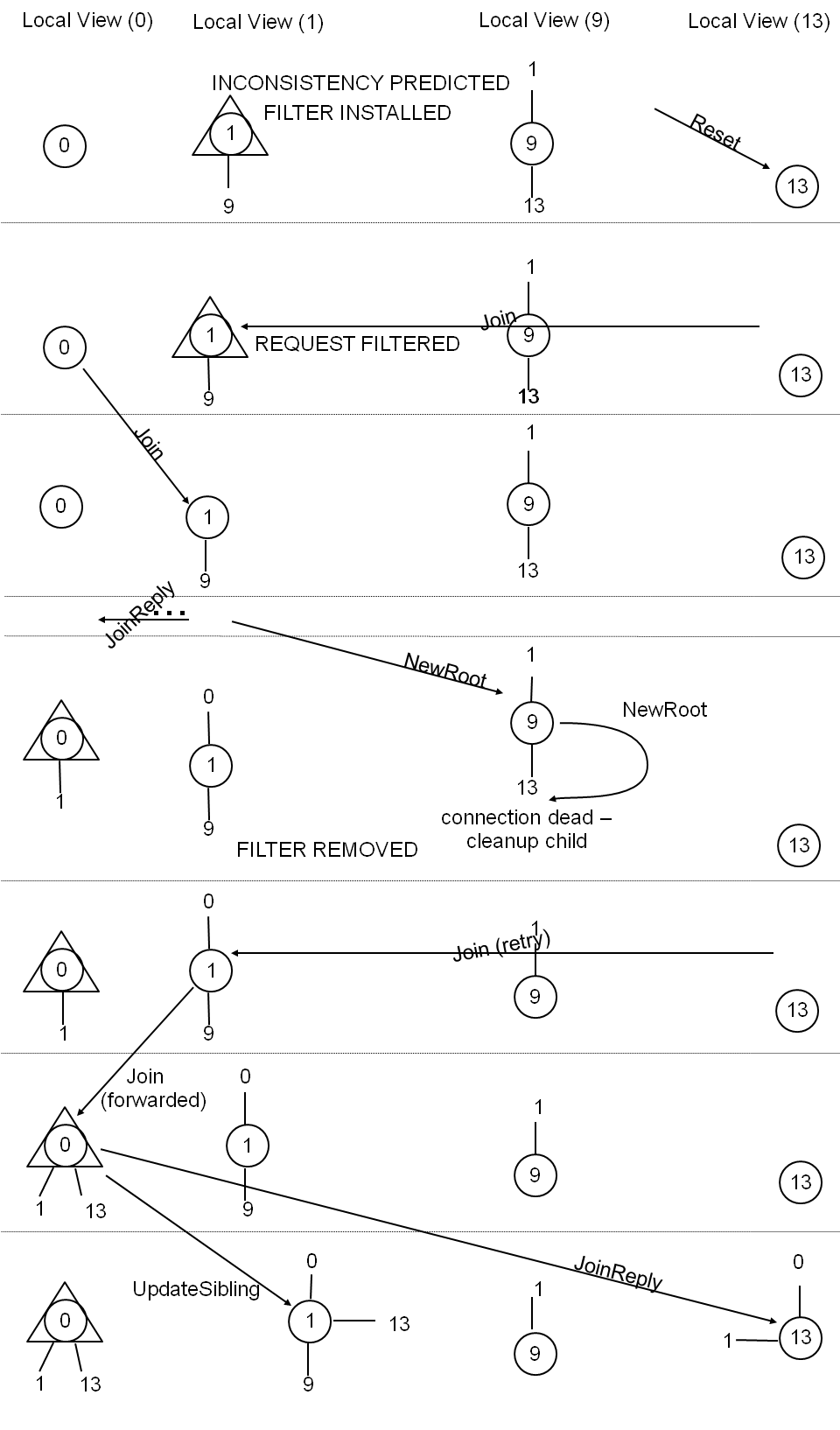 Figure 3: An Example execution sequence that avoids the
inconsistency from Figure 2
thanks to execution steering
.
Example of Execution Steering.
In our example, a model checking algorithm
running in n1 detects the violation at the end of
Figure 2. Given this knowledge, execution
steering causes node n1 not to respond to the join
request of n13 and to break the TCP connection with it. Node n13
eventually succeeds joining the random tree (perhaps after
some other nodes have joined first). The stale information
about n13 in n9 is removed once n9 discovers that
the stale communication channel with n13 is closed,
which occurs the first time when n9 attempts to
communicate with n13. Figure 3
presents one scenario illustrating this alternate
execution sequence. Effectively, execution steering has
exploited the non-determinism and robustness of the system to
choose an alternative execution path that does not contain
the inconsistency.
Figure 3: An Example execution sequence that avoids the
inconsistency from Figure 2
thanks to execution steering
.
Example of Execution Steering.
In our example, a model checking algorithm
running in n1 detects the violation at the end of
Figure 2. Given this knowledge, execution
steering causes node n1 not to respond to the join
request of n13 and to break the TCP connection with it. Node n13
eventually succeeds joining the random tree (perhaps after
some other nodes have joined first). The stale information
about n13 in n9 is removed once n9 discovers that
the stale communication channel with n13 is closed,
which occurs the first time when n9 attempts to
communicate with n13. Figure 3
presents one scenario illustrating this alternate
execution sequence. Effectively, execution steering has
exploited the non-determinism and robustness of the system to
choose an alternative execution path that does not contain
the inconsistency.
2 CrystalBall Design
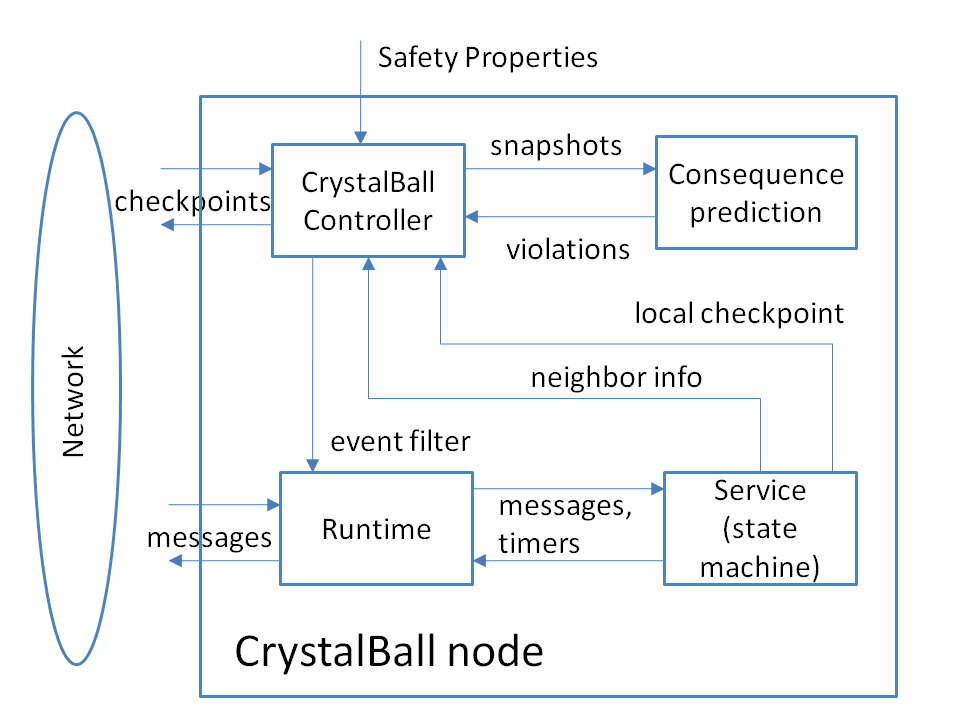 Figure 4:
High-level overview of CrystalBall
We next sketch the design of CrystalBall (see [44] for details).
Figure 4 shows the high-level overview of a
CrystalBall-enabled node.
We concentrate on distributed systems implemented as state machines, as this is a widely-used approach [21,25,26,37,39].
The state machine interfaces with the outside world via the runtime module. The runtime receives the messages coming from the network, demultiplexes them, and invokes the appropriate state machine handlers. The runtime also accepts application level messages from the state machines and manages the appropriate network connections to deliver them to the target machines. This module also maintains the timers on behalf of all services that are running.
The CrystalBall controller contains a checkpoint manager that periodically collects consistent snapshots of a node's neighborhood. The controller feeds them to the model checker, along with a checkpoint of the local state. The model checker runs the consequence prediction algorithm which checks user- or developer-defined properties and reports any violation in the form of a sequence of events that leads to an erroneous state.
CrystalBall can operate in two modes. In the deep online debugging mode the controller only outputs the information about the property violation. In the execution steering mode the controller examines the report from the model checker, prepares an event filter that can avoid the erroneous condition, checks the filter's impact, and installs it into the runtime if it is deemed to be safe.
Figure 4:
High-level overview of CrystalBall
We next sketch the design of CrystalBall (see [44] for details).
Figure 4 shows the high-level overview of a
CrystalBall-enabled node.
We concentrate on distributed systems implemented as state machines, as this is a widely-used approach [21,25,26,37,39].
The state machine interfaces with the outside world via the runtime module. The runtime receives the messages coming from the network, demultiplexes them, and invokes the appropriate state machine handlers. The runtime also accepts application level messages from the state machines and manages the appropriate network connections to deliver them to the target machines. This module also maintains the timers on behalf of all services that are running.
The CrystalBall controller contains a checkpoint manager that periodically collects consistent snapshots of a node's neighborhood. The controller feeds them to the model checker, along with a checkpoint of the local state. The model checker runs the consequence prediction algorithm which checks user- or developer-defined properties and reports any violation in the form of a sequence of events that leads to an erroneous state.
CrystalBall can operate in two modes. In the deep online debugging mode the controller only outputs the information about the property violation. In the execution steering mode the controller examines the report from the model checker, prepares an event filter that can avoid the erroneous condition, checks the filter's impact, and installs it into the runtime if it is deemed to be safe.
2.1 Consistent Neighborhood Snapshots
To check system properties, the model checker requires a
snapshot of the system-wide state. Ideally, every node would
have a consistent, up-to-date checkpoint of every other
participant's state. Doing so would give every node high
confidence in the reports produced by the model
checker. However, given that the nodes could be spread over
a high-latency wide-area network, this goal is
unattainable. In addition, the sheer amount of bandwidth
required to disseminate checkpoints might be excessive.
Given these fundamental limitations, we use a solution that
aims for scalability: we apply model checking to a
subset of all states in a distributed system. We
leverage the fact that in scalable systems a node typically
communicates with a small subset of other participants
("neighbors") and perform model checking only on this
neighborhood. In some distributed hash table implementations, a node
keeps track of O(logn) other nodes; in
mesh-based content distribution systems nodes communicate
with a constant number of peers;
or this number does not explicitly grow with the size of the system.
In a random
overlay tree, a node is typically aware of the root, its
parent, its children, and its siblings. We therefore
arrange for a node to distribute its state checkpoints to
its neighbors, and we refer to them as snapshot
neighborhood.
The checkpoint manager maintains checkpoints and snapshots. Other CrystalBall components can request an on-demand snapshot to be gathered by invoking an appropriate call on the checkpoint manager.
Discovering and Managing Snapshot Neighborhoods.
To propagate checkpoints, the checkpoint manager needs to know the set of a node's neighbors. This set is dependent upon a particular distributed service.
We use two techniques to provide this list. In the first scheme, we ask the developer to implement a method that will return the list of neighbors. The checkpoint manager then periodically queries the service and updates its snapshot neighborhood.
Since changing the service code might not always be
possible, our second technique uses a heuristic to
determine the snapshot neighborhood. Specifically, we
periodically query the runtime to obtain the list of open
connections (for TCP), and recent message recipients (for UDP). We then
cluster connection endpoints according to the communication
times, and selects a sufficiently large cluster of recent
connections.
Enforcing Snapshot Consistency.
To avoid false positives, we ensure that the neighborhood snapshot corresponds to a consistent view of a distributed system at some point of logical time.
There has been a large body of work in this area, starting with the seminal paper by Chandy and Lamport [5]. We use one of the recent algorithms for obtaining consistent snapshots [29], in which the general idea is to collect a set of checkpoints that do not violate the happens-before relationship [25] established by messages sent by the distributed service.
Instead of gathering a global snapshot, a node periodically sends a checkpoint request to the members of its snapshot neighborhood.
Even though nodes receive checkpoints only from a subset of
nodes, all distributed service and checkpointing messages are
instrumented to carry the checkpoint number (logical
clock) and each neighborhood snapshot is a fragment of a globally consistent snapshot.
In particular, a node that receives a message with a logical timestamp greater than its own logical clock
takes a forced checkpoint. The node then uses the forced checkpoint to contribute to
the consistent snapshot when asked for it.
Node failures are commonplace in distributed systems, and our algorithm has to deal with them. The checkpoint manager proclaims a node to be dead if it experiences a communication error (e.g., a broken TCP connection) with it while collecting a snapshot.
An additional cause for an apparent node failure is a change of a node's snapshot neighborhood in the normal course of operation (e.g., when a node changes parents in the random tree). In this case, the node triggers a new snapshot gather operation.
Checkpoint Content. Although the total footprint of
some services might be very large, this might not necessarily be
reflected in checkpoint size. For example, the Bullet' [23]
file distribution application has non-negligible total
footprint, but the actual file content transferred in
Bullet' does not play any role in consistency detection.
In general, the checkpoint content is given by a serialization
routine. The developer can choose to omit certain parts of
the state from serialized content and reconstruct them if
needed at de-serialization time. As a result, checkpoints
are smaller, and the code compensates the lack of serialized
state when a local state machine is being created from a
remote node's checkpoint in the model checker.
We use a set of well-known techniques for managing checkpoint storage (quotas) and controlling the bandwidth used by checkpoints (bandwidth limits, compression).
2.2 Consequence Prediction Algorithm
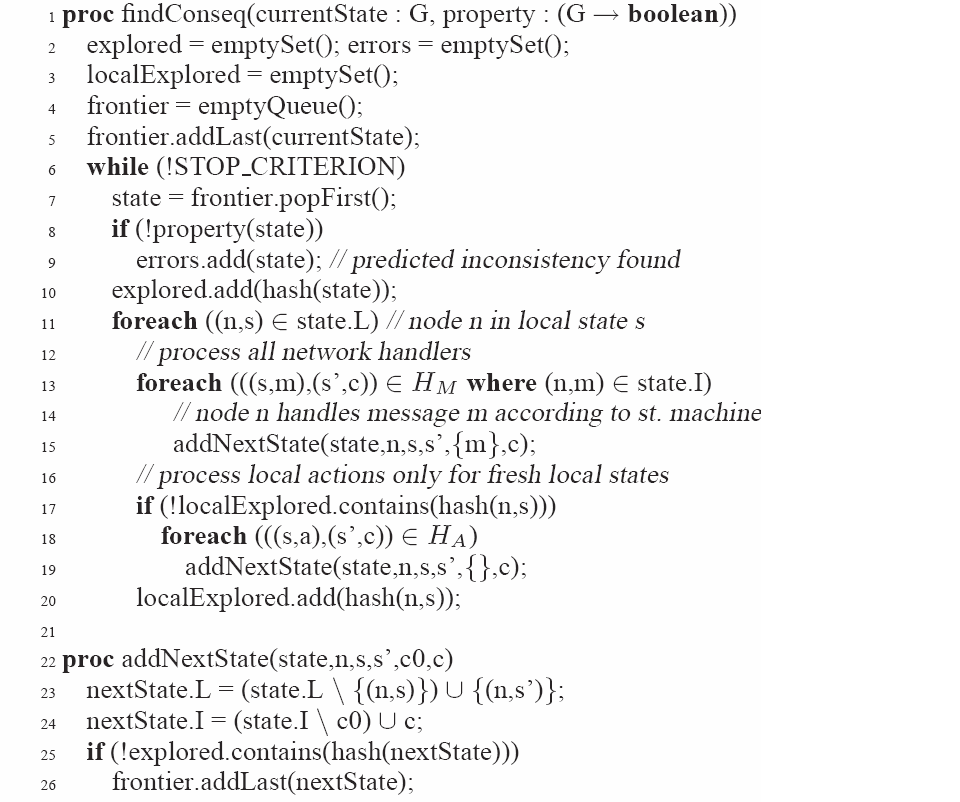
Figure 5: Consequence Prediction Algorithm
The key to enabling fast prediction of future inconsistencies in CrystalBall is our consequence prediction algorithm, presented in Figure 5.
For readability, we present the
algorithm as a refinement of a generic state-space search. The notation
is based on a high-level semantics of a distributed system, shown in Figure 6.
(Our concrete model checker implementation uses
an iterative deepening algorithm which combines memory
efficiency of depth-first search, while favoring the states
in the near future, as in breadth-first search.) The STOP_CRITERION
in Figure 5 in our case is given by
time constraints and external commands to restart the model checker
upon the arrival of a new snapshot.
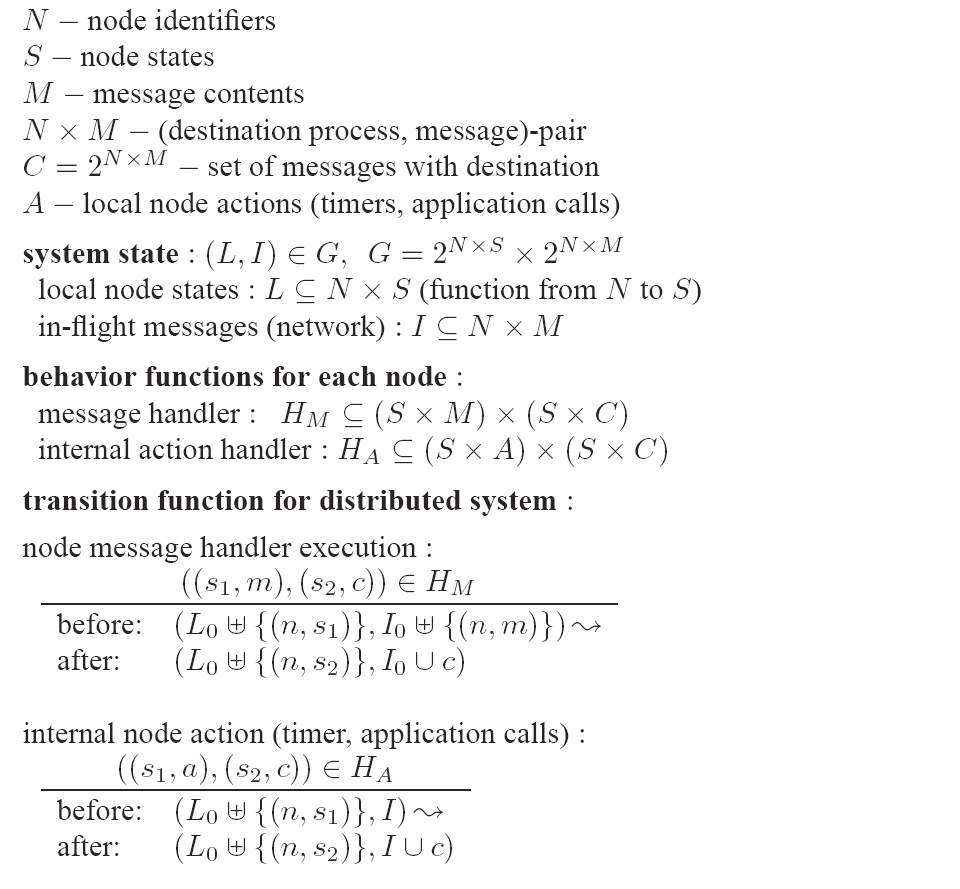
Figure 6: Simple Model of a Distributed System
In Line 8 of Figure 5 the
algorithm checks whether the explored state satisfies the
desired safety properties. The developer can use a simple
language [22]
that involves loops, existential and comparison
operators, state variables, and function invocations to specify
the properties.
Exploring Independent Chains. We can divide
the actions in a distributed system into event
chains, where each chain starts with an application or
scheduler event and continues by triggering network
events. We call two chains independent if no event of
the first chain changes state of a node involved in the
second chain. Consequence Prediction avoids exploring the
interleavings of independent chains.
Therefore, the test in Line 17 of
Figure 5 makes the algorithm
re-explore the
scheduler and application events of a node if and only if
the previous events changed the local state of the node.
For dependent chains, if a chain event changes local state
of a node, Consequence Prediction therefore explores all other
active chains which have been initiated from this node.
Note that hash(n,s) in Figure
5 implies that we have
separate tables corresponding to each node for keeping
hashed local states. If a state variable is not necessary
to distinguish two separate states, the user can annotate
the state variable that he or she does not want include in
the hash function, improving the performance of Consequence
Prediction.
Instead of holding all encountered hashes, the hash table
could be designed as a bounded cache to fit into
the L2 cache or main memory, favoring access speed while admitting
the possibility of re-exploring previously seen states.
Although simple,
the idea of removing from the search actions of nodes with
previously seen states eliminates many (uninteresting) interleavings from search and has a profound impact on the search
depth that the model checker can reach with a
limited time budget. This change was therefore key to enabling the
use of the model checker at runtime.
Knowing that
consequence prediction avoids considering certain states,
the question remains whether the remaining states are
sufficient to make the search useful. Ultimately, the
answer to this question comes from our evaluation (Section 4).
2.3 Execution Steering
CrystalBall's execution steering mode enables the system to
avoid entering an erroneous state by steering its execution
path away from predicted inconsistencies. If a protocol was
designed with execution steering in mind, the runtime system
could report a predicted inconsistency as a special
programming language exception, and allow the service to
react to the problem using a service-specific policy.
However, to measure the impact on existing implementations,
this paper focuses on generic runtime mechanisms that do not
require the developer to insert exception-handling code.
Event Filters.
Recall that a node in our framework operates as a state
machine and processes messages, timer events, and
application calls via handlers. Upon noticing that running
a certain handler can lead to an erroneous state,
CrystalBall installs an event filter, which
temporarily blocks the invocation of the state machine
handler for messages from the relevant sender.
The rationale is that a distributed system often contains a
large amount of non-determinism that allows it to proceed
even if certain transitions are disabled. For example, if
the offending message is a Join request in a random tree,
ignoring the message can prevent violating a local state
property. The joining nodes can later retry the procedure
with an alternative potential parent and successfully join
the tree. Similarly, if handling a message causes an
equivalent of a race condition manifested as an
inconsistency, delaying message handling allows the system
to proceed to the point where handling the message becomes
safe again.
Note that state machine handlers are atomic, so
CrystalBall is unlikely to interfere with any existing recovery
code.
Point of Intervention.
In general, execution steering can intervene at several
points in the execution path. Our current policy is to steer
the execution as early as possible. For example, if the
erroneous execution path involves a node issuing a
Join request after resetting, the system's first
interaction with that node occurs at the node which receives
its join request. If this node discovers the erroneous
path, it can install the event filter.
Non-Disruptiveness of Execution Steering.
Ideally, execution steering would always prevent
inconsistencies from occurring, without introducing new
inconsistencies due to a change in behavior. In general,
however, guaranteeing the absence of inconsistencies is as
difficult as guaranteeing that the entire program is
error-free. CrystalBall therefore makes execution steering
safe in practice through two mechanisms:
- Sound Choice of Filters. It is important that the
chosen corrective action does not sacrifice the soundness of
the state machine. A sound filtering is the one in
which the observed sequence of events after filtering is a
subset of possible sequence of events without filtering.
The breaking of a TCP connection is common in a distributed
system using TCP. Therefore, such distributed systems
include failure-handling code that deals with broken TCP
connections. This makes sending a TCP RST signal a good
candidate for a sound event filter, and is the filter we
choose to use in CrystalBall. In the case of communication over UDP,
the filter simply drops the UDP packet, which
could similarly happen in normal operation of the
network.
- Exploration of Corrected Executions.
Before allowing the event filter to perform an execution steering action, CrystalBall runs the consequence prediction
algorithm to check the effect of the event filter action on
the system.
If the consequence prediction algorithm does not suggest that the filter actions are safe, CrystalBall does not attempt execution steering and leaves the system to proceed as usual.
Rechecking Previously Discovered Violations. An event
filter reflects possible future inconsistencies reachable from the current
state, and leaving an event filter in place indefinitely
could deny service to some distributed system
participants. CrystalBall therefore removes the filters from the
runtime after every model checking run. However, it is
useful to quickly check whether the previously
identified error path can still lead to an erroneous
condition in a new model checking run. This is especially
important given the asynchronous nature of the model checker
relative to the system messages, which can prevent the model
checker from running long enough to rediscover the problem.
To prevent this from happening, the first step executed by the
model checker is to replay the previously discovered error
paths. If the problem reappears, CrystalBall immediately reinstalls
the appropriate filter.
Immediate Safety Check.
CrystalBall also supports immediate safety check, a
mechanism that avoids inconsistencies that would be caused
by executing the current handler. Such
imminent inconsistencies can happen even in the presence of
execution steering because 1) consequence prediction
explores states given by only a subset of all distributed
system nodes, and 2) the model checker runs asynchronously
and may not always detect inconsistencies in time. The
immediate safety check speculatively runs the handler,
checks the consistency properties in the resulting
state, and prevents actual handler execution if the resulting
state is inconsistent.
We have found that exclusively using immediate safety check
would not be sufficient for avoiding inconsistencies. The
advantages of installing event filters are: i) performance
benefits of avoiding the bug sooner, e.g., reducing
unnecessary message transmission, ii) faster reaction to an
error, which implies greater chance of avoiding a "point of
no return" after which error avoidance is impossible, and
iii) the node that is supposed to ultimately avoid the
inconsistency by immediate safety check might not have all
the checkpoints needed to notice the violation; this can
result in false negatives (as shown in Figure
9).
Liveness Issues. It is possible that by
applying an event filter would affect liveness properties of a
distributed system. In our experience, due to a large
amount of non-determinism (e.g., the node is bootstrapped
with a list of multiple nodes it can join), the system
usually finds a way to make progress. We focus on enforcing
safety properties, and we believe that occasionally
sacrificing liveness is a valid approach. According to a
negative result by Fischer, Lynch, and
Paterson [12], it is impossible to have
both in an asynchronous system anyway. (For example, the
Paxos [26] protocol guarantees safety but not liveness.)
2.4 Scope of Applicability
CrystalBall does not aim to find all errors; it is rather
designed to find and avoid important errors that can
manifest in real runs of the system. Results in
Section 4 demonstrate that CrystalBall works
well in practice. Nonetheless, we next discuss the
limitations of our approach and characterize the scenarios
in which we believe CrystalBall to be effective.
Up-to-Date Snapshots. For Consequence
Prediction to produce results relevant for execution
steering and immediate safety check, it needs to receive
sufficiently many node checkpoints sufficiently often.
(Thanks to snapshot consistency, this is not a problem for
deep online debugging.) We expect the stale
snapshots to be less of an issue with stable properties, e.g.,
those describing a deadlock condition [5].
Since the node's own checkpoint might be
stale (because of enforcing consistent neighborhood snapshots for checking
multi-node properties), immediate safety check is perhaps more
applicable to node-local properties.
Higher frequency of changes in
state variables requires higher frequency of snapshot
exchanges. High-frequency snapshot exchanges in principle
lead to: 1) more frequent model checker restarts (given the
difficulty in building incremental model checking
algorithms), and 2) high bandwidth consumption. Among the
examples for which our techniques is appropriate are
overlays in which state changes are infrequent.
Consequence Prediction as a Heuristic.
Consequence Prediction is a heuristic that explores a subset
of the search space. This is an expected limitation of
explicit-state model checking approaches applied to concrete
implementations of large software systems. The key question
in these approaches is directing the search towards most
interesting states. Consequence Prediction uses information
about the nature of the distributed system to guide the
search; the experimental results in
Section 4 show that it works well in
practice, but we expect that further enhancements are
possible.
3 Implementation Highlights
We built CrystalBall on top of the Mace [21]
framework. Mace allows distributed systems to be specified succinctly
and outputs high-performance C++ code. We implemented our consequence
prediction within the Mace model checker, and run the model checker as
a separate thread that communicates future inconsistencies to the
runtime. Our current implementation of the immediate safety check
executes the handler in a copy of the state machine's virtual memory
(using fork()), and holds the transmission of messages until the
successful completion of the consistency check. Upon encountering an
inconsistency in the copy, the runtime does not execute the handler in
the primary state machine. In case of applications with high
messaging/state change rates in which the performance of immediate
safety check is critical, we could obtain a state
checkpoint [41] before running the handler and
rollback to it in case of an encountered inconsistency. Another option
would be to employ operating system-level speculation
[32].
4 Evaluation
Our experimental evaluation addresses the following questions:
1) Is CrystalBall effective in finding bugs in live runs?
2) Can any of the bugs found by CrystalBall also be identified by
the MaceMC model checker alone?
3) Is execution steering capable of avoiding inconsistencies in
deployed distributed systems?
4) Are the CrystalBall-induced overheads within acceptable
levels?
4.1 Experimental Setup
We conducted our live experiments using
ModelNet [43]. ModelNet allows us to run live
code in a cluster of machines, while application packets are
subjected to packet delay, loss, and congestion typical of the
Internet. Our cluster consists of 17 older
machines with dual 3.4 GHz Pentium-4 Xeons with
hyper-threading, 8 machines with dual 2.33 GHz dual-core
Xeon 5140s, and 3 machines with 2.83 GHz Xeon X3360s (for
Paxos experiments). Older machines have 2 GB of RAM, while the newer
ones have 4 GB and 8 GB. These machines run GNU/Linux 2.6.17. One 3.4
GHz Pentium-4 machine running FreeBSD 4.9 served as the
ModelNet packet forwarder for these experiments. All
machines are interconnected with a full-rate 1-Gbps Ethernet
switch.
We consider two deployment scenarios. For our large-scale experiments with deep online debugging, we multiplex 100 logical end hosts running the distributed service across the 20 Linux machines, with 2 participants running the model checker on 2 different machines. We run with 6 participants for small-scale debugging experiments, one per machine.
We use a 5,000-node INET [6] topology that we further annotate with bandwidth capacities for each link. The INET topology preserves the power law distribution of node degrees in the Internet. We keep the latencies generated by the topology generator; the average network RTT is 130ms. We randomly assign participants to act as clients connected to one-degree stub nodes in the topology. We set transit-transit links to be 100 Mbps, while we set access links to 5 Mbps/1 Mbps inbound/outbound bandwidth. To emulate the effects of cross traffic, we instruct ModelNet to drop packets at random with a probability chosen uniformly at random between [0.001,0.005] separately for each link.
4.2 Deep Online Debugging Experience
We have used CrystalBall to find inconsistencies (violations of
safety properties) in two mature implemented protocols in
Mace, namely an overlay tree (RandTree) and a distributed hash
table (Chord [42]). These implementation
were not only manually debugged both in local- and wide-area
settings, but were also model checked using MaceMC
[22]. We have also used our tool to find
inconsistencies in Bullet', a file
distribution system that was originally implemented in MACEDON [37], and
then ported to Mace. We found 13 new subtle bugs
in these three systems that caused violation of safety
properties.
| System | Bugs found | LOC Mace/C++ |
| RandTree | 7 | 309 / 2000 |
| Chord | 3 | 254 / 2200 |
| Bullet' | 3 | 2870 / 19628 |
Table 1:
Summary of
inconsistencies found for each system using CrystalBall. LOC
stands for lines of code and reflects both the MACE code
size and the generated C++ code size. The low LOC
counts for Mace service implementations are a result of
Mace's ability to express these services succinctly. This number does not include the line counts for libraries and low-level services that services use from the Mace framework.
Table 1 summarizes the inconsistencies that
CrystalBall found in RandTree, Chord and Bullet'. Typical
elapsed times (wall clock time) until finding an
inconsistency in our runs have been from less than an hour
up to a day. This time allowed the system being debugged to
go through complex realistic scenarios.1 CrystalBall\
identified inconsistencies by running consequence prediction
from the current state of the system for up to several
hundred seconds. To demonstrate their depth and complexity,
we detail four out of 13 inconsistencies we found
in the three services we examined.
4.2.1 Example RandTree Bugs Found
We next discuss bugs we identified in the RandTree overlay
protocol presented in Section 1.2. We name
bugs according to the consistency properties that they
violate.
Children and Siblings Disjoint. The first
safety property we considered is that the children and
sibling lists should be disjoint. CrystalBall identified
the scenario from Figure 2 in
Section 1.2 that violates this property. The problem can be corrected by
removing the stale information about children in the handler for
the UpdateSibling message. CrystalBall also
identified variations of this bug that requires changes in
other handlers.
Recovery Timer Should Always Run. An important
safety property for RandTree is that the recovery timer
should always be scheduled. This timer periodically causes
the nodes to send Probe messages to the peer list
members with which it does not have direct connection. It is
vital for the tree's consistency to keep nodes up-to-date
about the global structure of the tree. The property was
written by the authors of [22] but the
authors did not report any violations of it. We believe that our
approach discovered it in part because our experiments considered
more complex join scenarios.
Scenario exhibiting inconsistency. CrystalBall found a
violation of the property in a state where node A joins itself, and changes its state
to "joined" but does not schedule any timers.
Although this does not cause problems immediately, the inconsistency
happens when another node B with smaller identifier tries to join, at which point A gives up the root
position, selects B as the root, and adds B it to its peer
list. At this point A has a non-empty peer list but no running timer.
Possible correction. Keep the timer scheduled even
when a node has an empty peer list.
4.2.2 Example Chord Bug Found
We next describe a violation of a consistency property in
Chord [42], a distributed hash table that
provides key-based routing functionality. Chord and other related distributed hash tables form a backbone of a large number of proposed and deployed distributed systems [17,35,38].
Chord Topology. Each Chord node is assigned a Chord id (effectively, a key). Nodes arrange themselves in an overlay ring where each node keeps pointers to its predecessor and successor. Even in the face of asynchronous message delivery and node failures, Chord has to maintain a ring in which the nodes are ordered according to their ids, and each node has a set of "fingers" that enables it to reach exponentially larger distances on the ring.
Joining the System. To join the Chord ring, a node
A first identifies its potential predecessor by querying with its id. This request is routed to the appropriate node P, which in turn replies to A. Upon receiving the reply, A inserts itself between P and P's
successor, and sends the appropriate messages to its predecessor and successor
nodes to update their pointers. A "stabilize" timer periodically updates these pointers.
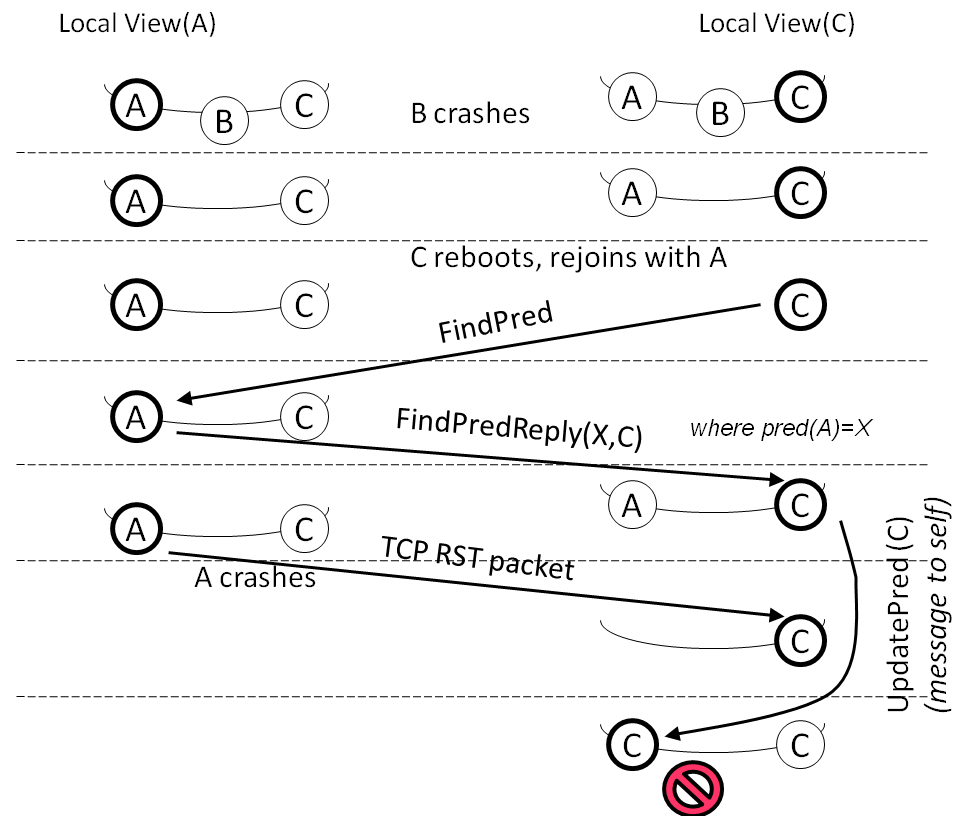 Figure 7: An inconsistency in a run of Chord. Node C has its predecessor pointing to itself while its successor list includes other nodes.
Property: If Successor is Self, So Is
Predecessor. If a predecessor of a node A equals A,
then its successor must also be A (because then A is the
only node in the ring). This is a safety property of Chord
that had been extensively checked using MaceMC, presumably
using both exhaustive search and random walks.
Scenario exhibiting inconsistency: CrystalBall found a
state where node A has A as a predecessor but has
another node B as its successor. This violation happens
at depths that are beyond those reachable by exhaustive search
from the initial state. Figure 7 shows the scenario. During live
execution, several nodes join the ring and all have a
consistent view of the ring. Three nodes A, B, and
C are placed consecutively on the ring, i.e., A is
predecessor of B and B is predecessor of C. Then B
experiences a node reset and other nodes which have
established TCP connection with B receive a TCP RST. Upon
receiving this error, node A removes B from its internal
data structures. As a consequence, Node A considers C as
its immediate successor.
Starting from this state, consequence prediction detects the
following scenario that leads to violation. C experiences
a node reset, losing all its state. C then tries to rejoin
the ring and sends a FindPred message to
A. Because nodes A and C did not have an established
TCP connection, A does not observe the reset of C. Node
A replies to C by a FindPredReply message
that shows A's successor to be C. Upon receiving this
message, node C i) sets its predecessor to A; ii) stores
the successor list included in the message as its successor
list; and iii) sends an UpdatePred message to A's
successor which, in this case, is C itself. After sending this
message, C receives a transport error from A and removes
A from all of its internal structures including
the predecessor pointer. In other words, C's predecessor would
be unset. Upon receiving the (loopback) message to itself,
C observes that the predecessor is unset and then sets it
to the sender of the UpdatePred message which is
C. Consequently, C has its predecessor pointing to
itself while its successor list includes other nodes.
Possible corrections. One possibility is for nodes
to avoid sending UpdatePred messages to
themselves (this appears to be a deliberate coding style in
Mace Chord). If we wish to preserve such coding
style, we can alternatively place a check after updating a
node's predecessor: if the successor list includes nodes in
addition to itself, avoid assigning the predecessor pointer
to itself.
Figure 7: An inconsistency in a run of Chord. Node C has its predecessor pointing to itself while its successor list includes other nodes.
Property: If Successor is Self, So Is
Predecessor. If a predecessor of a node A equals A,
then its successor must also be A (because then A is the
only node in the ring). This is a safety property of Chord
that had been extensively checked using MaceMC, presumably
using both exhaustive search and random walks.
Scenario exhibiting inconsistency: CrystalBall found a
state where node A has A as a predecessor but has
another node B as its successor. This violation happens
at depths that are beyond those reachable by exhaustive search
from the initial state. Figure 7 shows the scenario. During live
execution, several nodes join the ring and all have a
consistent view of the ring. Three nodes A, B, and
C are placed consecutively on the ring, i.e., A is
predecessor of B and B is predecessor of C. Then B
experiences a node reset and other nodes which have
established TCP connection with B receive a TCP RST. Upon
receiving this error, node A removes B from its internal
data structures. As a consequence, Node A considers C as
its immediate successor.
Starting from this state, consequence prediction detects the
following scenario that leads to violation. C experiences
a node reset, losing all its state. C then tries to rejoin
the ring and sends a FindPred message to
A. Because nodes A and C did not have an established
TCP connection, A does not observe the reset of C. Node
A replies to C by a FindPredReply message
that shows A's successor to be C. Upon receiving this
message, node C i) sets its predecessor to A; ii) stores
the successor list included in the message as its successor
list; and iii) sends an UpdatePred message to A's
successor which, in this case, is C itself. After sending this
message, C receives a transport error from A and removes
A from all of its internal structures including
the predecessor pointer. In other words, C's predecessor would
be unset. Upon receiving the (loopback) message to itself,
C observes that the predecessor is unset and then sets it
to the sender of the UpdatePred message which is
C. Consequently, C has its predecessor pointing to
itself while its successor list includes other nodes.
Possible corrections. One possibility is for nodes
to avoid sending UpdatePred messages to
themselves (this appears to be a deliberate coding style in
Mace Chord). If we wish to preserve such coding
style, we can alternatively place a check after updating a
node's predecessor: if the successor list includes nodes in
addition to itself, avoid assigning the predecessor pointer
to itself.
4.2.3 Example Bullet' Bug Found
Next, we describe our experience of applying CrystalBall to
the Bullet' [23] file distribution system. The
Bullet' source sends the blocks of the file to a subset of
nodes in the system; other nodes discover and retrieve
these blocks by explicitly requesting them. Every node keeps
a file map that describes blocks that it currently has. A
node participates in the discovery protocol driven by
RandTree, and peers with other nodes that have the most
disjoint data to offer to it. These peering relationships
form the overlay mesh.
Bullet' is more complex than RandTree, Chord (and tree-based overlay multicast protocols) because of 1) the need for senders to keep their receivers up-to-date with file map information, 2) the block request logic at the receiver, and 3) the finely-tuned mechanisms for achieving high throughput under dynamic conditions. The starting point for our exploration was property 1):
Sender's File Map and Receivers View of it Should Be Identical. Every sender keeps a "shadow" file map for each receiver informing it which are the blocks it has not told the receiver about. Similarly, a receiver keeps a file map that describes the blocks available at the sender. Senders use the shadow file map to compute "diffs" on-demand for receivers containing information about blocks that are "new" relative to the last diff.
Senders and receivers communicate over non-blocking TCP sockets that are under control of MaceTcpTransport. This transport queues data on top of the TCP socket buffer, and refuses new data when its buffer is full.
Scenario exhibiting inconsistency: In a live run lasting less than three minutes, CrystalBall quickly identified a mismatch between a sender's file map and the receiver's view of it. The problem occurs when the diff cannot be accepted by the underlying transport. The code then clears the receiver's shadow file map, which means that the sender will never try again to inform the receiver about the blocks containing that diff. Interestingly enough, this bug existed in the original MACEDON implementation, but there was an attempt to fix it by the UCSD researchers working on Mace. The attempted fix consisted of retrying later on to send a diff to the receiver. Unfortunately, since the programmer left the code for clearing the shadow file map after a failed send, all subsequent diff computations will miss the affected blocks.
Possible corrections. Once the inconsistency is
identified, the fix for the bug is easy and involves not
clearing the sender's file map for the given receiver when a
message cannot be queued in the underlying transport. The
next successful enqueuing of the diff will then correctly
include the block info.
4.3 Comparison with MaceMC
To establish the baseline for model checking performance and effectiveness, we installed our safety properties in the original version of MaceMC [22]. We then ran it for the three distributed services for which we identified safety violations. After 17 hours, exhaustive search did not identify any of the violations caught by CrystalBall, and reached the depth
of only Some of the specific depths reached by the model checker are as follows 1) RandTree with 5 nodes: 12 levels, 2) RandTree with 100 nodes: 1 level, 3) Chord with 5 nodes: 14 levels, and Chord with 100 nodes: 2 levels.
This illustrates the limitations of exhaustive search from the initial state.
In another experiment, we additionally employed random walk feature of MaceMC. Using this setup, MaceMC identified some of the bugs found by CrystalBall, but it still failed to identify 2 Randtree, 2 Chord, and 3 Bullet' bugs found by CrystalBall.
In Bullet', MaceMC found no bugs despite the fact that the search lasted 32 hours. Moreover, even for the bugs found, the long list of events that lead to a violation (on the order of hundreds) made it difficult for the programmer to identify the error (we spent five hours tracing one of the violations involving 30 steps). Such a long event list is unsuitable for execution steering, because it describes a low probability way of reaching the final erroneous state. In contrast, CrystalBall identified violations that are close to live executions and therefore more likely to occur in the immediate future.
4.4 Execution Steering Experience
We next evaluate the capability of CrystalBall as a runtime
mechanism for steering execution away from previously
unknown bugs.
4.4.1 RandTree Execution Steering
To estimate the impact of execution steering on deployed
systems, we instructed the CrystalBall controller to check
for violations of RandTree safety properties (including the
one described in Section 4.2.1). We
ran a live churn scenario in which one participant (process
in a cluster) per minute leaves and enters the system on
average, with 25 tree nodes mapped onto 25 physical cluster
machines. Every node was configured to run the model
checker. The experiment ran for 1.4 hours and resulted in the following data points,
which suggest that in practice the execution steering mechanism
is not disruptive for the behavior of the system.
When CrystalBall is not active, the system goes through a total
of 121 states that contain inconsistencies. When only the
immediate safety check but not the consequence prediction is
active, the immediate safety check engages 325 times, a
number that is higher because blocking a problematic action
causes further problematic actions to appear and be blocked
successfully. Finally, we consider the run in which both
execution steering and the immediate safety check (as a
fallback) are active. Execution steering detects a future
inconsistency 480 times, with 65 times concluding that
changing the behavior is unhelpful and 415 times modifying the
behavior of the system. The immediate safety check fallback
engages 160 times. Through a combined action of execution
steering and immediate safety check, CrystalBall avoided all
inconsistencies, so there were no uncaught violations (false
negatives) in this experiment.
To understand the impact of CrystalBall actions on the overall
system behavior, we measured the time needed for nodes to
join the tree. This allowed us to empirically address the
concern that TCP reset and message blocking actions can in
principle cause violations of liveness properties (in this
case extending the time nodes need to join the tree). Our
measurements indicated an average node join times between
0.8 and 0.9 seconds across different experiments, with
variance exceeding any difference
between the runs with and without CrystalBall. In summary,
CrystalBall changed system actions 415 times (2.77% of the total
of 14956 actions executed), avoided all specified inconsistencies,
and did not degrade system performance.
4.4.2 Paxos Execution Steering
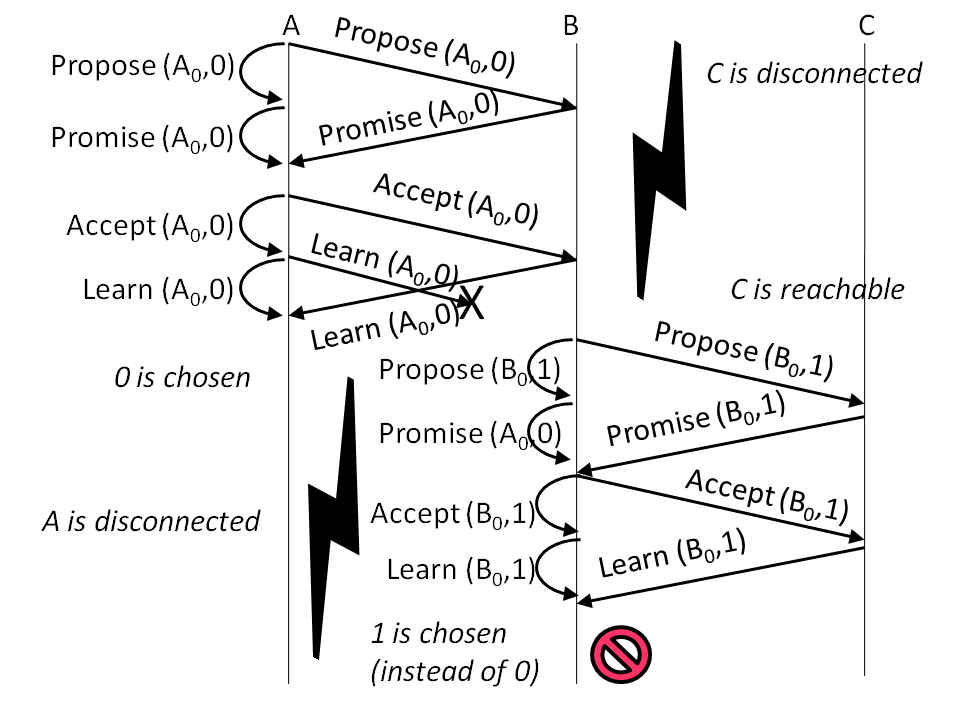 Figure 8: Scenario that exposes a previously reported Paxos violation of a safety property (two different values are chosen in the same instance).
Paxos [26] is a well known fault-tolerant protocol for achieving consensus in distributed systems. Recently, it has been successfully integrated in a number of deployed [4,28] and proposed [19] distributed systems. In this section, we show how execution steering can be applied to Paxos to steer away from realistic bugs that have occurred in previously deployed systems [4,28].
The Paxos protocol includes five steps:
Figure 8: Scenario that exposes a previously reported Paxos violation of a safety property (two different values are chosen in the same instance).
Paxos [26] is a well known fault-tolerant protocol for achieving consensus in distributed systems. Recently, it has been successfully integrated in a number of deployed [4,28] and proposed [19] distributed systems. In this section, we show how execution steering can be applied to Paxos to steer away from realistic bugs that have occurred in previously deployed systems [4,28].
The Paxos protocol includes five steps:
- A leader tries to take the leadership position by sending Prepare messages to acceptors, and it includes a unique round number in the message.
- Upon receiving a Prepare message, each acceptor consults the last promised round number. If the message's round number is greater than that number, the acceptor responds with a Promise message that contains the last accepted value if there is any.
- Once the leader receives a Promise message from the majority of acceptors, it broadcasts an Accept request to all acceptors. This message contains the value of the Promise message with the highest round number, or is any value if the responses reported no proposals.
- Upon the receipt of the Accept request, each acceptor accepts it by broadcasting a Learn message containing the Accepted value to the learners, unless it had made a promise to another leader in the meanwhile.
- By receiving Learn messages from the majority of the nodes, a learner considers the reported value as chosen.
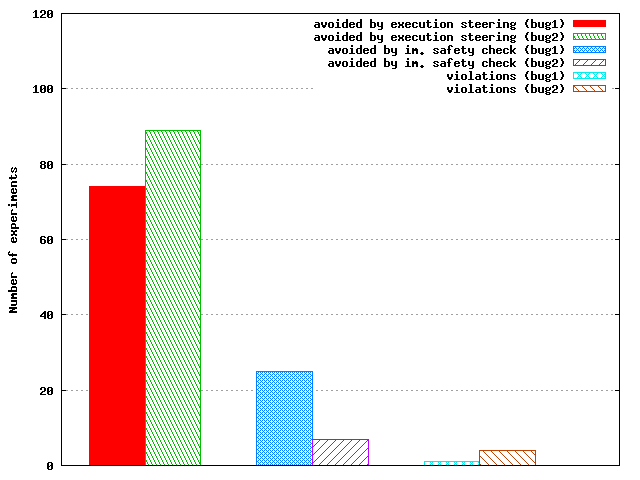 Figure 9: In 200 runs that expose Paxos safety violations due to two injected errors, CrystalBall successfully avoided the inconsistencies in all but 1 and 4 cases, respectively.
The implementation we used was a baseline Mace Paxos implementation that includes a minimal set of features. In general, a physical node can implement one or more of the roles (leader, acceptor, learner) in the Paxos algorithm; each node plays all the roles in our experiments. The safety property we installed is the original Paxos safety property: at most one value can be chosen, across all nodes.
The first bug we injected [28] is related to an implementation
error in step 3, and we refer to it as bug1:
once the leader receives the Promise message from the majority of
nodes, it creates the Accept request by using the submitted value from
the last Promise message instead of the Promise message with highest
round number. Because the rate at which the violation (due to the
injected error) occurs was low, we had to schedule some events to lead
the live run toward the violation in a repeatable way. The setup we
use comprises 3 nodes and two rounds, without any artificial packet
delays. As illustrated in
Figure 8, in the first
round the communication between node C and the other nodes is
broken. Also, a Learn packet is dropped from A to B. At the end of
this round, A chooses the value proposed by itself (0). In the second
round, the communication between A and other nodes is broken. At the
end of this round, the value proposed by node B (1) is chosen by B itself.
The second bug we injected (inspired by [4]) involves keeping a promise made by an Acceptor, even after crashes and reboots. As pointed in [4], it is often difficult to implement this aspect correctly, especially under various hardware failures. Hence, we inject an error in the way a promise is kept by not writing it to disk (we refer to it as bug2). To expose this bug we use a scenario similar to the one used for bug1, with the addition of a reset of node B.
To stress test CrystalBall's ability to avoid inconsistencies at
runtime, we repeat the live scenarios in the cluster 200
times (100 times for each bug) while varying the time between rounds
uniformly at random between 0 and 20 seconds. As we can see in Figure
9, CrystalBall's execution steering is
successful in avoiding the inconsistency at runtime 74% and 89% of the time for bug1 and bug2, respectively. In these cases, CrystalBall starts model checking after node C reconnects and receives checkpoints from other participants. After running the model checker for 3.3 seconds, C successfully predicts that the scenario in the second round would result in violation of the safety property, and it then installs the event filter. The avoidance by execution steering happens when C rejects the Propose message sent by B. Execution steering is more effective for bug2 than for bug1, as the former involves resetting B. This in turn leaves more time for the model checker to rediscover the problem by: i) consequence prediction, or ii) replaying a previously identified erroneous scenario. Immediate safety check engages 25% and 7% of the time, respectively (in cases when model checking did not have enough time to uncover the inconsistency), and prevents the inconsistency from occurring later, by dropping the Learn message from C at node B. CrystalBall could not prevent the violation for only 1% and 4% of the runs, respectively. The cause for these false negatives was the incompleteness of the set of checkpoints.
Figure 9: In 200 runs that expose Paxos safety violations due to two injected errors, CrystalBall successfully avoided the inconsistencies in all but 1 and 4 cases, respectively.
The implementation we used was a baseline Mace Paxos implementation that includes a minimal set of features. In general, a physical node can implement one or more of the roles (leader, acceptor, learner) in the Paxos algorithm; each node plays all the roles in our experiments. The safety property we installed is the original Paxos safety property: at most one value can be chosen, across all nodes.
The first bug we injected [28] is related to an implementation
error in step 3, and we refer to it as bug1:
once the leader receives the Promise message from the majority of
nodes, it creates the Accept request by using the submitted value from
the last Promise message instead of the Promise message with highest
round number. Because the rate at which the violation (due to the
injected error) occurs was low, we had to schedule some events to lead
the live run toward the violation in a repeatable way. The setup we
use comprises 3 nodes and two rounds, without any artificial packet
delays. As illustrated in
Figure 8, in the first
round the communication between node C and the other nodes is
broken. Also, a Learn packet is dropped from A to B. At the end of
this round, A chooses the value proposed by itself (0). In the second
round, the communication between A and other nodes is broken. At the
end of this round, the value proposed by node B (1) is chosen by B itself.
The second bug we injected (inspired by [4]) involves keeping a promise made by an Acceptor, even after crashes and reboots. As pointed in [4], it is often difficult to implement this aspect correctly, especially under various hardware failures. Hence, we inject an error in the way a promise is kept by not writing it to disk (we refer to it as bug2). To expose this bug we use a scenario similar to the one used for bug1, with the addition of a reset of node B.
To stress test CrystalBall's ability to avoid inconsistencies at
runtime, we repeat the live scenarios in the cluster 200
times (100 times for each bug) while varying the time between rounds
uniformly at random between 0 and 20 seconds. As we can see in Figure
9, CrystalBall's execution steering is
successful in avoiding the inconsistency at runtime 74% and 89% of the time for bug1 and bug2, respectively. In these cases, CrystalBall starts model checking after node C reconnects and receives checkpoints from other participants. After running the model checker for 3.3 seconds, C successfully predicts that the scenario in the second round would result in violation of the safety property, and it then installs the event filter. The avoidance by execution steering happens when C rejects the Propose message sent by B. Execution steering is more effective for bug2 than for bug1, as the former involves resetting B. This in turn leaves more time for the model checker to rediscover the problem by: i) consequence prediction, or ii) replaying a previously identified erroneous scenario. Immediate safety check engages 25% and 7% of the time, respectively (in cases when model checking did not have enough time to uncover the inconsistency), and prevents the inconsistency from occurring later, by dropping the Learn message from C at node B. CrystalBall could not prevent the violation for only 1% and 4% of the runs, respectively. The cause for these false negatives was the incompleteness of the set of checkpoints.
4.5 Performance Impact of CrystalBall
Memory, CPU, and bandwidth consumption. Because consequence prediction runs in a separate process that is most likely mapped to a different CPU core on modern processors, we expect little impact on the service performance. In addition, since the model checker does not cache previously visited states (it only stores their hashes) the memory is unlikely to become a bottleneck between the model-checking CPU core and the rest of the system.
One concern with state exploration such as model-checking is the memory consumption. Figure 10 shows the consequence prediction memory footprint as a function of search depth for our RandTree experiments. As expected, the consumed memory increases exponentially with search depth. However, since the effective CrystalBall's search depth in is less than 7 or 8, the consumed memory by the search tree is less than 1MB and can thus easily fit in the L2 or L3 (most recently) cache of the state of the art processors. Having the entire search tree in-cache reduces the access rate to main memory and improves performance.
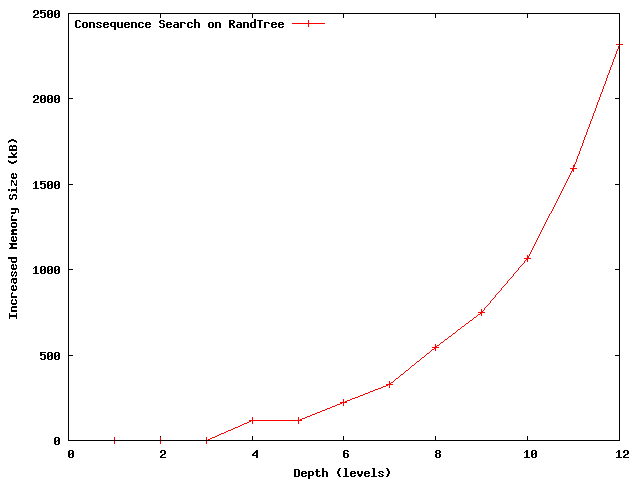 Figure 10: The memory consumed by consequence prediction (RandTree, depths 7 to 8) fits in an L2 CPU cache.
In the deep online debugging mode, the model checker was
running for 950 seconds on average in the 100-node case, and
253 seconds in the 6-node case. When running in the
execution steering mode (25 nodes), the model checker ran
for an average of about 10 seconds. The checkpointing interval was 10 seconds.
The average size of a RandTree node checkpoint is
176 bytes, while a Chord checkpoint requires 1028 bytes. Average
per-node bandwidth consumed by checkpoints for RandTree and Chord (100-nodes) was
803 bps and 8224 bps, respectively.
These figures show that overheads introduced by CrystalBall are low. Hence, we did not need to enforce any bandwidth limits in these cases.
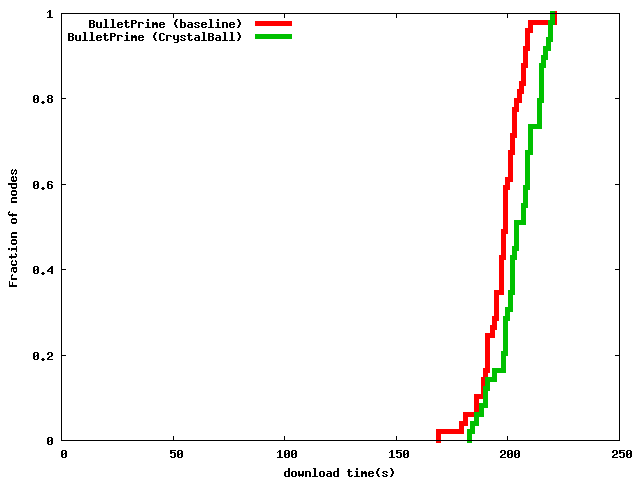
Figure 11: CrystalBall slows down Bullet' by less than 10% for a 20 MB file download.
Overhead from Checking Safety Properties.
In practice we did not find the overhead of checking safety properties to be a problem because: i) the number of nodes in a snapshot is small, ii) the most complex of our properties have O(n2) complexity, where n is the number of nodes, and iii) the state variables fit into L2 cache.
Overall Impact. Finally, we demonstrate that having CrystalBall monitor a bandwidth-intensive application featuring a non-negligible amount of state such as Bullet' does not significantly impact the application's performance. In this experiment, we instructed 49 Bullet' instances to download a 20 MB file. Bullet' is not a CPU intensive application, although computing the next block to request from a sender has to be done quickly. It is therefore interesting to note that in 34 cases during this experiment the Bullet' code was competing with the model checker for the Xeon CPU with hyper-threading. Figure 11 shows that in this case using CrystalBall reduced performance by less than 5%. Compressed Bullet' checkpoints were about 3 kB in size, and the bandwidth that was used for checkpoints was about 30 Kbps per node (3% of a node's outbound bandwidth of 1 Mbps). The reduction in performance is therefore primarily due to the
bandwidth consumed by checkpoints.
Figure 10: The memory consumed by consequence prediction (RandTree, depths 7 to 8) fits in an L2 CPU cache.
In the deep online debugging mode, the model checker was
running for 950 seconds on average in the 100-node case, and
253 seconds in the 6-node case. When running in the
execution steering mode (25 nodes), the model checker ran
for an average of about 10 seconds. The checkpointing interval was 10 seconds.
The average size of a RandTree node checkpoint is
176 bytes, while a Chord checkpoint requires 1028 bytes. Average
per-node bandwidth consumed by checkpoints for RandTree and Chord (100-nodes) was
803 bps and 8224 bps, respectively.
These figures show that overheads introduced by CrystalBall are low. Hence, we did not need to enforce any bandwidth limits in these cases.
Figure 11: CrystalBall slows down Bullet' by less than 10% for a 20 MB file download.
Overhead from Checking Safety Properties.
In practice we did not find the overhead of checking safety properties to be a problem because: i) the number of nodes in a snapshot is small, ii) the most complex of our properties have O(n2) complexity, where n is the number of nodes, and iii) the state variables fit into L2 cache.
Overall Impact. Finally, we demonstrate that having CrystalBall monitor a bandwidth-intensive application featuring a non-negligible amount of state such as Bullet' does not significantly impact the application's performance. In this experiment, we instructed 49 Bullet' instances to download a 20 MB file. Bullet' is not a CPU intensive application, although computing the next block to request from a sender has to be done quickly. It is therefore interesting to note that in 34 cases during this experiment the Bullet' code was competing with the model checker for the Xeon CPU with hyper-threading. Figure 11 shows that in this case using CrystalBall reduced performance by less than 5%. Compressed Bullet' checkpoints were about 3 kB in size, and the bandwidth that was used for checkpoints was about 30 Kbps per node (3% of a node's outbound bandwidth of 1 Mbps). The reduction in performance is therefore primarily due to the
bandwidth consumed by checkpoints.
5 Related Work
Debugging distributed systems is a notoriously difficult and tedious process. Developers typically start by using an ad-hoc logging technique, coupled with strenuous rounds of writing custom scripts to identify problems. Several categories of approaches have gone further than the naive method, and we explain them in more detail in the remainder of this section.
Collecting and Analyzing Logs. Several approaches
(Magpie [2],
Pip [34]) have successfully used extensive logging and
off-line analysis to identify performance problems and correctness
issues in distributed systems. Unlike these
approaches, CrystalBall works on deployed systems, and performs an online
analysis of the system state.
Deterministic Replay with Predicate
Checking. Friday [14] goes one step further
than logging to enable a gdb-like replay of distributed
systems, including watch points and checking for global
predicates. WiDS-checker [28] is a similar system
that relies on a combination of logging/checkpointing to
replay recorded runs and check for user predicate
violations. WiDS-checker can also work as a simulator. In
contrast to replay- and simulation-based systems,
CrystalBall explores additional states and can steer
execution away from erroneous states.
Online Predicate Checking. Singh et al. [40] have advocated debugging by online checking of distributed system state. Their approach involves launching queries across the distributed system that is described and deployed using the OverLog/P2 [40] declarative language/runtime combination. D3S [27] enables developers to specify global predicates which are then automatically checked in a deployed distributed system. By using binary instrumentation, D3S can work with legacy systems. Specialized checkers perform predicate-checking topology on snapshots of the nodes' states. To make the snapshot collection scalable, the checker's snapshot neighborhood can be manually configured by the developer. This work has shown that it is feasible to collect snapshots at runtime and check them against a set of user-specified properties. CrystalBall advances the state-of-the-art in online debugging in two main directions: 1) it employs an efficient algorithm for model checking from a live state to search for bugs "deeper" and "wider" than in the live run,
and it 2) enables execution steering to automatically prevent previously unidentified bugs from manifesting themselves in a deployed system.
Model Checking. Model checking techniques
for finite state systems [16,,] have proved successful
in analysis of concurrent finite state systems, but require
the developer to manually abstract the system into a
finite-state model which is accepted as the input to the
system.
Early efforts on explicit-state model checking of C and C++
implementations [31,30,46] have
primarily concentrated on a single-node view of the system.
MODIST [45] and MaceMC [22] represent the state-of-the-art in model checking distributed system implementations. MODIST [45] is capable of model checking unmodified distributed systems; it orchestrates state space exploration across a cluster of machines. MaceMC runs state machines for multiple nodes within the same process, and can determine safety and liveness violations spanning multiple nodes. MaceMC's exhaustive state exploration algorithm limits in practice the search depth and the number of nodes that can be checked. In contrast, CrystalBall's consequence prediction allows it to achieve significantly shorter running times for similar depths, thus enabling it to be deployed at runtime. In [22] the authors acknowledge the usefulness of prefix-based search, where the execution starts from a given supplied state. Our work addresses the question of obtaining prefixes for prefix-based search: we propose to directly feed into the model checker states as they are encountered in live system execution. Using CrystalBall we found bugs in code that was previously debugged in MaceMC and that we were not able to reproduce using MaceMC's search.
In summary, CrystalBall differs from MODIST and MaceMC by being able to run state space exploration from live state. Further,
CrystalBall supports execution steering that enables it to automatically prevent the system from entering an erroneous state.
Cartesian abstraction [1] is a technique for over-approximating state space
that treats different state components independently. The
independence idea is also present in our consequence prediction, but,
unlike
over-approximating analyses, bugs identified by consequence search are
guaranteed to be real with respect to the model explored.
The idea of disabling certain transitions in
state-space exploration appears in partial-order reduction
(POR)
[15],[13].
Our initial investigation suggests
that a POR algorithm takes considerably longer than
the consequence prediction algorithm. The advantage of POR is its
completeness, but completeness is of second-order importance
in our case because no complete search can terminate in a
reasonable amount of time for state spaces of distributed
system implementations.
Runtime Mechanisms. In the context of
operating systems, researchers have proposed mechanisms that
safely re-execute code in a changed environment to avoid
errors [33]. Such mechanisms become difficult to
deploy in the context of distributed systems. Distributed
transactions are a possible alternative to execution
steering, but involve several rounds of communication and
are inapplicable in environments such as wide-area
networks. A more lightweight solution involves forming a
FUSE [11] failure group among all nodes involved
in a join process. Making such approaches feasible would
require collecting snapshots of the system state, as in
CrystalBall. Our execution steering approach reduces the
amount of work for the developer because it does not require
code modifications. Moreover, our experimental results show
an acceptable computation and communication overhead.
In Vigilante [9] and Bouncer [8], end hosts
cooperate to detect and inform each other about worms that exploit
even previously unknown security holes.
Hosts protect themselves by generating filters that block bad
inputs. Relative to these systems, CrystalBall deals with distributed
system properties, and predicts inconsistencies before they occur.
Researchers have explored modifying actions of concurrent
programs to reduce data races
[18] by inserting
locks in an approach that does not employ running static
analysis at runtime.
Approaches that
modify state of a program at runtime include
[10,36];
these approaches enforce program invariants or memory consistency
without computing
consequences of changes to the state.
6 Conclusions
We presented a new approach for improving the reliability of
distributed systems, where nodes predict and avoid
inconsistencies before they occur, even if they have not
manifested in any previous run. We believe that our
approach is the first to give running distributed system
nodes access to such information about their future. To make
our approach feasible, we designed and implemented
consequence prediction, an algorithm for selectively
exploring future states of the system, and developed a
technique for obtaining consistent information about the
neighborhood of distributed system nodes. Our experiments
suggest that the resulting system, CrystalBall, is effective in
finding bugs that are difficult to detect by other means,
and can steer execution away from inconsistencies at runtime.
Acknowledgments
We thank our shepherd Arvind Krishnamurthy and the anonymous
reviewers who provided excellent feedback. We also thank Barbara Jobstmann
for useful discussions, James Anderson for his help with
the Mace Paxos implementation, and Charles Killian for answering
questions about MaceMC. Nikola Knezevic was
funded in part by a grant from the Hasler foundation (grant 2103).
References
- [1]
-
Thomas Ball, Andreas Podelski, and Sriram K. Rajamani.
Boolean and Cartesian Abstraction for Model Checking C
Programs.
In TACAS, 2001.
- [2]
-
Paul Barham, Austin Donnelly, Rebecca Isaacs, and Richard Mortier.
Using Magpie for Request Extraction and Workload Modelling.
In OSDI, 2004.
- [3]
-
Miguel Castro, Peter Druschel, Anne-Marie Kermarrec, Animesh Nandi, Antony
Rowstron, and Atul Singh.
Splitstream: High-bandwidth Content Distribution in Cooperative
Environments.
In SOSP, October 2003.
- [4]
-
Tushar D. Chandra, Robert Griesemer, and Joshua Redstone.
Paxos Made Live: an Engineering Perspective.
In PODC, 2007.
- [5]
-
K. Mani Chandy and Leslie Lamport.
Distributed Snapshots: Determining Global States of Distributed
Systems.
ACM Trans. Comput. Syst., 3(1):63-75, 1985.
- [6]
-
Hyunseok Chang, Ramesh Govindan, Sugih Jamin, Scott Shenker, and Walter
Willinger.
Towards Capturing Representative AS-Level Internet Topologies.
In SIGMETRICS, June 2002.
- [7]
-
Yang Chu, S. G. Rao, S. Seshan, and Hui Zhang.
A Case for End System Multicast.
Selected Areas in Communications, IEEE Journal on,
20(8):1456-1471, Oct 2002.
- [8]
-
Manuel Costa, Miguel Castro, Lidong Zhou, Lintao Zhang, and Marcus Peinado.
Bouncer: Securing Software by Blocking Bad Input.
In SOSP, 2007.
- [9]
-
Manuel Costa, Jon Crowcroft, Miguel Castro, Antony Rowstron, Lidong Zhou,
Lintao Zhang, and Paul Barham.
Vigilante: End-to-End Containment of Internet Worms.
In SOSP, October 2005.
- [10]
-
Brian Demsky and Martin Rinard.
Automatic Detection and Repair of Errors in Data Structures.
In OOPSLA, 2003.
- [11]
-
John Dunagan, Nicholas J. A. Harvey, Michael B. Jones, Dejan Kostic, Marvin
Theimer, and Alec Wolman.
FUSE: Lightweight Guaranteed Distributed Failure Notification.
In OSDI, 2004.
- [12]
-
M.J. Fischer, N.A. Lynch, and M.S. Paterson.
Impossibility of Distributed Consensus with One Faulty Process.
Journal of the ACM (JACM), 32(2):374-382, 1985.
- [13]
-
Cormac Flanagan and Patrice Godefroid.
Dynamic Partial-Order Reduction for Model Checking Software.
In POPL, 2005.
- [14]
-
Dennis Geels, Gautam Altekar, Petros Maniatis, Timothy Roscoe, and Ion Stoica.
Friday: Global Comprehension for Distributed Replay.
In NSDI, 2007.
- [15]
-
Patrice Godefroid and Pierre Wolper.
A Partial Approach to Model Checking.
Inf. Comput., 110(2):305-326, 1994.
- [16]
-
Gerard J. Holzmann.
The Model Checker SPIN.
IEEE Trans. Software Eng., 23(5):279-295, 1997.
- [17]
-
Navendu Jain, Prince Mahajan, Dmitry Kit, Praveen Yalagandula, Mike Dahlin, and
Yin Zhang.
Network Imprecision: A New Consistency Metric for Scalable
Monitoring.
In OSDI, December 2008.
- [18]
-
Muhammad Umar Janjua and Alan Mycroft.
Automatic Correction to Safety Violations.
In Thread Verification (TV06), 2006.
- [19]
-
John P. John, Ethan Katz-Bassett, Arvind Krishnamurthy, Thomas Anderson, and
Arun Venkataramani.
Consensus Routing: The Internet as a Distributed System.
In NSDI, San Francisco, April 2008.
- [20]
-
J.R. Burch, E.M. Clarke, K.L. McMillan, D.L. Dill, and L.J. Hwang.
Symbolic Model Checking: 1020 States and Beyond.
In LICS, 1990.
- [21]
-
Charles E. Killian, James W. Anderson, Ryan Braud, Ranjit Jhala, and Amin M.
Vahdat.
Mace: Language Support for Building Distributed Systems.
In PLDI, 2007.
- [22]
-
Charles E. Killian, James W. Anderson, Ranjit Jhala, and Amin Vahdat.
Life, Death, and the Critical Transition: Finding Liveness Bugs in
Systems Code.
In NSDI, 2007.
- [23]
-
Dejan Kostic, Ryan Braud, Charles Killian, Erik Vandekieft, James W.
Anderson, Alex C. Snoeren, and Amin Vahdat.
Maintaining High Bandwidth under Dynamic Network Conditions.
In USENIX ATC, 2005.
- [24]
-
Dejan Kostic, Adolfo Rodriguez, Jeannie Albrecht, Abhijeet Bhirud, and Amin
Vahdat.
Using Random Subsets to Build Scalable Network Services.
In USITS, 2003.
- [25]
-
Leslie Lamport.
Time, Clocks, and the Ordering of Events in a Distributed System.
Com. of the ACM, 21(7):558-565, 1978.
- [26]
-
Leslie Lamport.
The part-time parliament.
ACM Trans. Comput. Syst., 16(2):133-169, 1998.
- [27]
-
Xuezheng Liu, Zhenyu Guo, Xi Wang, Feibo Chen, Xiaochen Lian, Jian Tang, Ming
Wu, M. Frans Kaashoek, and Zheng Zhang.
D3S: Debugging Deployed Distributed Systems.
In NSDI, 2008.
- [28]
-
Xuezheng Liu, Wei Lin, Aimin Pan, and Zheng Zhang.
WiDS Checker: Combating Bugs in Distributed Systems.
In NSDI, 2007.
- [29]
-
D. Manivannan and Mukesh Singhal.
Asynchronous Recovery Without Using Vector Timestamps.
J. Parallel Distrib. Comput., 62(12):1695-1728, 2002.
- [30]
-
Madanlal Musuvathi and Dawson R. Engler.
Model Checking Large Network Protocol Implementations.
In NSDI, 2004.
- [31]
-
Madanlal Musuvathi, David Y. W. Park, Andy Chou, Dawson R. Engler, and David L.
Dill.
CMC: A Pragmatic Approach to Model Checking Real Code.
SIGOPS Oper. Syst. Rev., 36(SI):75-88, 2002.
- [32]
-
Edmund B. Nightingale, Peter M. Chen, and Jason Flinn.
Speculative Execution in a Distributed File System.
In SOSP, 2005.
- [33]
-
Feng Qin, Joseph Tucek, Jagadeesan Sundaresan, and Yuanyuan Zhou.
Rx: Treating Bugs as Allergies-a Safe Method to Survive Software
Failures.
In SOSP, 2005.
- [34]
-
Patrick Reynolds, Charles Killian, Janet L. Wiener, Jeffrey C. Mogul, Mehul A.
Shah, and Amin Vahdat.
Pip: Detecting the Unexpected in Distributed Systems.
In NSDI, 2006.
- [35]
-
Sean Rhea, Brighten Godfrey, Brad Karp, John Kubiatowicz, Sylvia Ratnasamy,
Scott Shenker, Ion Stoica, and Harlan Yu.
OpenDHT: A Public DHT Service and Its Uses.
In SIGCOMM, 2005.
- [36]
-
Martin C. Rinard, Cristian Cadar, Daniel Dumitran, Daniel M. Roy, Tudor Leu,
and William S. Beebee.
Enhancing Server Availability and Security Through Failure-Oblivious
Computing.
In OSDI, 2004.
- [37]
-
Adolfo Rodriguez, Charles Killian, Sooraj Bhat, Dejan Kostic, and Amin
Vahdat.
MACEDON: Methodology for Automatically Creating, Evaluating, and
Designing Overlay Networks.
In NSDI, 2004.
- [38]
-
Antony Rowstron and Peter Druschel.
Storage Management and Caching in PAST, a Large-Scale, Persistent
Peer-to-Peer Storage Utility.
In SOSP, 2001.
- [39]
-
Fred B. Schneider.
Implementing Fault-Tolerant Services Using the State Machine
Approach: a Tutorial.
ACM Comput. Surv., 22(4):299-319, 1990.
- [40]
-
Atul Singh, Petros Maniatis, Timothy Roscoe, and Peter Druschel.
Using Queries for Distributed Monitoring and Forensics.
SIGOPS Oper. Syst. Rev., 40(4):389-402, 2006.
- [41]
-
Sudarshan M. Srinivasan, Srikanth K, Christopher R. Andrews, and Yuanyuan Zhou.
Flashback: A Lightweight Extension for Rollback and Deterministic
Replay for Software Debugging.
In USENIX ATC, 2004.
- [42]
-
Ion Stoica, Robert Morris, David Liben-Nowell, David R. Karger, M. Frans
Kaashoek, Frank Dabek, and Hari Balakrishnan.
Chord: a Scalable Peer-to-Peer Lookup Protocol for Internet
Applications.
IEEE/ACM Trans. Netw., 11(1):17-32, 2003.
- [43]
-
Amin Vahdat, Ken Yocum, Kevin Walsh, Priya Mahadevan, Dejan Kostic, Jeff
Chase, and David Becker.
Scalability and Accuracy in a Large-Scale Network Emulator.
In OSDI, December 2002.
- [44]
-
Maysam Yabandeh, Nikola Knezevic, Dejan Kostic, and Viktor Kuncak.
CrystalBall: Predicting and Preventing Inconsistencies in
Deployed Distributed Systems.
Technical report, EPFL,
https://infoscience.epfl.ch/record/124918, 2008.
- [45]
-
Junfeng Yang, Tisheng Chen, Ming Wu, Zhilei Xu, Xuezheng Liu, Haoxiang Lin, Mao
Yang, Fan Long, Lintao Zhang, and Lidong Zhou.
MODIST: Transparent Model Checking of Unmodified Distributed
Systems.
In NSDI, April 2009.
- [46]
-
Junfeng Yang, Paul Twohey, Dawson Engler, and Madanlal Musuvathi.
Using Model Checking to Find Serious File System Errors.
ACM Trans. Comput. Syst., 24(4):393-423, 2006.
Footnotes:
1During this time,
the model checker ran concurrently with a normally
executing system. We therefore do not consider this time to
be wasted by the model checker before deployment; rather, it is the
time consumed by a running system.