4th USENIX Symposium on Networked Systems Design & Implementation
Pp. 243–256 of the Proceedings
Life, Death, and the Critical Transition:
Finding Liveness Bugs in Systems Code
Charles Killian, James W. Anderson, Ranjit Jhala, and Amin Vahdat
University of California, San Diego
{ckillian, jwanderson, jhala, vahdat}@cs.ucsd.edu
Abstract
Modern software model checkers find safety violations: breaches
where the system enters some bad state. However, we argue that
checking liveness properties offers both a richer and more natural
way to search for errors, particularly in complex concurrent
and distributed systems. Liveness properties specify desirable
system behaviors which must be satisfied eventually, but are not
always satisfied, perhaps as a result of failure or during system
initialization.
Existing software model checkers cannot verify liveness because
doing so requires finding an infinite execution that does not satisfy a
liveness property. We present heuristics to find a large class of
liveness violations and the critical transition of the execution. The
critical transition is the step in an execution that moves the
system from a state that does not currently satisfy some liveness
property—but where recovery is possible in the future—to a dead
state that can never achieve the liveness property. Our software
model checker, MaceMC, isolates complex liveness errors in our
implementations of Pastry, Chord, a reliable transport protocol,
and an overlay tree.
|
1 Introduction
Hard-to-find, non-reproducible bugs have long been the bane
of systems programmers. Such errors prove especially
challenging in unreliable distributed environments with
failures and asynchronous communication. For example, we
have run our Mace implementation of the Pastry [28]
overlay on the Internet and emulated environments for three
years with occasional unexplained erroneous behavior: somenodes are unable to rejoin the overlay after restarting. Unable
to recreate the behavior, we never succeeded in tracking down
the cause of the error.
Motivated by this and similarly subtle bugs, we turned to
model checking to assist us in building robust distributed
systems. Unfortunately, existing model checkers able to run
on systems implementations (rather than specifications) can
only find safety violations—counterexamples of a specified
condition that should always be true. Simple examples of
safety properties are assert() statements and unhandled
program exceptions. For our target systems however,
specifying global liveness properties—conditions that
should always eventually be true—proved to be more
desirable. In the above example, we wished to verify
that eventually all Pastry nodes would form a ring.
Somewhat paradoxically, specifying the appropriate safety
property requires knowledge of the nature of the bug,
whereas specifying the appropriate liveness property
only requires knowledge of desirable high-level system
properties. It is acceptable for a node to be unable to
join a ring temporarily, but in our case, the bug made it
impossible for a node to ever join the ring, thus violating
liveness.
Existing software model checkers focus on safety properties
because verifying liveness poses a far greater challenge: the
model checker cannot know when the properties should be
satisfied. Identifying a liveness violation requires finding an
infinite execution that will not ever satisfy the liveness
property, making it impractical to find such violating infinite
executions in real implementations. Thus, we set out to
develop practical heuristics that enable software model
checkers to determine whether a system satisfies a set of
liveness properties.
We present MaceMC, the first software model checker
that helps programmers find liveness violations in complex
systems implementations. We built our solution upon three
key insights:
-
-
-
-
Life: To find subtle, complicated bugs in distributed
systems, we should search for liveness violations in
addition to safety violations. Liveness properties free
us from only specifying what ought not happen—that
is, error conditions and invariants, which may be
hopelessly complicated or simply unknown—and
instead let us specify what ought to happen.
-
-
Death: Instead of searching for general liveness
violations, which require finding violating infinite
executions, we focus on a large subset: those that enter
dead states from which liveness can never be achieved
regardless of any subsequent actions. We thereby
reduce the problem of determining liveness to searching
for violations of previously unknown safety properties.
We present a novel heuristic to identify dead states
and locate executions leading to them by combining
exhaustive search with long random executions.
-
-
Critical Transition: To understand and fix a liveness
error, the developer must painstakingly analyze the
tens of thousands of steps of the non-live execution
to find where and how the system became dead. We
show how to extend our random execution technique
to automatically search for the critical transition, the
step that irrecoverably cuts off all possibility of ever
reaching a live state in the future.
To further help the programmer understand the cause of an
error, we developed Mdb, an interactive debugger providing
forward and backward stepping through global events,
per-node state inspection, and event graph visualization. In
our experience, Mdb, together with the critical transition
automatically found by MaceMC, reduced the typical human
time required to find and fix liveness violations from a few
hours to less than 20 minutes.
Using MaceMC and Mdb, we found our Pastry bug:
under certain circumstances, a node attempting to rejoin a
Pastry ring using the same identifier was unable to join
because its join messages were forwarded to unjoined nodes.
This error was both sufficiently obscure and difficult to fix that
we decided to check how FreePastry [1], the reference
implementation, dealt with this problem. The following log
entry in a recent version of the code (1.4.3) suggests that FreePastry likely observed a similar problem: “Dropped
JoinRequest on rapid rejoin problem – There was a problem
with nodes not being able to quickly rejoin if they used the
same NodeId. Didn’t find the cause of this bug, but can no
longer reproduce.”
We have found 52 bugs using MaceMC thus far across a
variety of complex systems. While our experience is restricted
to MaceMC, we believe our random execution algorithms
for finding liveness violations and the critical transition
generalize to any state-exploration model checker capable of
replaying executions. It should therefore be possible to use
this technique with systems prepared for other model checkers
by defining liveness properties for those systems. Although
our approach to finding liveness violations is necessarily a
heuristic—a proof of a liveness violation requires finding an
infinite execution that never satisfies liveness—we have not
had any false positives among the set of identified violations
to date.
2 System Model
Software model checkers find errors by exploring the space of
possible executions for systems implementations. We
establish the MaceMC system model with our simplified
definitions of programs and properties (see [19] for the
classical definitions). We then discuss the relationship
between liveness and safety properties.
Distributed Systems as Programs We model-check
distributed systems by composing every node and a simulated
network environment in a single program (cf. §4.1 for the
details of preparing unmodified systems for model checking).
A program state is an assignment of values to variables. A
transition maps an input state to an output state. A program
comprises a set of variables, a set of initial states, and a set of
transitions. A program execution is an infinite sequence of
states, beginning in an initial program state, with every
subsequent state resulting from the application of some
transition (an atomic set of machine instructions) to its
predecessor. Intuitively, the set of variables corresponds to
those of every node together with the distributed environment,
such as the messages in the network. Thus, a state encodes a
snapshot of the entire distributed system at a given instant in
time.
Conceptually, each node maintains a set of pending events.
At each step in the execution, the model checker selects one of
the nodes and an event pending at that node. The model
checker then runs the appropriate event handler to transition
the system to a new state. The handler may send messages
that get added to event queues of destination nodes or
schedule timers to add more events to its pending set. Upon
completing an event handler, control returns to the model
checker and we repeat the process. Each program execution
corresponds to a scheduling of interleaved events and a
sequence of transitions.
| Table 1: | Example predicates from systems tested using MaceMC. Eventually refers here to Always Eventually corresponding
to Liveness properties, and Always corresponds to Safety properties. The syntax allows a regular expression expansion ‘*’, used in
the AllNodes property. |
|
Properties A state predicate is a logical predicate over the
program variables. Each state predicate evaluates to TRUE or
FALSE in any given state. We say that a state satisfies
(resp., violates) a state predicate if the predicate evaluates to
TRUE (resp., FALSE) in the state. -
-
-
-
Safety Property: a statement of the form always p where
p is a safety (state) predicate. An execution satisfies a
safety property if every state in the execution satisfies
p. Conversely, an execution violates a safety property if
some state in the execution violates p.
-
-
Liveness Property: a statement of the form always
eventually p where p is a liveness (state) predicate.
We define program states to be in exactly one of three
categories with respect to a liveness property: live,
dead, or transient. A live state satisfies p. A transient
state does not satisfy p, but some execution through the
state leads to a live state. A dead state does not satisfy p,
and no execution through the state leads to a live state.
An execution satisfies a liveness property if every suffix
of the execution contains a live state. In other words,
an execution satisfies the liveness property if the system
enters a live state infinitely often during the execution.
Conversely, an execution violates a liveness property if
the execution has a suffix without any live states.
It is important to stress that liveness properties, unlike safety
properties, apply over entire program executions rather than
individual states. Classically, states cannot be called live (only
executions)—we use the term live state for clarity. The
intuition behind the definition of liveness properties is that any
violation of a liveness state predicate should only be
temporary: in any live execution, regardless of some violating
states, there must be a future state in the execution satisfying
the liveness predicate.
Table 1 shows example predicates from systems we have
tested in MaceMC. We use the same liveness predicate for
Pastry and Chord, as both form rings with successor
pointers.
Liveness/Safety Duality We divide executions violating
liveness into two categories: Transient-state and Dead-state.
Transient-state (TS) liveness violations correspond to
executions with a suffix containing only transient states. For
example, consider a system comprising two servers and a
randomized job scheduling process. The liveness property is
that eventually, the cumulative load should be balanced
between the servers. In one TS liveness violation, the job scheduling process repeatedly prefers one server over the
other. Along a resulting infinite execution, the cumulative load
is never balanced. However, at every point along this
execution, it is possible for the system to recover, e.g.,
the scheduler could have balanced the load by giving
enough jobs to the underutilized server. Thus, all violating
states are transient and the system never enters a dead
state.
Dead-state (DS) liveness violations correspond to an
execution with any dead state (by definition all states
following a dead state must also be dead because recovery is
impossible). Here, the violating execution takes a critical
transition from the last transient (or live) state to the first dead
state. For example, when checking an overlay tree (cf. §6),
we found a violating execution of the “OneRoot” liveness
state predicate in Table 1, in which two trees formed
independently and never merged. The critical transition
incorrectly left the recovery timer of a node A unscheduled in
the presence of disjoint trees. Because only A had knowledge
of members in the other tree, the protocol had no means to
recover.
Our work focuses on finding DS liveness violations. We
could have found these violations by using safety properties
specifying that the system never enters the corresponding
dead states. Unfortunately, these safety properties are often
impossible to identify a priori. For instance, consider
the liveness property “AllNodes” for Chord shown in
Table 1: eventually, all nodes should be reachable by
following successor pointers. We found a violation of this
property caused by our failure to maintain the invariant that
in a one-node ring, a node’s predecessor and successor
should be itself. Upon finding this error, we added the
corresponding safety property for Chord. While we now
see this as an “obvious” safety property, we argue that
exhaustively listing all such safety properties a priori is
much more difficult than specifying desirable liveness
properties.
Moreover, liveness properties can identify errors that in
practice are infeasible to find using safety properties. Consider
the “AllAcked” property for our implementation of a transport
protocol, shown in Table 1. The property is for the test
application, which sends a configurable total number of
messages to a destination. It states that all sent messages
should eventually be acknowledged by the destination
(assuming no permanent failures): the transport adds a
message to the inflight queue upon sending and removes it
when it is acknowledged. The corresponding safety property
would have to capture the following: “Always, for each
message in the inflight queue or retransmission timer
queue, either the message is in flight (in the network), or in
the destination’s receive socket buffer, or the receiver’s
corresponding IncomingConnection.next is less than the
message sequence number, or an acknowledgment is in flight
from the destination to the sender with a sequence number
greater than or equal to the message sequence number, or the
same acknowledgment is in the sender’s receive socket buffer,
or a reset message is in flight between the sender and receiver
(in either direction), or …” Thus, attempting to specify
certain conditions with safety properties quickly becomes
overwhelming and hopelessly complicated, especially
when contrasted with the simplicity and succinctness of
the liveness property: “Eventually, for all n in nodes,
n.inflightSize() = 0,” i.e., that eventually there should be no
packets in flight.
Thus, we recommend the following iterative process for
finding subtle protocol errors in complex concurrent
environments. A developer begins by writing desirable
high-level liveness properties. As these liveness properties
typically define the correct system behavior in steady-state
operation, they are relatively easy to specify. Developers can
then leverage insight from DS liveness violations to add new
safety properties. In Table 1, we show safety properties that
became apparent while analyzing the corresponding DS
liveness violations. While safety properties are often
less intuitive, the errors they catch are typically easier to
understand—the bugs usually do not involve complex
global state and lie close to the operations that trigger the
violations.
3 Model Checking with MaceMC
This section presents our algorithms for finding liveness and
safety violations in systems implementations. We find
potential liveness violations via a three-step state exploration
process. While our techniques do not present proofs for the
existence of a liveness violation, we have thus far observed no
false positives. In practice, all flagged violations must be
human-verified, which is reasonable since they point to bugs
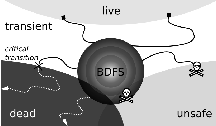
which must be fixed. As shown in Figure 1, our process
isolates executions leading the system to dead states where
recovery to a configuration satisfying the liveness state
predicate becomes impossible.
Step 1: Bounded depth-first search (BDFS) We begin by
searching from an initial state with a bounded depth-first
search. We exhaustively explore all executions up to some
fixed depth in a depth-first manner and then repeat with an
increased depth bound. Due to state explosion, we can only
exhaustively explore up to a relatively shallow depth of
transitions (on the order of 25-30); as system initialization
typically takes many more transitions (cf. Figure 2), the vast
majority of states reached at the periphery of the exhaustive
search are not live. We call these states indeterminate because
at this point we do not yet know whether they are dead or
transient.
Step 2: Random Walks While the exhaustive search is
essential to finding a candidate set of liveness violations, to
prune the false positives, we must distinguish the dead from
the transient states. To do so, we perform long random walks
to give the system sufficient time to enter a live state. If the
system still fails to reach a live state by the end of the walk,
we flag the execution as a suspected liveness violation.
Our random walks typically span tens or hundreds of
thousands of transitions to minimize the likelihood of false
positives.
Step 3: Isolating the Critical Transition The model checker
presents the execution exhibiting a suspected liveness
violation to the developer to assist in locating the actual error.
The programmer cannot understand the bug simply by
examining the first states that are not live, as these are almost
always transient states, i.e., there exist executions that would
transition these initial indeterminate states to live states. Thus,
we developed an algorithm to automatically isolate the critical
transition that irreversibly moves the system from a transient
state to a dead state.
3.1 Finding Violating Executions
We now describe the details of our algorithms. Suppose that
MaceMC is given a system, a safety property always ps, and
a liveness property eventually pl.
| Algorithm 1: | MaceMC_Search |
Input: Depth increment
depth = 0
repeat
if Sequences(depth) is empty then
depth = depth + increment
Reset system
seq = next sequence in Sequences(depth)
MaceMC_Simulator(seq)
until Stopping Condition
|
Our algorithm MaceMC_Search (Algorithm 1)
systematically explores the space of possible executions. Each
execution is characterized by the sequence of choices
made to determine the node-event pair to be executed at
each step. We iterate over all the sequences of choices
of some fixed length and explore the states visited in
the execution resulting from the sequence of choices.
Consider the set of all executions bounded to a given
depth depth. These executions form a tree by branching
whenever one execution makes a different choice from
another. To determine the order of executions, we simply
perform a depth-first traversal over the tree formed by
this depth bound. Sequences(depth) returns a sequence
of integers indicating which child to follow in the tree
during the execution. It starts by returning a sequence of
0’s, and each time it is called it increases the sequence,
searching all possible sequences. For each sequence,
MaceMC_Search initializes the system by resetting the values
of all nodes’ variables to their initial values and then calls
the procedure MaceMC_Simulator to explore the states
visited along the execution corresponding to the sequence.
After searching all sequences of length depth, we repeat
with sequences of increasing depth. We cannot search
extreme system depths due to the exponential growth
in state space. While they have not been necessary to
date, optimizations such as multiple random walks or
best-first search may enhance coverage over initial system
states.
| Algorithm 2: | MaceMC_Simulator |
Input: Sequence seq of integers
for i = 0 to dmax do
readyEvents = set of pending ⟨node,event⟩ pairs
eventnum = Toss(i,seq,|readyEvents|)
⟨node,event⟩ = readyEvents[eventnum]
Simulate event on node
if ps is violated then
signal Safety Violation
if i > depth and pl is satisfied then
return
signal Suspected Liveness Violation
|
Algorithm 2, MaceMC_Simulator, takes a sequence of
integers as input and simulates the resulting execution using
the sequence of choices corresponding to the integers.
MaceMC_Simulator simulates an execution of up to dmax
transitions (cf. §4.4 for setting dmax). At the ith step,
MaceMC_Simulator calls the procedure Toss with i, the
sequence, and the number of ready events to determine
pending node event pairs to execute, and then executes the
handler for the chosen event on the chosen node to obtain
the state reached after i transitions. If this state violates
the given safety predicate, then MaceMC_Simulator
reports the safety violation. If this state is beyond the
search depth and satisfies the given liveness predicate,
then the execution has not violated the liveness property
and the algorithm returns. Only considering liveness
for states beyond the search depth is important because
otherwise a live state within the periphery would prevent
us from finding liveness bugs that enter the dead state
beyond the periphery. If the loop terminates after dmax
steps, then we return the execution as a suspected liveness
violation.
Combining Exhaustive Search and Random Walks
The procedure Toss ensures that MaceMC_Search and
MaceMC_Simulator together have the effect of exhaustively
searching all executions of bounded depths and then
performing random walks from the periphery of the states
reached in the exhaustive search. Toss(i,seq,k) returns the
ith element of the sequence seq if i is less than |seq| (the
length of the sequence) or some random number between
0 and k otherwise. Thus, for the first |seq| iterations,
MaceMC_Simulator selects the seq[i]th element of the set
of pending node event pairs, thereby ensuring that we
exhaustively search the space of all executions of depth |seq|.
Upon reaching the end of the supplied sequence, the execution
corresponds to a random walk of length dmax -|seq|
performed from the periphery of the exhaustive search. By
ensuring dmax is large enough (hundreds of thousands of
transitions), we can give the system enough opportunity to
reach a live state. If the execution never enters a live state
despite this opportunity, we flag the execution as a suspected
liveness violation.
3.2 Finding the Critical Transition
If MaceMC reaches the maximum random walk depth dmax
without entering a live state, we have a suspected liveness
violation. The execution meets one of two conditions:
-
-
-
-
Condition 1 (C1): The execution is a DS liveness
violation, meaning the system will never recover. The
execution should be brought to the attention of the
programmer to locate and fix the error.
-
-
Condition 2 (C2): The execution does not reach any
live states, but might still in the future. The execution
should be brought to the attention of the programmer to
determine whether to proceed by increasing dmax or by
inspecting the execution for a bug.
Before discussing how we distinguish between the two cases,
consider an execution that does enter a dead state (meets
condition C1). The programmer now faces the daunting and
time consuming task of wading through tens of thousands of
events to isolate the protocol or implementation error that
transitioned the system to a dead state. Recall that while the
system may enter a transient state early, typically a much later
critical transition finally pushes the system into a dead
state. After attempting to find liveness errors manually
when only the violating execution was available, we set
out to develop an algorithm to automatically locate the
critical transition. Importantly, this same procedure also
heuristically identifies whether an execution meets C1 or
C2.
| Algorithm 3: | FindCriticalTransition |
Input: Execution E non-live from step dinit to dmax
Input: Number of Random Walks k
Output: (Critical Transition dcrit, Condition C1 or C2)
1: {Phase 1: Exponential Search}
2: if not Recovers(E,dinit, k) then return (dinit,C2)
3: dcurr = dinit
4: repeat
5: dprev = dcurr
6: dcurr = 2 × dcurr
7: if dcurr > dmax∕2 then return (dcurr,C2)
8: until not Recovers(E,dcurr, k)
9: {Phase 2: Binary Search}
10: {dprev is highest known recoverable}
11: {dcurr is lowest believed irrecoverable}
12: loop
13: if (dprev = dcurr - 1) then return (dcurr,C1)
14: dmid = (dprev + dcurr)∕2
15: if Recovers(E,dmid, k) then dprev = dmid
16: else dcurr = dmid
|
Algorithm 3 shows our two-phase method for locating the
critical transition. It takes as input the execution E from the
initial random walk, which from step dinit onwards never
reached a live state even after executing to the maximum
depth dmax. The function Recovers(E, i, k) performs up to k
random walks starting from the ith state on the execution E to
the depth dmax and returns TRUE if any of these walks hit a
live state, indicating that the ith state should be marked
transient; and FALSE otherwise, indicating that the ith state is
dead. In the first phase, MaceMC doubles dcurr until
Recovers indicates that dcurr is dead. dmax and the resulting
dcurr place an upper bound on the critical transition, and the
known live state dprev serves as a lower bound. In the
second phase, MaceMC performs a binary search using
Recovers to find the critical transition as the first dead state
dcrit between dprev and dcurr. If we perform k random
walks from each state along the execution, then the above
procedure takes O(k ⋅ dmax ⋅ log dcrit) time (Note that
dcrit ≤ dmax).
In addition to the full execution that left the system in a
dead state and the critical transition dcrit, we also present to
the programmer the event sequence that shares the longest
common prefix with the DS liveness violation that ended in a
live state. In our experience, the combination of knowing the
critical transition and comparing it to a similar execution
that achieves liveness is invaluable in finding the actual
error.
Two interesting corner cases arise in the FindCriticalTransition
algorithm. The first case occurs when Phase 1 cannot locate a
dead state (indicated by dcurr > dmax∕2 in line 7). In this
case, we conclude that as the critical transition does not
appear early enough, the system was not given enough
opportunity to recover during the random walk. Thus, case C2
holds. The developer should raise dmax and repeat. If raising
dmax does not resolve the problem, the developer should
consider the possibility that this execution is a TS liveness
violation. To help this analysis, MaceMC provides the set of
live executions similar to the violating execution, but the
developer must isolate the problem. In the second case, we
find no live executions even when in the initial state (line 2);
either the critical transition is at dinit (the initial state),
or, more likely, we did not set dmax high enough. The
programmer can typically determine with ease whether the
system condition at dinit contains a bug. If not, once again we
conclude that case C2 holds and raise dmax and repeat
Algorithm 1.
4 Implementation Details
This section describes several subtle details in our MaceMC
implementation. While we believe the techniques described in
Section 3 could be applied to any state-exploration model checker capable of replaying executions, MaceMC operates
on systems implemented using the Mace compiler and C++
language extensions [18]. Mace introduces syntax
to structure each node as a state machine with atomic
handlers corresponding to events such as message reception,
timers firing, etc. Mace implementations consist of C++
code in appropriately identified code blocks describing
system state variables and event handler methods; and the
Mace compiler outputs C++ code ready to run across the
Internet by generating classes and methods to handle
event dispatch, serialization, timers, callbacks, etc. Mace
implementations perform comparably or better than
hand-tuned implementations. Leveraging Mace code frees
us from the laborious task of modifying source code to
isolate the execution of the system, e.g., to control network
communication events, time, and other sources of potential
input. Thus, using Mace-implemented systems dramatically
improves the accessibility of model checking to the typical
programmer.
4.1 Preparing the System
To model check a system, the user writes a driver application
suitable for model checking that should initialize the system,
perform desired system input events, and check high-level
system progress with liveness properties. For example, to look
for bugs in a file distribution protocol, the test driver could
have one node supply the file, and the remaining nodes
request the file. The liveness property would then require that
all nodes have received the file and the file contents match. Or
for a consensus protocol, a simulated driver could propose a
different value from each node, and the liveness property
would be that each node eventually chooses a value and that
all chosen values match. The MaceMC application links with
the simulated driver, the user’s compiled Mace object files,
and Mace libraries. MaceMC simulates a distributed
environment to execute the system—loading different
simulator-specific libraries for random number generation,
timer scheduling, and message transport—to explore a variety
of event orderings for a particular system state and input
condition.
Non-determinism To exhaustively and correctly explore
different event orderings of the system, we must ensure that
the model checker controls all sources of non-determinism. So
far, we have assumed that the scheduling of pending
⟨node, event⟩ pairs accounts for all non-determinism, but real
systems often exhibit non-determinism within the event
handlers themselves, due to, e.g., randomized algorithms and
comparing timestamps. When being model checked, Mace
systems automatically use the deterministic simulated random
number generator provided by MaceMC and the support for
simulated time, which we discuss below. Furthermore, we
use special implementations of the Mace libraries that
internally call Toss at every non-deterministic choice point.
For example, the TCP transport service uses Toss to
decide whether to break a socket connection, the UDP
transport service uses Toss to determine which message
to deliver (allowing out-of-order messages) and when
to drop messages, and the application simulator uses
Toss to determine whether to reset a node. Thus, by
systematically exploring the sequences of return values of
Toss (as described in MaceMC_Search in the previous
section), MaceMC analyzes all different sequences of
internal non-deterministic choices. Additionally, this allows
MaceMC to deterministically replay executions for a given
sequence of choices.
Time Time introduces non-determinism, resulting in
executions that may not be replayable or, worse, impossible
in practice. For example, a system may branch based
on the relative value of timestamps (e.g., for message
timeout). But if the model checker were to use actual
values of time returned by gettimeofday(), this
comparison might always be forced along one branch as
the simulator fires events faster than a live execution.
Thus, MaceMC must represent time abstractly enough to
permit exhaustive exploration, yet concretely enough to
only explore feasible executions. In addition, MaceMC
requires that executions be deterministically replayable
by supplying an identical sequence of chosen numbers
for all non-deterministic operations, including calls to
gettimeofday.
We observed that systems tend to use time to: (i) manage
the passage of real time, e.g., to compare two timestamps
when deciding whether a timeout should occur, or,
(ii) export the equivalent of monotonically increasing
sequence numbers, e.g., to uniquely order a single
node’s messages. Therefore, we address the problem of
managing time by introducing two new Mace object
primitives—MaceTime and MonotoneTime—to obtain
and compare time values. When running across a real
network, both objects are wrappers around gettimeofday.
However, MaceMC treats every comparison between
MaceTime objects as a call to Toss and implements
MonotoneTime objects with counters. Developers
concerned with negative clock adjustments (and more
generally non-monotone MonotoneTime implementations)
can strictly use MaceTime to avoid missing bugs, at
the cost of extra states to explore. Compared to state of
the art model checkers, this approach frees developers
from manually replacing time-based non-determinism
with calls to Toss, while limiting the amount of needless
non-determinism.
4.2 Mitigating State Explosion
One stumbling block for model-checking systems is the
exponential explosion of the state space as the search depth
increases. MaceMC mitigates this problem using four
techniques to find bugs deep in the search space.
1. Structured Transitions The event-driven, non-blocking
nature of Mace code significantly simplifies the task of
model-checking Mace implementations and improves its
effectiveness. In the worst case, a model checker would have
to check all possible orderings of the assembler instructions
across nodes with pending events, which would make it
impractical to explore more than a few hundred lines of
code across a small number of nodes. Model checkers
must develop techniques for identifying larger atomic
steps. Some use manual marking, while others interpose
communication primitives. Non-blocking, atomic event
handlers in Mace allow us to use event-handler code blocks
as the fundamental unit of execution. Once a given code
block runs to completion, we return control to MaceMC.
At this point, MaceMC checks for violations of any
safety or liveness conditions based on global system
state.
2. State Hashing When the code associated with a particular
event handler completes without a violation, MaceMC
calculates a hash of the resulting system state. This state
consists of the concatenation of the values of all per-node state
variables and the contents of all pending, system-wide events.
The programmer may optionally annotate Mace code to
ignore the value of state variables believed to not contribute
meaningfully to the uniqueness of global system state, or to
format the string representation into a canonical form to
avoid unneeded state explosion (such as the order of
elements in a set). MaceMC_Simulator checks the hash of a
newly-entered state against all previous state hashes. When it
finds a duplicate hash, MaceMC breaks out of the current
execution and begins the next sequence. In our experience,
this allows MaceMC to avoid long random walks for
50-90 percent of all executions, yielding speedups of
2-10.
3. Stateless Search MaceMC performs backtracking by
re-executing the system with the sequence of choices used to
reach an earlier state, similar to the approach taken by
Verisoft [11]. For example, to backtrack from the system
state characterized by the sequence ⟨0,4,0⟩ to a subsequent
system state characterized by choosing the sequence
⟨0,4,1⟩, MaceMC reruns the system from its initial state,
re-executing the event handlers that correspond to choosing
events 0 and 4 before moving to a different portion of the
state space by choosing the event associated with value
1. This approach is simple to implement and does not
require storing all of the necessary state (stack, heap,
registers) to restore the program to an intermediate state.
However, it incurs additional CPU overhead to re-execute
system states previously explored. We have found trading
additional CPU for memory in this manner to be reasonable
because CPU time has not proven to be a limitation in
isolating bugs for MaceMC. However, the stateless
approach is not fundamental to MaceMC—we are presently
exploring hybrid approaches that involve storing some state
such as sequences for best-first searching or state for
checkpointing and restoring system states to save CPU
time.
4. Prefix-based Search Searching from an initial global state
suffers the drawback of not reaching significantly past
initialization for the distributed systems we consider.
Further, failures during the initial join phase do not have the
opportunity to exercise code paths dealing with failures in
normal operation because they simply look like an aborted
join attempt (e.g., resulting from dropped messages) followed
by a retry. To find violations in steady-state system operation,
we run MaceMC to output a number of live executions of
sufficient length, i.e., executions where all liveness conditions
have been satisfied, all nodes have joined, and the system has
entered steady-state operation. We then proceed as normal
from one of these live prefixes with exhaustive searches for
safety violations followed by random walks from the
perimeter to isolate and verify liveness violations. We found
the Pastry bug described in the introduction using a
prefix-based search.
4.3 Biasing Random Walks
We found that choosing among the set of all possible actions
with equal probability had two undesirable consequences.
First, the returned error paths had unlikely event sequences
that obfuscated the real cause of the violation. For example,
the system generated a sequence where the same timer fired
seven times in a row with no intervening events, which would
be unlikely in reality. Second, these unlikely sequences
slowed system progress, requiring longer random walks to
reach a live state. Setting dmax large enough to ensure
that we had allowed enough time to reach live states
slowed FindCriticalTransition by at least a factor of
ten.
We therefore modified Toss to take a set of weights
corresponding to the rough likelihood of each event occurring
in practice. Toss returns an event chosen randomly with
the corresponding probabilities. For example, we may
prioritize application events higher than message arrivals,
and message arrivals higher than timers firing. In this
way, we bias the system to search event sequences in
the random walk with the hope of reaching a live state
sooner, if possible, and making the error paths easier to
understand.
Biasing the random walks to common sequences may runcounter to the intuition that model checkers should push the
system into corner conditions difficult to predict or reason
about. However, recall that we run random walks only after
performing exhaustive searches to a certain depth. Thus, the
states reached by the periphery of the exhaustive search
encompass many of these tricky corner cases, and the system
has already started on a path leading to—or has even
entered—a dead state.
One downside to this approach is that the programmer must
set the relative weights for different types of events. In our
experience, however, every event has had a straightforward
rough relative probability weighting. Further, the reductions in
average depth before transitioning to a live state and the ease
of understanding the violating executions returned by
MaceMC have been worthwhile. If setting the weights
proves challenging for a particular system, MaceMC can be
run with unbiased random walks.
4.4 Tuning MaceMC
In addition to event weights discussed above, MaceMC
may be tuned by setting dmax (random walk depth), k
(number of random walks), and a wide variety of knobs
turning features on and off. Feature knobs include whether
to test node failures, socket failures, UDP drops, UDP
reordering, and the number of simulated nodes, and are
generally easy to set based on the target test environment.
Setting k is a bit more complex. k represents the tradeoff
between the time to complete the critical transition algorithm
and the possibility that the reported critical transition is before
the actual critical transition. This occurs when k random
executions of dmax steps did not satisfy liveness, but some
other path could have. We informally refer to this occurrence
as “near dead”. In our tests, we general use k between 20
and 60. At 60, we have not observed any prematurely
reported critical transitions, while at 20 we occasionally
observe the reported critical transition off by up to 2 steps.
To tune k, the programmer considers the output critical
transition. If it is not obvious why it is the critical transition,
the programmer can increase k and re-run to refine the
results.
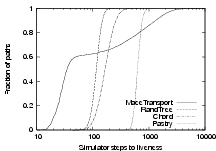
Finally, we discuss how to set dmax. We ran MaceMC
over four systems using random walks to sample the state
space beyond an exhaustive search to 15 steps. Figure 2 plots
the fraction of executions that reached the first live state
at a given depth. What we observe is that in these four
systems, since all sample executions reached a live state
by 10,000 steps, a random execution that takes 80,000
steps to reach a live state would be a significant outlier,
and likely somewhere along the execution it became
trapped in a region of dead states. Setting dmax too low
generally leads to the critical transition algorithm reporting
condition C2, which is what we treat as the signal to increase
dmax.
Figure 2 also illustrates that the depths required to initially
reach a live state are much greater than what can be found
with exhaustive search. MaceMC found only 60% of
executions reached a live state for MaceTransport after
considering 50 steps (the edge of what can be exhaustively
searched using state-of-the-art model checkers), less than 1%
of executions for RandTree and Chord, and none of the
executions for Pastry.
5 MaceMC Debugger
Although MaceMC flags violating executions and identifies
the critical transition that likely led the system to a dead state,
the developer must still understand the sequence of events to
determine the root cause of the error. This process typically
involves manually inspecting the log files and hand-drawing
sketches of evolving system state. To simplify this process, we
built Mdb, our debugging tool with support for interactive execution, replay, log analysis, and visualization of system
state across individual nodes and transitions. Mdb is similar
in function to other work in distributed debuggers such
as the WiDS Checker [22] and Friday [10]. Mdb
allows the programmer to: (i) perform single step system
execution both forward and backward, (ii) jump to a
particular step, (iii) branch execution from a step to explore a
different path, (iv) run to liveness, (v) select a specific
node and step through events only for that node, (vi)
list all the steps where a particular event occurred, (vii)
filter the log using regular expressions, and (viii) diff the
states between two steps or the same step across different
executions by comparing against a second, similar log
file.
Mdb also generates event graphs that depict inter-node
communication. It orders the graph by nodes on the x-axis and
simulator steps on the y-axis. Each entry in the graph
describes a simulated event, including the transition call stack
and all message fields. Directional arrows represent message
transmissions, and other visual cues highlight dropped
messages, node failures, etc.
_________________________________________________________________________________________
$ ./mdb error.log
(mdb 0) j 5
(mdb 5) filediff live.log
…
localaddress=2.0.0.1:10201
out=[
- OutgoingConnection(1.0.0.1:10201, connection=ConnectionInfo(cwnd=2, packetsSent=2, acksReceived=1, packetsRetransmitted=0),
- inflight=[ 6002 → MessageInfo(seq=6002, syn=0, retries=0, timeout=true) ],
- rtbuf=[ ], sendbuf=[ ], curseq=6002, dupacks=0, last=6001)
+ OutgoingConnection(1.0.0.1:10201, connection=ConnectionInfo(cwnd=1, packetsSent=1, acksReceived=0, packetsRetransmitted=0),
+ inflight=[ 6001 → MessageInfo(seq=6001, syn=1, retries=0, timeout=true) ],
+ rtbuf=[ ], sendbuf=[ MessageInfo(seq=6002, syn=0, timer=0, retries=0, timeout=true) ], curseq=6002, dupacks=0, last=0)
]
in=[ ]
-timer<retransmissionTimer>([dest=1.0.0.1:10201, msg=MessageInfo(seq=6002, syn=0, retries=0, timeout=true)])
+timer<retransmissionTimer>([dest=1.0.0.1:10201, msg=MessageInfo(seq=6001, syn=1, retries=0, timeout=true)])
…___________________________________________________________________________________________________________________________________________
| Figure 3: | Mdb session. Lines with differences are shown in italics (- indicates the error log, + the live log), with differing text
shown in bold. The receiver is IP address 1.0.0.1 and the sender is 2.0.0.1. |
|
Mdb recreates the system state by analyzing detailed
log files produced by MaceMC. While searching for
violations, MaceMC runs with all system logging disabled
for maximum efficiency. Upon discovering a violation,
MaceMC automatically replays the path with full logging.
The resulting log consists of annotations: (i) written by the
programmer, (ii) generated automatically by the Mace
compiler marking the beginning and end of each transition,
(iii) produced by the simulator runtime libraries, such as timer
scheduling and message queuing and delivery, and (iv)
generated by the simulator to track the progress of the run,
including random number requests and results, the node
simulated at each step, and the state of the entire system after
each step. For our runs, logs can span millions of entries
(hundreds to thousands of megabytes).
To demonstrate the utility of our debugging tools for
diagnosing and fixing errors, we consider a case study
with a bug in MaceTransport: a reliable, in-order,
message delivery transport with duplicate-suppression and
TCP-friendly congestion-control built over UDP. Unlike TCP,
MaceTransport is fundamentally message- rather than
stream-oriented, making it a better match for certain
higher-level application semantics. As such, rather than using
sequence numbers to denote byte offsets as with TCP,
MaceTransport assigns an incrementing sequence number
to each packet. To obtain lower-latency communication,
MaceTransport avoids a three-way handshake to
establish initial sequence numbers. A key high-level liveness
property for MaceTransport is that eventually every
message should be acknowledged (unless the connection
closes).
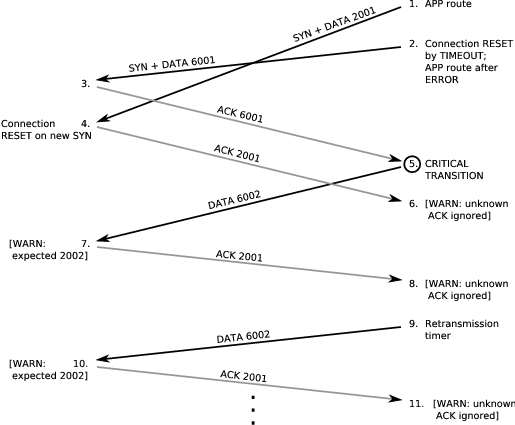
MaceMC found a violating execution of the “AllAcked”
property in Table 1, where a sender attempts to send two
messages to a receiver. Figure 4 shows a pictorial version of
the event graphs automatically generated by Mdb; the actual
event graph is text-based for convenience and contains more
detail. In Step 1, the sender sends a data packet with the
SYN flag set and sequence number 2001. In Step 2, the
retransmission timer causes the connection to close and
MaceTransport signals an error to the application. The
application responds by attempting to resend the packet,
causing MaceTransport to open a new connection
with sequence number 6001. At this point, both the old
“SYN 2001” and the new “SYN 6001” packets are in flight.
In Step 3, the network delivers the packet for the new
6001 connection, and the receiver replies by sending an
“ACK 6001” message. In Step 4, the network delivers the
out-of-order “SYN 2001” message, and the receiver
responds by closing the connection on 6001, thinking it
is stale, and opening a new incoming connection for
2001.
Unfortunately, in Step 5 (the critical transition)
the sender receives the “ACK 6001.” Believing the 6000-sequence connection to be established, the sender
transmits “DATA 6002,” at odds with the receiver’s view.
From here on, the execution states are dead as the receiver
keeps ignoring the “DATA 6002” packet, sending ACKs for
the 2001 connection instead, while the sender continues to
retransmit the “DATA 6002” packet, believing it to be the
sequence number for the established connection.
We illustrate a portion of an Mdb session analyzing this
bug in Figure 3. We load the error log in Mdb, jump to the
critical transition step (5), and diff the state with the live path
with the longest shared prefix (output by MaceMC while
searching for the critical transition (see §3.2)). The excerpt
shows the state for the sender node. The key insight from this
output is that in the live execution (lines indicated with +), the
retransmission timer is scheduled with “SYN 6001,”
meaning that the packet could be retransmitted and the
receiver could become resynchronized with the sender.
Comparing the differences with the violating execution (lines
indicated with -), where 6001 has been removed from the
inflight map and timer because of the ACK, allows us to
identify and fix the bug by attaching a monotonically
increasing identifier in the SYN packets, implemented using a
MonotoneTime object. Now, when the receiver gets the
“SYN 2001” message out of order, it correctly concludes
from the identifier that the message is stale and should be
ignored, allowing acknowledgment of the “DATA 6002”
message.
6 Experiences
We have used MaceMC to find safety and liveness bugs in a
variety of systems implemented in Mace, including a reliable
transport protocol, an overlay tree, Pastry, and Chord.
With the exception of Chord, we ran MaceMC over mature
implementations manually debugged both in local- and
wide-area settings. MaceMC found several subtle bugs in
each system that caused violations of high-level liveness
properties. All violations (save some found in Chord, see
below) were beyond the scope of existing software model
checkers because the errors manifested themselves at depths
far beyond what can be exhaustively searched. We used the
debugging process with Chord as control—we first
performed manual debugging of a new implementation
of Chord and then employed MaceMC to compare
the set of bugs found through manual and automated
debugging.
Table 2 summarizes the bugs found with MaceMC to
date. This includes 52 bugs found in four systems. Spanning
the three mature systems, the 33 bugs across 1500 lines of
Mace code correspond to one bug for every 50 lines of
code. MaceMC actually checks the generated C++ code,
corresponding to one bug for every 250 lines of code. In the
only comparable check of a complex distributed system, CMC
found approximately one bug for every 300 lines of code
in three versions of the AODV routing protocol [25].
Interestingly, more than 50% of the bugs found by CMC
were memory handling errors (22/40 according to Table
4 [25]) and all were safety violations. The fact that
MaceMC finds nearly the same rate of errors while
focusing on an entirely different class of liveness errors
demonstrates the complementary nature of the bugs found by
checking for liveness rather than safety violations. To
demonstrate the nature and complexity of liveness violations
we detail two representative violations below; we leave a
detailed discussion of each bug we found to a technical
report [17].
Typical MaceMC run times in our tests have been from
less than a second to a few days. The median time for
the search algorithm has been about 5 minutes. Typical
critical-transition algorithm runtimes are from 1 minute to 3
hours, with the median time being about 9 minutes.
|
|
|
|
|
|
|
|
|
| | System | Bugs | Liveness | Safety | LOC |
|
|
|
|
|
|
|
|
|
| | MaceTransport | 11 | 5 | 6 | 585/3200 |
| RandTree | 17 | 12 | 5 | 309/2000 |
| Pastry | 5 | 5 | 0 | 621/3300 |
| Chord | 19 | 9 | 10 | 254/2200 |
|
|
|
|
|
|
|
|
|
| | Totals | 52 | 31 | 21 | |
|
|
|
|
|
|
|
|
|
| | |
| Table 2: | Summary of bugs found for each system. LOC=Lines
of code and reflects both the Mace code size and the generated
C++ code size. |
|
RandTree implements a random overlay tree with a
maximum degree designed to be resilient to node failures and
network partitions. This tree forms the backbone for a number
of higher-level aggregation and gossip services including our
implementations of Bullet [21] and RanSub [20]. We have
run RandTree across emulated and real wide-area networks
for three years, working out most of the initial protocol
errors.
RandTree nodes send a “Join” message to a bootstrap
node, who in turn forwards the request up the tree to the root.
Each node then forwards the request randomly down the tree
to find a node with available capacity to take on a new
child. The new parent adds the requesting node to its
child set and opens a TCP connection to the child. A
“JoinReply” message from parent to child confirms the new
relationship.
Property. A critical high-level liveness property for
RandTree (and other overlay tree implementations) is that
all nodes should eventually become part of a single spanning
tree.
We use four separate Mace liveness properties to capture
this intuition: (i) there are no loops when following parent
pointers, (ii) a node is either the root or has a parent, (iii) there
is only one root (shown in Table 1), and (iv) each node N’s
parent maintains it as a child, and N’s children believe N to
be their parent.
Violation. MaceMC found a liveness violation where two
nodes A,D have a node C in their child set, even though C’s
parent pointer refers to D. Along the violating execution, C
initially tries to join the tree under B, which forwards
the request to A. A accepts C as a child and sends it a
“JoinReply” message. Before establishing the connection, C
experiences a node reset, losing all state. A, however, now
establishes the prior connection with the new C, which
receives the “JoinReply’ and ignores it (having been
reinitialized). Node C then attempts to join the tree but this
time is routed to D, who accepts C as a child. Node A
assumes that if the TCP socket to C does not break, the child
has received the “JoinReply” message and therefore does not
perform any recovery. Thus, C forever remains in the child
sets of A and D.
Bug. The critical transition for this execution is the step
where C receives the “JoinReply” from A. Mdb reveals
that upon receiving the message, C ignores the message
completely, without sending a “Remove” message to A.
Along the longest live alternate path found from the state
prior to the critical transition, we find that instead of
receiving A’s join reply message, C gets a request from
the higher-level application asking it to join the overlay
network, which causes C to transition into a “joining” mode
from its previous “init” mode. In this alternate path, C
subsequently receives A’s “JoinReply” message, and correctlyhandles it by sending A a “Remove” message. Thus, we
deduced that the bug was in C’s ignoring of “JoinReply”
messages when in the “init” mode. We fix the problem by
ensuring that a “Remove” reply is sent in this mode as
well.
Chord specifies a key-based routing protocol [30].
Chord structures an overlay in a ring such that nodes have
pointers to their successor and predecessor in the key-space.
To join the overlay a new node gets its predecessor and
successor from another node. A node inserts itself in the ring
by telling its successor to update its predecessor pointer,
and a stabilize procedure ensures global successor and
predecessor pointers are correct through each node probing its
successor.
Property. We use a liveness property to specify that all nodes
should eventually become part of a single ring (see Table 1).
This minimal correctness condition guarantees that routing
reach the correct node.
Violation. MaceMC found a liveness violation in the very
first path it considered. This was not unexpected, given that
Chord had not been tested yet. However, the critical
transition algorithm returned transition 0 and condition C2,
implying that the algorithm could not determine if the path
had run long enough to reach liveness.
Looking at the event graph, we saw the nodes finished their
initial join quickly (step 11), and spent the remaining steps
performing periodic recovery. This process suggested that the
system as a whole was dead, since reaching a live state would
probably not require tens of thousands of transitions when the
initial join took only 11.
Mdb showed us that mid-way through the execution,
client0’s successor pointer was client0 (implying that it
believed it was in a ring of size 1), which caused the
liveness predicate to fail. The other nodes’ successor
pointers correctly followed from client1 to client2 to client0.
We believed the stabilize procedure should correct this
situation, expecting client2 to discover that client0 (its
successor) was in a self-loop and correct the situation.
Looking at this procedure in the event graph, we saw
that there was indeed a probe from client2 to client0.
However, client2 ignored the response to this probe. We next
jumped to the transition in Mdb corresponding to the probe
response from the event graph. In fact, client0 reported that
client2 was its predecessor, so client2 did not correct the
error.
Starting at the initial state in Mdb we stepped through
client0’s transitions, checking its state after each step to see
when the error symptom occurs. After 5 steps, client0 receives
a message that causes it to update its predecessor but not its
successor, thus causing the bug.
Bug. This problem arose because we based our original
implementation of Chord on the original protocol [30],
where a joining node explicitly notified its predecessor that it
had joined. We then updated our implementation to the
revised protocol [31], which eliminated this notification and
specified that all routing state should be updated upon
learning of a new node. However, while we removed the join
notification in our revisions, we failed to implement the new
requirements for updating routing state, which we overlooked
because it concerned a seemingly unrelated piece of code. We
fixed the bug by correctly implementing the new protocol
description.
Overall, both our manual testing and model checking
approaches found slightly different sets of bugs. On the one
hand, manual testing found many of the correctness bugs and
also fixed several performance issues (which cannot be found
using MaceMC). Manual testing required that we spend at
least half of our time trying to determine whether or not an
error even occurred. A single application failure may have
been caused by an artifact of the experiment, or simply the
fact that the liveness properties had not yet been satisfied.
Because of these complexities, identifying errors by hand
took anywhere from 30 minutes to several hours per
bug.
On the other hand, MaceMC did find some additional
correctness bugs and moreover required less human time to
locate the errors. MaceMC examines the state-snapshot across
all nodes after each atomic event and reports only known
bugs, thereby eliminating the guesswork of determining
whether an error actually occurred. Furthermore, the model
checker outputs which property failed and exactly how to
reproduce the circumstances of the failure. MaceMC also
produces a verbose log and event graph, and in the case of
liveness violations, an alternate path which would have been
successful. These features make it much easier to verify and
identify bugs using MaceMC, without the hassle of
conducting experiments that require running many hosts on a
network. We spent only 10 minutes to an hour using
MaceMC to find the same bugs that we painstakingly
identified earlier with manual testing; and we found the new
bugs (those not caught with manual testing) in only tens of
minutes.
7 Related Work
Our work is related to several techniques for finding errors in
software systems that fall under the broad umbrella of Model
Checking.
Classical Model Checking. “Model Checking,” i.e., checking
a system described as a graph (or a Kripke structure)
was a model of a temporal logic formula independently
invented in [6, 27]. Advances like Symmetry Reduction,
Partial-Order Reduction, and Symbolic Model Checking
have enabled the practical analysis of hardware circuits
[23, 2], cache-coherence and cryptographic protocols [9],
and distributed systems and communications protocols
[15], which introduced the idea of state-hashing used by MaceMC. However, the tools described above require the
analyzed software to be specified in a tool-specific language,
using the state graph of the system constructed either before
or during the analysis. Thus, while they are excellent for
quickly finding specification errors early in the design
cycle, it is difficult to use them to verify the systems
implementations. MaceMC by contrast tests the C++
implementation directly, finding bugs both in the design and
the implementation.
Model Checking by Random Walks. West [32] proposed
the idea of using random walks to analyze networking
protocols whose state spaces were too large for exhaustive
search. Sivaraj and Gopalakrishnan [29] propose a method
for iterating exhaustive search and random walks to find bugs
in cache-coherence protocols. Both of the above were applied
to check safety properties in systems described using
specialized languages yielding finite state systems. In contrast,
MaceMC uses random walks to find liveness bugs by
classifying states as dead or transient, and further, to pinpoint
the critical transition.
Model Checking by Systematic Execution. Two model
checkers that directly analyze implementations written in C
and C++ are Verisoft [11] and CMC [25]. Verisoft
views the entire system as several processes communicating
through message queues, semaphores and shared variables
visible to Verisoft. It schedules these processes and traps
calls that access shared resources. By choosing the process to
execute at each such trap point, the scheduler can exhaustively
explore all possible interleavings of the processes’ executions.
In addition, it performs stateless search and partial order
reduction allowing it to find critical errors in a variety of
complex programs. Unfortunately, when we used Verisoft
to model-check Mace services, it was unable to exploit the
atomicity of Mace’s transitions, and this combined with the
stateless search meant that it was unable to exhaustively
search to the depths required to find the bugs MaceMC
found.
A more recent approach, CMC [25], also directly
executes the code and explores different executions by
interposing at the scheduler level. CMC has found errors in
implementations of network protocols [24] and file
systems [34]. JavaPathFinder [14] takes an approach
similar to CMC for Java programs. Unlike Verisoft,
CMC, and JavaPathFinder, MaceMC addresses
the challenges of finding liveness violations in systems
code and simplifying the task of isolating the cause of a
violation.
Model Checking by Abstraction. A different approach to
model checking software implementations is to first abstract
them to obtain a finite-state model of the program, which is
then explored exhaustively [16, 8, 4, 12, 3, 7] or up to
a bounded depth using a SAT-solver [5, 33]. Of the
above, only Feaver and Bandera can be used for
liveness-checking of concurrent programs, and they require a
user to manually specify how to abstract the program into a
finite-state model.
Isolating Causes from Violations. Naik et al. [26]
and Groce [13] propose ways to isolate the cause of a
safety violation by computing the difference between a
violating run and the closest non-violating one. MaceMC
instead uses a combination of random walks and binary
search to isolate the critical transition causing a liveness
violation, and then uses a live path with a common prefix to
help the programmer understand the root cause of the
bug.
8 Conclusions
The most insidious bugs in complex distributed systems are
those that occur after some unpredictable sequence of
asynchronous interactions and failures. Such bugs are
difficult to reproduce—let alone fix—and typically manifest
themselves as executions where the system is unable
to ever enter some desired state after an error occurs.
In other words, these bugs correspond to violations of
liveness properties that capture the designer’s intention of
how the system should behave in steady-state operation.
Though prior software model checkers have dramatically
improved our ability to find and eliminate errors, elusive
bugs like the subtle error we found in Pastry have been
beyond their reach, as they only find violations of safety
properties.
We have described techniques that enable software model
checkers to heuristically isolate the complex bugs that
cause liveness violations in systems implementations. A
key insight behind our work is that many interesting
liveness violations correspond to the system entering a
dead state, from which recovery to the desired state is
impossible. Though a safety property describing dead
states exists mathematically, it is often too complex and
implementation-specific for the programmer to specify
without knowing the exact bug in the first place. Thus, we
have found that the process of finding the errors that cause
liveness violations often reveals previously unknown safety
properties, which can be used to find and fix more errors. We
have used MaceMC to find 31 liveness (and 21 safety) errors
in Mace implementations of four complex distributed
systems. We believe that our techniques—a combination
of state-exploration, random walks, critical transition
identification, and Mdb—radically expand the scope of
implementation model checkers to include liveness violations,
thereby enabling programmers to isolate subtle errors in
systems implementations.
Acknowledgements
We would like to thank our shepherd, Petros Maniatis, for his
many insights and contributions to this paper, and our
anonymous reviewers, for their valuable comments.
References
[1] Freepastry: an open-source
implementation of pastry intended for deployment in the internet. http://freepastry.rice.edu, 2006.
[2] Alur, R., Henzinger, T., Mang, F., Qadeer, S.,
Rajamani, S., and Tasiran, S. Mocha: modularity in
model checking. In Computer-aided Verification (CAV), A. Hu
and M. Vardi, Eds., Lecture Notes in Computer Science 1427.
Springer-Verlag, 1998, pp. 521–525.
[3] Ball, T., and Rajamani, S. The SLAM project: debugging
system software via static analysis. In Principles of Programming
Languages (POPL) (2002).
[4] Chen, H., and Wagner, D. MOPS: an infrastructure for
examining security properties of software. In Computer and
Communications Security (CCS) (2002).
[5] Clarke, E., Kroening, D., and Lerda, F. A tool for
checking ANSI-C programs. In Tools and Algorithms for the
Construction and Analysis of Systems (TACAS) (2004), K. Jensen
and A. Podelski, Eds., vol. 2988 of Lecture Notes in Computer
Science, pp. 168–176.
[6] Clarke, E. M., and Emerson, E. A. Synthesis of
synchronization skeletons for branching time temporal logic. In
Logic of Programs (1981), Lecture Notes in Computer Science
131.
[7] Cook, B., Podelski, A., and Rybalchenko, A.
Termination proofs for systems code. In Programming Language
Design and Implementation (PLDI) (2006).
[8] Corbett, J., Dwyer, M., Hatcliff, J., Pasareanu, C.,
Robby, Laubach, S., and Zheng, H. Bandera : Extracting
finite-state models from Java source code. In International
Conference on Software Engineering (ICSE) (2000).
[9] Dill, D., Drexler, A., Hu, A., and Yang, C. H.
Protocol verification as a hardware design aid. In International
Conference on Computer Design (ICCD) (1992).
[10] Geels, D., Altekar, G., Maniatis, P., Roscoe, T., and
Stoica, I. Friday: Global comprehension for distributed replay.
In Networked Systems Design and Implementation (NSDI) (2007).
[11] Godefroid, P. Model checking for programming languages
using Verisoft. In Principles of Programming Languages (POPL)
(1997).
[12] Graf, S., and Saïdi, H. Construction of abstract state
graphs with PVS. In Computer-aided Verification (CAV), Lecture
Notes in Computer Science 1254. 1997, pp. 72–83.
[13] Groce, A., and Visser, W. What went wrong: Explaining
counterexamples. In Spin Model Checking and Software
Verification (SPIN) (2003).
[14] Havelund, K., and Pressburger, T. Model checking
Java programs using Java Pathfinder. Software Tools for
Technology Transfer (STTT) 2(4) (2000), 72–84.
[15] Holzmann, G. The Spin model checker. Transactions on
Software Engineering 23, 5 (1997), 279–295.
[16] Holzmann, G. Logic verification of ANSI-C code with
SPIN. In Spin Model Checking and Software Verification (SPIN)
(2000), Lecture Notes in Computer Science 1885.
[17] Killian, C., Anderson, J., Jhala, R., and Vahdat, A.
Life, death, and the critical transition: Finding liveness bugs in
systems code. Tech. rep., University of California, San Diego. http://mace.ucsd.edu/papers/MaceMC_TR.pdf.
[18] Killian, C., Anderson, J. W., Braud, R., Jhala,
R., and Vahdat, A. Mace: Language support for building
distributed systems. In Programming Languages Design and
Implementation (PLDI) (2007).
[19] Kindler, E. Safety and liveness properties: A survey.
EATCS-Bulletin, 53 (1994).
[20] Kostić, D., Rodriguez, A., Albrecht, J., Bhirud,
A., and Vahdat, A. Using Random Subsets to Build
Scalable Network Services. In USENIX Symposium on Internet
Technologies and Systems (USITS) (2003).
[21] Kostić, D., Rodriguez, A., Albrecht, J., and Vahdat,
A. Bullet: High bandwidth data dissemination using an overlay
mesh. In Symposium on Operating Systems Principles (SOSP)
(2003).
[22] Lui, X., Lin, W., Pan, A., and Zhang, Z. Wids checker:
Combating bugs in distributed systems. In Networked Systems
Design and Implementation (NSDI) (2007).
[23] McMillan, K. L. A methodology for hardware verification
using compositional model checking. Science of Computer
Programming 37, (1–3) (2000), 279–309.
[24] Musuvathi, M., and Engler, D. R. Model checking
large network protocol implementations. In Networked Systems
Design and Implementation (NSDI) (2004).
[25] Musuvathi, M., Park, D., Chou, A., Engler, D., and
Dill, D. CMC: A pragmatic approach to model checking real
code. In Operating Systems Design and Implementation (OSDI)
(2002).
[26] Naik, M., Ball, T., and Rajamani, S. From symptom to
cause: Localizing errors in counterexample traces. In Principles of
Programming Languages (POPL) (2003).
[27] Queille, J., and Sifakis, J. Specification and verification
of concurrent systems in CESAR. In International Symposium on
Programming, M. Dezani-Ciancaglini and U. Montanari, Eds.,
Lecture Notes in Computer Science 137. Springer-Verlag, 1981.
[28] Rowstron, A., and Druschel, P. Pastry: Scalable,
distributed object location and routing for large-scale peer-to-peer
systems. In Middleware (2001).
[29] Sivaraj, H., and Gopalakrishnan, G. Random
walk based heuristic algorithms for distributed memory model
checking. Electr. Notes Theor. Comput. Sci. 89, 1 (2003).
[30] Stoica, I., Morris, R., Karger, D., Kaashoek, F., and
Balakrishnan, H. Chord: A scalable peer to peer lookup
service for internet applications. In ACM Special Interest Group
on Data Communication (SIGCOMM) (2001).
[31] Stoica, I., Morris, R., Liben-Nowell, D., Karger,
D. R., Kaashoek, M. F., Dabek, F., and Balakrishnan,
H. Chord: a scalable peer-to-peer lookup protocol for internet
applications. Transactions on Networking 11, 1 (2003), 17–32.
[32] West, C. H. Protocol validation by random state exploration.
In 6th IFIP WG 6.1 International Workshop on Protocol
Specification, Testing, and Verification (1986).
[33] Xie, Y., and Aiken, A. Scalable error detection using
boolean satisfiability. In Principles of Programming Languages
(POPL) (2005).
[34] Yang, J., Twohey, P., Engler, D. R., and Musuvathi,
M. Using model checking to find serious file system errors. In
Operating Systems Design and Implementation (OSDI) (2004).
|