|
NSDI '04 Paper
[NSDI '04 Technical Program]
\Large
Contract-Based Load Management in Federated Distributed
Systems
Contract-Based Load Management in Federated Distributed
Systems1
Magdalena Balazinska, Hari Balakrishnan, and Mike Stonebraker
MIT Computer Science and Artificial Intelligence Lab
http://nms.lcs.mit.edu/projects/medusa/
Abstract
This paper focuses on load management in loosely-coupled federated
distributed systems. We present a distributed mechanism for moving
load between autonomous participants using bilateral contracts that
are negotiated offline and that set bounded prices for moving load.
We show that our
mechanism has good incentive properties, efficiently redistributes
excess load, and has a low overhead in practice.
Our load management mechanism is especially well-suited for
distributed stream-processing applications, an emerging class of
data-intensive applications that employ a "continuous query
processing" model. In this model, streams of data are processed and
composed continuously as they arrive rather than after they are
indexed and stored. We have implemented the mechanism in the
Medusa distributed stream processing system, and we demonstrate its
properties using simulations and experiments.
1 Introduction
Many distributed systems are composed of loosely coupled autonomous
nodes spread across different administrative domains. Examples of such
federated systems include Web services, cross-company workflows where
the end-to-end services require processing by different
organizations [3,21], and peer-to-peer
systems [8,23,30,45]. Other examples are
computational grids composed of computers situated in different
domains [4,16,44], overlay-based computing
platforms such as Planetlab [35], and data-intensive
stream processing
systems [1,2,5,6,7]
that can be distributed across different domains to provide data
management services for data streams.
Federated operation offers organizations the opportunity to pool their
resources together for common benefit. Participants can compose the
services they provide into more complete end-to-end services.
Organizations can also cope with load spikes without individually
having to maintain and administer the computing, network, and storage
resources required for peak operation.
Autonomous participants, however, do not collaborate for the benefit
of the whole system, but rather aim to maximize their own benefit. A
natural way to architect a federated system is thus as a
computational economy, where participants provide resources and
perform computing for each other in exchange for
payment.2
When autonomous participants are also real economic entities,
additional constraints come into play. The popularity of bilateral
agreements between Internet Service Providers (ISPs) demonstrates that
participants value and even require privacy in their interactions with
each other. They also practice price and service
discrimination [24], where they offer different qualities of
service and different prices to different partners. For this purpose,
ISPs establish bilateral Service Level Agreements, where they define
confidential details of the custom SLA and prices that one
partner offers another.
In this paper, we present a distributed mechanism for managing load in
a federated system. Our mechanism is inspired on the manner in which
ISPs collaborate. Unlike other computational economies that implement
global markets to set resource prices at runtime, our mechanism is
based on private pairwise contracts negotiated offline between
participants. Contracts set tightly bounded prices for migrating
each unit of load between two participants and specify the set of
tasks that each is willing to execute on behalf of the other. We
envision that contracts will be extended to contain additional clauses
further customizing the offered services (e.g., performance and
availability guarantees). In contrast to previous proposals, our
mechanism (1) provides privacy to all participants regarding the
details of their interactions with others, (2) facilitates service
customization and price discrimination, (3) provides a simple and
lightweight runtime load management using price pre-negotiation, and
(4) has good system-wide load balance properties.
With this bounded-price mechanism, runtime load transfers occur
only between participants that have pre-negotiated contracts, and at a
unit price within the contracted range. The load transfer mechanism
is simple: a participant moves load to another if the local processing
cost is larger than the payment it would have to make to another
participant for processing the same load (plus the migration cost).
Our work is applicable to a variety of federated systems, and is
especially motivated by distributed stream processing
applications. In these applications, data streams are continuously
pushed to servers, where they undergo significant amounts of
processing including filtering, aggregation, and correlation.
Examples of applications where this "push" model for data processing
is appropriate include financial services (e.g., price feeds), medical
applications (e.g., sensors attached to patients), infrastructure
monitoring (e.g., computer networks, car traffic), and military
applications (e.g., target detection).
Stream processing applications are well-suited to the computational
economy provided by a federated system. Data sources are often
distributed and belong to different organizations. Data streams can be
composed in different ways to create various services. Stream
processing applications also operate on large volumes of data, with
rates varying with time and often exceeding tens of thousands of
messages per second. Supporting these applications thus requires
dynamic load management. Finally, because the bulk of the processing
required by applications can be expressed with standard well-defined
operators, load movements between autonomous participants does not
require full-blown process migration.
We have designed and implemented the bounded-price mechanism in
Medusa, a federated distributed stream-processing system. Using
analysis and simulations, we show that the mechanism provides enough
incentives for selfish participants to handle each other's excess
load, improving the system's load distribution. We also show that the
mechanism efficiently distributes excess load when the aggregate load
both underloads and overloads total system capacity and that it reacts
well to sudden shifts in load. We show that it is sufficient for
contracts to specify a small price-range in order for the mechanism to
produce acceptable allocations where (1) either no participant
operates above its capacity, or (2) if the system as a whole is
overloaded, then all participants operate above their capacity.
We further show that the mechanism works well even when participants
establish heterogeneous contracts at different unit prices with each
other.
We discuss related work in the next
section. Section 3 presents the bounded-price
load management mechanism and Section 4 describes its
implementation in Medusa. We present several simulation and
experimental results in Section 5 and conclude in
Section 6.
2 Related Work
Cooperative load sharing in distributed systems has been widely
studied (see,
e.g., [10,19,22,25,41]).
Approaches most similar to ours produce optimal or near-optimal
allocations using gradient-descent, where nodes exchange load
among themselves producing successively less costly allocations. In
contrast to these approaches, we focus on environments where
participants are directed by self-interest and not by the desire to
produce a system-wide optimal allocation.
As recent applications frequently involve independently administered
entities, more efforts have started to consider participant
selfishness. In mechanism design (MD) [20,33],
agents reveal their costs to a central entity that computes the
optimal allocation and a vector of compensating payments. Agents seek
to maximize their utility computed as the difference between payment
received and processing costs incurred. Allocation and payment
algorithms are designed to optimize agents utility when the latter
reveal their true costs.
In contrast to pure mechanism design, algorithmic mechanism design
(AMD) [29,32] additionally considers the computational
complexity of mechanism implementations. Distributed algorithmic
mechanism design (DAMD) [12,14] focuses
on distributed implementations of mechanisms, since in practice a
central optimizer may not be implementable. Previous work on DAMD
schemes includes BGP-based routing [12] and
cost-sharing of multicast trees [13]. These schemes
assume that participants correctly execute payment computations. In
contrast, our load management mechanism is an example of a DAMD scheme
that does not make any such assumption because it is based on
bilateral contracts.
Researchers have also proposed the use of economic principles and
market models for developing complex distributed
systems [27]. Computational economies have been developed
in application areas such as distributed
databases [43], concurrent
applications [46], and grid
computing [4,16,44]. Most approaches use
pricing [4,9,15,16,39,43,46]: resource consumers have
different price to performance preferences and are allocated a
budget. Resource providers hold auctions to determine the price and
allocation of their resources. Alternatively, resource providers bid
for tasks [39,43], or adjust their prices
iteratively until demand matches supply [15].
These approaches to computational economies require participants to
hold and participate in auctions for every load movement, thus
inducing a large overhead. Variable load may also make prices vary
greatly and lead to frequent re-allocations [15]. If the
cost of processing clusters of tasks is different from the cumulative
cost of independent tasks, auctions become
combinatorial [31,34]3, complicating the
allocation problem. If auctions are held by overloaded agents,
underloaded agents have the choice to participate in one or many
auctions simultaneously, leading to complex market clearance and
exchange mechanisms [29]. We avoid these complexities by
bounding the variability of runtime resource prices and serializing
communications between partners. In contrast to our approach,
computational economies also make it significantly more difficult for
participants to offer different prices and different service levels to
different partners.
As an alternative to pricing, recent approaches propose to base
computational economies on bartering. SHARP [17] is an
infrastructure that enables peers to securely exchange tickets that
provide access to resources. SHARP does not address the policies that
define how the resources should be exchanged. Chun
et al. [8] propose a computational economy based on SHARP.
In their system, peers discover required resources at runtime and
trade resource tickets. A ticket is a soft claim on resources and can
be rejected resulting in zero value for the holder. In contrast, our
pairwise agreements do not specify any resource amounts and peers pay
each other only for the resources they actually use.
Service level agreements (SLAs) are widely used for Web services and
electronic commerce [3,21,37]. The contract
model we propose fits well with these SLA infrastructures.
In P2P systems, peers offer their resources to each other for
free. Schemes to promote collaboration use reputation [23],
accounting [45], auditing [30], or strategyproof
computing [28] to eliminate "free-riders" who use resources
without offering any in return. In contrast, we develop a mechanism
for participants that require tight control over their collaborations
and do not offer their resources for free.
3 The Bounded-Price Mechanism
In this section, we define the load management problem in federated
distributed systems, present the bounded-price mechanism and discuss
its properties.
3.1 Problem Statement
We are given a system comprised of a set S of autonomous
participants each with computing, network, and storage resources, and
a time varying set K of heterogeneous tasks that impose a load
on participants' resources. Each task is considered to originate at a
participant where it is submitted by a client. Since we only examine
interactions between participants, we use the terms participant
and node interchangeably. Tasks can be aggregated into larger
tasks or split into subtasks. If the load imposed by a task increases,
the increase can thus be treated as the arrival of a new task.
Similarly, a load decrease can be considered as the termination of a
task. We discuss tasks further in Section 4.
For each participant, the load imposed on its resources represents a
cost. We define a real-valued cost function of each participant
i as:
where taskseti is the subset of tasks in K running at
i.
This cost depends on the load imposed by the tasks. Each participant
monitors its own load and computes its processing cost. There are an
unlimited number of possible cost functions and each participant may
have a different one. We assume, however, that this cost is a
monotonic and convex function. Indeed, for many applications
that process messages (e.g., streams of tuples), an important cost
metric is the per message processing delay. For most scheduling
disciplines this cost is an increasing and convex function, reflecting
the increased difficulty in offering low delay service at higher
load. Figure 1 illustrates such cost function for a single
resource. We revisit Figure 1 further throughout the
section.
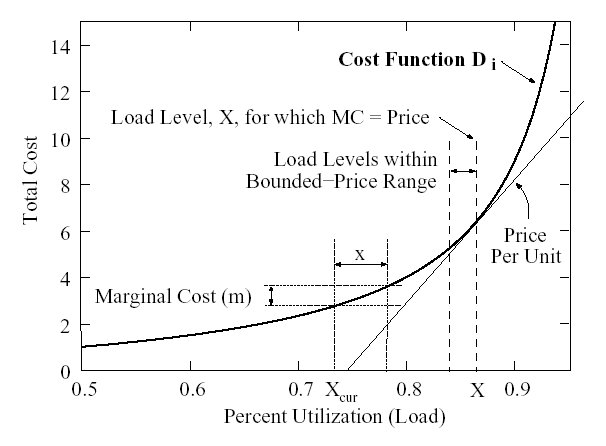 Figure 1: Prices and processing costs.
Participants are selfish and aim to maximize their utility, computed
as the difference between the processing cost,
Di(taskseti),
and the payment they receive for that
processing. When a task originates at a participant, it has a constant
per-unit load value to that participant (this value could be, for
instance, the price paid by the participant's clients for the
processing). When a task comes from another participant, the payment
made by that participant defines the task's value.
Each participant has a maximum load level corresponding to a maximum
cost, above which the participant considers itself overloaded. The
goal of a load management mechanism is to ensure that no participant
is overloaded, when spare capacity exists. If the whole system is
overloaded, the goal is to use as much of the available capacity as
possible. We seek a mechanism that produces an acceptable
allocation:
Figure 1: Prices and processing costs.
Participants are selfish and aim to maximize their utility, computed
as the difference between the processing cost,
Di(taskseti),
and the payment they receive for that
processing. When a task originates at a participant, it has a constant
per-unit load value to that participant (this value could be, for
instance, the price paid by the participant's clients for the
processing). When a task comes from another participant, the payment
made by that participant defines the task's value.
Each participant has a maximum load level corresponding to a maximum
cost, above which the participant considers itself overloaded. The
goal of a load management mechanism is to ensure that no participant
is overloaded, when spare capacity exists. If the whole system is
overloaded, the goal is to use as much of the available capacity as
possible. We seek a mechanism that produces an acceptable
allocation:
-
-
Definition: An acceptable allocation is a task distribution where (1)
no participant is above its capacity threshold, or (2)
all participants are at or above their capacity thresholds if the
total offered load exceeds the sum of the capacity thresholds.
Because the set of tasks changes with time, the allocation problem is
an online optimization. Since the system is a federation of loosely
coupled participants, no single entity can play the role of a central
optimizer and the implementation of the mechanism must be
distributed. We further examine the mechanism design aspects of our
approach in Section 3.3.
In our scheme, load movements are based on marginal costs,
MCi : (u,taskseti)-> R defined as the incremental cost for node i of
running task u given its current
taskseti. Figure 1 shows the marginal cost m
caused by adding load x, when the current load is
Xcur. Assuming the set of tasks in taskseti imposes a
total load Xcur and u imposes load x, then
MC(u,taskseti) = m. If x is one unit of load,
we call m the unit marginal cost.
3.2 Model and Algorithms
We propose a mechanism to achieve acceptable allocations based on
bilateral contracts: participants establish contracts with each other
by negotiating offline a set of tightly bounded prices for each unit
of load they will move in each direction.
-
-
Definition: A contract Ci,j between participants i and j defines a
price range: [min_price(Ci,j),max_price(Ci,j)], that constrains the runtime price
paid by participant i for each unit of load given to j.
Participants must mutually agree on what one unit of processing,
bandwidth, and storage represent. Different pairs of participants may
have contracts specifying different unit prices. There is at most one
contract for each pair of participants and each
direction. Participants may periodically renegotiate, establish, or
terminate contracts offline. We assume that the set of nodes and
contracts form a connected graph. The set of a participant's contracts
is called its contractset. We use C to denote the maximum
number of contracts that any participant has.
At runtime, participants that have a contract with each other may
perform load transfers. Based on their load levels, they agree
on a definite unit price, price(Ci,j), within the
contracted price-range, and on a set of tasks, the moveset,
that will be transferred. The participant offering load also pays its
partner a sum of price(Ci,j)*load(moveset).
3.2.1 Fixed-Price Contracts
We first present the fixed-price mechanism, where
min_price(Ci,j) = max_price(Ci,j) = FixedPrice(Ci,j).
With fixed-price contracts, if the marginal cost per unit of load of a
task is higher than the price in a contract, then processing that task
locally is more expensive than paying the partner for the
processing. Conversely, when a task's marginal cost per unit of load
is below the price specified in a contract, then accepting that task
results in a greater payment than cost increase.
Given a set of contracts, we propose a load management protocol, where
each participant concurrently runs one algorithm for shedding excess
load (Figure 2) and one for taking on new load
(Figure 3).
The basic idea in shedding excess load is for an overloaded
participant to select a maximal set of tasks from its
taskseti that cost more to process locally than they would
cost if processed by one of its partners and offer them to that
partner. Participants can use various algorithms and policies for
selecting these tasks. We present a general algorithm in
Figure 2. If the partner accepts even a subset of the
offered tasks, the accepted tasks are transferred. An overloaded
participant could consider its contracts in any order. One approach
is to exercise the lower-priced contracts first with the hope of
paying less and moving more tasks. In this paper, we ignore the task
migration costs. These costs should, however, be considered before an
offer is sent by imposing a minimum threshold between the difference
in the local and remote processing costs.
Procedure OFFER_LOAD waits between load transfers to let
local load level estimations (e.g., exponentially weighted moving
averages) catch-up with the new average load level. If no transfer is
possible, a participant retries to shed load
periodically. Alternatively, the participant may ask its partners to
notify it when their loads decrease sufficiently to accept new tasks.
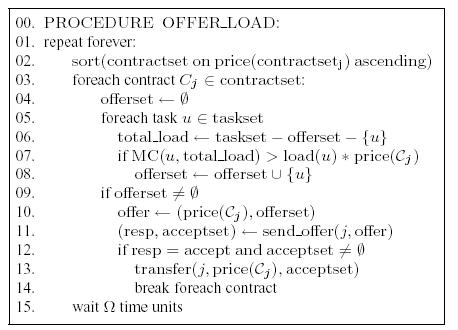 Figure 2: Algorithm for shedding excess load.
Figure 2: Algorithm for shedding excess load.
In procedure ACCEPT_LOAD (Figure 3), each
participant continuously accumulates load offers and periodically
accepts subsets of offered tasks, examining the higher unit-price
offers first. Since accepting an offer results in a load movement
(because offers are sent to one partner at the time), the participant
keeps track of all accepted tasks in the potentialset and
responds to both accepted and rejected offers. Participants that
accept a load offer cannot cancel transfers and move tasks back when
load conditions change. They can, however, use their own contracts to
move load further or to move it back.
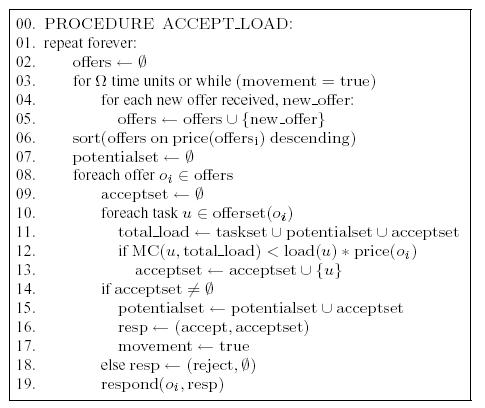 Figure 3: Algorithm for taking additional load.
Figure 3: Algorithm for taking additional load.
There are several advantages in serializing communication between
participants rather than having them offer their load simultaneously
to all their partners. The communication overhead is lower but most
importantly, the approach prevents possible overbooking as partners
always receive the load they accept. This in turn allows participants
to accept many offers at once. The only drawback is a slightly longer
worst-case convergence time.
Figure 4 illustrates three load movement scenarios. If
participant A has one or more tasks for which its marginal cost per
unit of load exceeds the price in its contract with B, these tasks
are moved in a single transfer (scenarios 1 and 2). Only those tasks,
however, for which the marginal cost per unit of load at B does not
exceed the price in the contract are transferred (scenario 3).
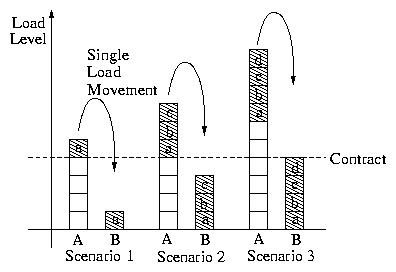 Figure 4: Three load movement scenarios for two partners.
Figure 4: Three load movement scenarios for two partners.
3.2.2 Setting Up Fixed-Price Contracts
With an approach based on fixed prices, the only tunable parameters
are the unit prices set in contracts. When a participant negotiates a
contract to shed load, it must first determine its maximum desired
load level X, and the corresponding marginal cost per unit of
load. This marginal cost is also the maximum unit price that the
participant should accept for a contract. For any higher price, the
participant risks being overloaded and yet unable to shed load. Any
price below that maximum is acceptable. Figure 1
illustrates, for a single resource and a strictly convex function, how
a load level X maps to a unit price. In general, this price is the
gradient of the cost function evaluated at X.
When a participant negotiates a contract to accept load, the same
maximum price rule applies since the participant will never be able to
accept load once it is overloaded itself. A participant, however,
should not accept a price that is too low because such price would
prevent the participant from accepting new load even though it might
still have spare capacity. The participant should rather estimate its
expected load level, select a desired load level between the expected
and maximum levels and negotiate the corresponding contract price.
Participants may be unwilling to move certain tasks to some partners
due to the sensitive nature of the data processed or because the tasks
themselves are valuable intellectual property. For this purpose,
contracts can also specify the set of tasks (or types of tasks) that
may be moved, constraining the runtime task selection. In offline
agreements, participants may also prevent their partners from moving
their operators further thus constraining the partner's task
selections.
To ensure that a partner taking over a task provides enough resources
for it, contracts may also specify a minimum per-message processing
delay (or other performance metric). A partner must meet these
constraints or pay a monetary penalty. Such constraints are
commonplace in SLAs used for Web services, inter-company workflows or
streaming services [18]. Infrastructures exist to enforce them
through automatic
verification [3,21,37,38]. In the rest
of this paper, we assume that such infrastructure exists and that
monetary penalties are high enough to discourage any contract
breaches. To avoid breaching contracts when load increases,
participants may prioritize tasks already running over newly arriving
tasks.
3.2.3 Extending the Price Range
Fixed-price contracts do not always produce acceptable allocations.
For instance, load cannot propagate through a chain of identical
contracts. A lightly loaded node in the middle of a chain accepts new
tasks as long as its marginal cost is strictly below the
contract price. The node eventually reaches maximum capacity (as
defined by the contract prices) and refuses additional load. It does
not offer load to partners that might have spare capacity, though,
because its unit marginal cost is still lower than any of its contract
prices. Hence, if all contracts are identical, a task can only
propagate one hop away from its origin.
To achieve acceptable allocations for all configurations, participants
thus need to specify a small range of prices,
[FixedPrice-D;FixedPrice], in their
contracts. Such price range allows a participant to forward load from
an overloaded partner to a more lightly loaded one by accepting tasks
at a higher price and offering them at a lower price. When a contract
specifies a small price-range, for each load transfer, partners must
dynamically negotiate the final unit price within the range. Since a
fixed unit price equals the gradient (or derivative) of the
cost curve at some load level, a price range converts into a load
level interval as illustrated in Figure 1. The price range
is the difference in the gradients of the cost curve at interval
boundaries.
We now derive the minimal contract price-range that ensures
convergence to acceptable allocations. We analyze a network of
homogeneous nodes with identical contracts. We explore heterogeneous
contracts through simulations in Section 5. For clarity of
exposition, we also assume in the analysis that all tasks are
identical to the smallest migratable task, u and impose the
same load. We use k u to denote a set of k tasks.
We define dk as the decrease in unit marginal cost
due to removing k tasks from a node's taskset:
|
dk(taskset) = |
MC(u,taskset-u)-MC(u,taskset-(k+1)u)
load(u)
|
|
| (2) |
dk is thus approximately the difference in the cost function
gradient evaluated at the load level including and excluding the k
tasks.
Given a contract with price, FixedPrice, we define
tasksetF as the maximum set of tasks that a node can
handle before its per-unit-load marginal cost exceeds
FixedPrice and triggers a load movement. I.e.,
tasksetF satisfies:
MC(u,tasksetF-u) <= load(u) * FixedPrice and MC(u,tasksetF) > load(u) * FixedPrice.
With all contracts in the system specifying the same price range,
[FixedPrice -D, FixedPrice] such that D = d1(tasksetF), any task can now travel two hops. A
lightly loaded node accepts tasks at
FixedPrice until its load reaches that of
tasksetF. The node then alternates between
offering one task u at price FixedPrice -d1(tasksetF) and accepting one task at
FixedPrice. This scenario is shown in
Figure 5. Similarly, for load to travel through a chain
of M+1 nodes (or M transfers) the price range must be at least
dM-1(tasksetF). The jth node in such a chain
alternates between accepting a task at price FixedPrice -dj-1(tasksetF) and offering it
at price FixedPrice - dj(tasksetF).
A larger price range speeds-up load movements through a chain because
more tasks can be moved at each step. With a larger price range,
however, nodes unit marginal costs are more likely to fall within the
dynamic range requiring a price negotiation. A larger range thus
increases runtime overhead, price volatility and the number of
re-allocations caused by small load variations. Our goal is therefore
to keep the range as small as possible and extend it only enough to
ensure convergence to acceptable allocations.
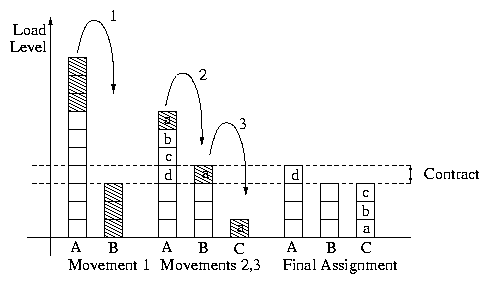 Figure 5: Load movements between three nodes using a small price-range.
For underloaded systems to always converge to acceptable allocations,
tasks must be able to travel as far as the diameter M of the network
of contracts. The minimal price range should then be
dM-1(tasksetF).
Figure 5: Load movements between three nodes using a small price-range.
For underloaded systems to always converge to acceptable allocations,
tasks must be able to travel as far as the diameter M of the network
of contracts. The minimal price range should then be
dM-1(tasksetF).
-
-
Lemma 1
In a network of homogeneous nodes, tasks, and contracts, to ensure
convergence to acceptable allocations in underloaded systems, the unit
price range in contracts must be at least:
[FixedPrice-
dM-1(tasksetF),FixedPrice],
where M is the diameter of the network of contracts and
tasksetF is the set of tasks that satisfies MC(u,tasksetF-u) <= load(u) * FixedPrice and MC(u,tasksetF) > load(u) * FixedPrice.
When the system is overloaded, a price range does not lead to an
acceptable-allocation (where forall i in S : Di(taskseti) >= Di(tasksetiF)). In the final
allocation, some participants may have a marginal cost as low as
FixedPrice-dM(tasksetiF) (wider ranges
do not improve this bound). For overloaded systems, price-range
contracts therefore achieve nearly acceptable allocations
defined as:
-
-
Definition: A nearly acceptable allocation satisfies forall i
in S : Di(taskseti) > Di(tasksetiF-Mu)
Price ranges modify the load management protocol as follows. Initial
load offers are made at the lowest price. If no task can be accepted,
the partner proposes a higher price. Upon receiving such a
counter-offer, if the new price is still its best alternative, a
participant recomputes the offerset. If the set is empty,
it suggests a new price in turn. Negotiation continues until both
parties agree on a price or no movement is possible. Other negotiation
schemes are possible.
3.3 Properties
The goal of mechanism design [33] is to implement an
optimal system-wide solution to a decentralized optimization problem,
where each agent holds an input parameter to the problem and prefers
certain solutions over others. In our case, agents are participants
and optimization parameters are participants' cost functions and
original sets of tasks. The system-wide goal is to achieve an
acceptable allocation while each participant tries to optimize its
utility. Our mechanism is indirect: participants reveal their
costs and tasks indirectly by offering and accepting tasks rather than
announcing their costs directly to a central optimizer or to other
agents.
A mechanism defines the set of strategies S available to agents and
an outcome rule, g : SN -> O, that maps all possible
combinations of strategies adopted by agents to an outcome O. With
fixed-price contracts, the runtime strategy-space of participants is
reduced to only three possible strategies: (1) accept load at the
pre-negotiated price, (2) offer load at the pre-negotiated price, or
(3) do neither.4 The desired outcome is an acceptable allocation.
Similarly to the definition used in Sandholm
et. al. [40], our mechanism is individual
rational (i.e., a participant may not decrease its utility by
participating) on a per load movement basis. Each agent increases its
utility by accepting load when the price exceeds the per-unit-load
marginal cost (because in that case the increase in payment, pi,
exceeds the increase in cost, Di) and offer load in the opposite
situation. For two agents and one contract this strategy is also
dominant because compared to any other strategy, it optimizes an
agent's utility independently of what the other agent does.
For multiple participants and contracts, the strategy space is
richer. Participants may try to optimize their utility by accepting
too much load with the hope of passing it on at a lower
price. Assuming, however, that participants are highly
risk-averse: they are unwilling to take on load unless they can
process it at a lower cost themselves because they risk paying
monetary penalties, the strategy of offering and accepting load
only when marginal costs are strictly higher or lower than prices
respectively, is an optimal strategy. This strategy is not dominant,
though, because it is technically possible that a participant has a
partner that always accepts load at a low price. In specific
situations, the order in which participants contact each other may
also change their utility due to simultaneous moves by other
participants.
These properties also hold for price-range contracts, when
participants' marginal costs are far from range boundaries. Within a
range, participants negotiate, thus revealing their costs more
directly. Reaching an agreement is individual-rational since moving
load at a price between participants' marginal costs increases both
their utilities. Partners thus agree on a price within the range, when
possible.
Our mechanism is also a distributed algorithmic mechanism
(DAM) [12,14] since the implementation is
(1) distributed: there is no central optimizer, and (2) algorithmic:
the computation and communication complexities are both polynomial
time, as we show below. Because our mechanism is indirect, it differs
from previous DAMD approaches [12,14]
that focus on implementing the same payment computation as would a
central optimizer but in an algorithmic and distributed fashion. An
important assumption made in these implementations is that agents are
either separate from the entities computing the payment
functions [14] or that they compute the payments
honestly [12]. Our mechanism does not need to make
any such assumption.
Because each load transfer takes place only if the marginal cost of
the node offering load is strictly greater than that of the node
accepting the load, successive allocations strictly decrease the sum
of all costs. Under constant load, movements thus always eventually
stop. If all participants could talk to each other, the final
allocation would always be acceptable and Pareto-optimal: i.e.,
no agent could improve its utility without another agent decreasing
its own utility. In our mechanism, however, participants only exchange
load with their direct partners and this property does not
hold. Instead, for a given load, the bounded-price mechanism limits
the maximum difference in load levels that can exist between
participants once the system converges to a final allocation. If a
node has at least one task for which the unit marginal cost is greater
than the upper-bound price of any of the node's contracts, then all
its partners must have a load level such that an additional task would
have an average unit marginal cost greater than the upper-bound price
in their contract with the overloaded node. If a partner had a lower
marginal cost, it would accept its partner's excess task at the
contracted price. This property and the computation of the minimal
price ranges yield the following theorem:
Theorem 2
If nodes, contracts and tasks are homogeneous, and contracts are set
according to Lemma 1, the final allocation is an
acceptable allocation for underloaded systems and a nearly acceptable
allocation for overloaded systems.
In Section 5, we analyze heterogeneous settings using
simulations and find that in practice, nearly acceptable allocations
are also reached in such configurations.
Another property of the fixed-price mechanism is its fast convergence
and low communication overhead. Task selection is the most complex
operation and is performed once for each load offer and once for each
response. Therefore, in a system with aN overloaded
participants, under constant load, in the best case, all excess tasks
require a single offer and are moved in parallel, for a convergence
time of O(1). In the worst case, the overloaded participants form a
chain with only the last participant in the chain having spare
capacity. In this configuration, participants must shed load one at
the time, through the most expensive of their C contracts, for a
worst case convergence time of O(N C). If nodes use notifications
when they fail to shed load, the worst-case is reduced to
O(N+C). For auctions, the worst-case convergence time is O(N) in
this configuration. To summarize:
Lemma 3
For N nodes with at most C contracts each, the fixed-price
mechanism has a convergence time of O(1) in the
best case and O(N+C) in the worst case if notifications are used.
With our mechanism, most load movements require as few as three
messages: an offer, a response, and a load movement. The best-case
communication complexity is thus O(N). In contrast, an approach
based on auctions has a best-case communication overhead of O(NC) if
the auction is limited to C partners and O(N2) if not. If the
whole system is overloaded and participants must move load through a
chain of most-expensive contracts, the worst-case complexity may be as
high as O(N2 C), mostly because each participant periodically tries
to shed load. If, however, the notifications described above are used,
the worst-case communication overhead is only O(N C). The same
worst-case communication overhead applies to auctions. In summary:
Lemma 4
To converge, the fixed-price contracts mechanism imposes a best-case
communication overhead of O(N) and a worst-case overhead of O(NC) if notifications are used.
Compared to auctions, our scheme significantly reduces the
communication overhead, for a slight increase in worst-case
convergence time. Simulation results (Section 5) show that
the convergence time is short in practice.
When contracts specify a small price-range, most load movements take
place outside of the range and the mechanism preserves the properties
above. If, however, the optimal load allocation falls exactly within
the small price-range, final convergence steps require more
communication and may take longer to achieve, but at that point, the
allocations are already acceptable. When load is forwarded through a
chain, the complexity grows with the length of the chain and the
amount of load that needs to be forwarded through that chain. In
practice, though, long chains of overloaded nodes are a pathological,
thus rare, configuration.
4 System Implementation
In this section, we describe the implementation of the bounded-price
mechanism in the Medusa distributed stream-processing system.
4.1 Streams and Operators
In stream-processing applications, data streams produced by
sensors or other data sources are correlated and aggregated by
operators to produce outputs of interest. A data stream is a
continuous sequence of attribute-value tuples that conform to some
pre-defined schema. Operators are functions that transform one or more
input streams into one or more output streams. A loop-free, directed
graph of operators is called a continuous query, because it
continuously processes tuples pushed on its input streams.
Stream processing applications are naturally distributed. Many
applications including traffic management and financial feed analysis
process data from either geographically distributed sources or
different autonomous organizations. Medusa uses Aurora [1]
as its query processor. Medusa takes Aurora queries and arranges for
them to be distributed across nodes and participants, routing tuples
and results as appropriate.
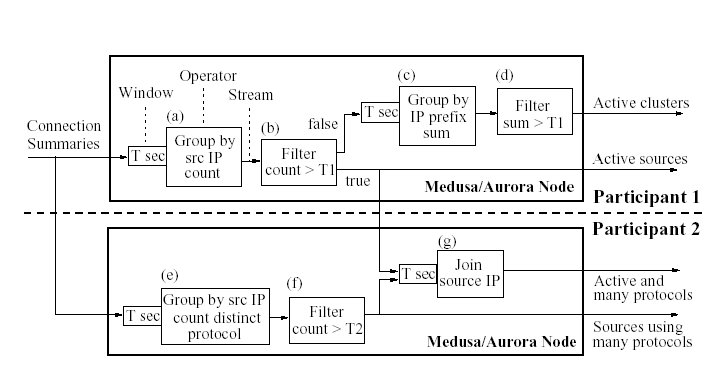 Figure 6: Example of a distributed Medusa query.
Figure 6 shows an example of a Medusa/Aurora
query. The query, inspired from Snort [36] and
Autofocus [11], is a simple network intrusion detection
query. Tuples on input streams summarize one network connection each:
source and destination IPs, time, protocol used, etc. The query
identifies sources that are either active (operators a and
b) or used abnormally large numbers of protocols within a
short time period (operators e and f) or both
(operator
g). The query also identifies clusters of active sources
(operators c and d). To count the number of
connections or protocols the query applies windowed aggregate
operators (a, c, and e): these operators
buffer connection information for a time period T, group the
information by source IP and apply the desired aggregate function.
Aggregate values are then filtered to identify the desired type
of connections. Finally, operator g joins active
sources with those using many protocols to identify sources that
belong in both categories.
The phrases in italics in the previous paragraph correspond to
well-defined operators. While the system allows user-defined
operators, our experience with a few applications suggests that
developers will implement most application logic with built-in
operators. In addition to simplifying application construction and
providing query optimization opportunities, using standard operators
facilitates Medusa's task movements between participants.
Medusa participants use remote definitions to move tasks with
relatively low overhead compared to full-blown process migration.
Remote definitions specify how operators on different nodes map on to
each other. At runtime, when a path of operators in the
boxes-and-arrows diagram needs to be moved to another node, all that's
required is for the operators to be instantiated remotely and for the
incoming streams to be diverted to the appropriately named inputs on
the new node. Our current prototype does not move operator state. The
new instance re-starts the computation from an empty state. We plan to
explore moving operator state in future work.5
For stream-processing, the algorithm for selecting tasks to offload to
another participant must take into account the data flow between
operators. It is preferable to cluster and move together operators
that are linked with a high-rate stream or even simply belong to the
same continuous query. In this paper we investigate the general
federated load management problem and do not take advantage of
possible relations between tasks to optimize their placement. In
stream processing it is also often possible to partition input
streams [41] and by doing so handle the load increase of a
query network as a new query network. We make this assumption in this
paper.
Figure 6: Example of a distributed Medusa query.
Figure 6 shows an example of a Medusa/Aurora
query. The query, inspired from Snort [36] and
Autofocus [11], is a simple network intrusion detection
query. Tuples on input streams summarize one network connection each:
source and destination IPs, time, protocol used, etc. The query
identifies sources that are either active (operators a and
b) or used abnormally large numbers of protocols within a
short time period (operators e and f) or both
(operator
g). The query also identifies clusters of active sources
(operators c and d). To count the number of
connections or protocols the query applies windowed aggregate
operators (a, c, and e): these operators
buffer connection information for a time period T, group the
information by source IP and apply the desired aggregate function.
Aggregate values are then filtered to identify the desired type
of connections. Finally, operator g joins active
sources with those using many protocols to identify sources that
belong in both categories.
The phrases in italics in the previous paragraph correspond to
well-defined operators. While the system allows user-defined
operators, our experience with a few applications suggests that
developers will implement most application logic with built-in
operators. In addition to simplifying application construction and
providing query optimization opportunities, using standard operators
facilitates Medusa's task movements between participants.
Medusa participants use remote definitions to move tasks with
relatively low overhead compared to full-blown process migration.
Remote definitions specify how operators on different nodes map on to
each other. At runtime, when a path of operators in the
boxes-and-arrows diagram needs to be moved to another node, all that's
required is for the operators to be instantiated remotely and for the
incoming streams to be diverted to the appropriately named inputs on
the new node. Our current prototype does not move operator state. The
new instance re-starts the computation from an empty state. We plan to
explore moving operator state in future work.5
For stream-processing, the algorithm for selecting tasks to offload to
another participant must take into account the data flow between
operators. It is preferable to cluster and move together operators
that are linked with a high-rate stream or even simply belong to the
same continuous query. In this paper we investigate the general
federated load management problem and do not take advantage of
possible relations between tasks to optimize their placement. In
stream processing it is also often possible to partition input
streams [41] and by doing so handle the load increase of a
query network as a new query network. We make this assumption in this
paper.
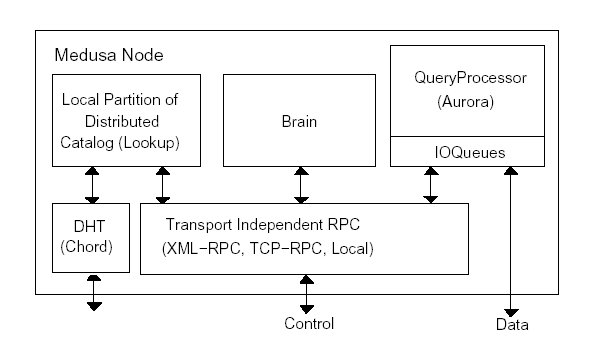 Figure 7: Medusa software structure.
Figure 7: Medusa software structure.
4.2 Medusa Software Architecture
Figure 7 shows the Medusa software structure. Each
Medusa node runs one instance of this software. There are two
components in addition to the Aurora query processor. The first
component, called Lookup, is a client of an inter-node
distributed catalog (implemented using a distributed hash
table [42]) that holds information on streams, schemas and
queries running in the system. The Brain component monitors
local load conditions by periodically asking the QueryProcessor
for the average input and output rates measured by the IOQueues
(which serve to send and receive tuples to and from clients or other
Medusa nodes) as well as for rough estimates of the local CPU
utilization of the various operators. Brain uses this load
information as input to the bounded-price mechanism that manages load.
5 Evaluation
In previous sections, we showed some properties of our mechanism and
computed the best- and worst-case complexities. In this section, we
complete the evaluation using simulations and experiments. We first
examine the convergence to acceptable allocations in a network of
heterogeneous nodes. We simulate heterogeneity by setting contracts at
randomly selected prices. Second, we study the average convergence speed
in large and randomly created topologies. Third, we examine how our
approach to load management reacts to load variations. Finally, we
examine how Medusa performs on a real application by running the network
intrusion detection query, presented in Section 4, on logs of
network connections.
We use the CSIM discrete event simulator [26] to study a
995-node Medusa network.
We simulate various random topologies, increasing the minimum number of
contracts per node, which has the effect of reducing the diameter of the
contract network. To create a contract network, each node first
establishes a bilateral contract with an already connected node, forming
a tree. Nodes that still have too-few contracts then randomly select
additional partners. With this algorithm, the difference between the
numbers of contracts that nodes have is small, as shown in
Table 1.
Each node runs a set of independent and identical operators that process
tuples at a cost of 50 ms/tuple. We set the input rate on each
stream to 500 tuples/s (or 500 KBps). Assuming that each node has one
100 Mbps output link, each operator uses 4% of the bandwidth and 2.5%
of CPU. We select these values to model a reasonable minimum migratable
unit. In practice, tasks are not uniform and the amount of resources
each task consumes bounds how close a participant's marginal cost can
get to a contract price without crossing it. When we examine
convergence properties, we measure overload and available capacity in
terms of the number of tasks that can be offered or accepted, rather
than exact costs or load. All nodes use the same convex cost function:
the total number of in-flight tuples (tuples being processed and tuples
awaiting processing in queues).
| min # of contracts | 1 | 3 | 5 | 7 | 9 | 10 |
| max # of contracts | 11 | 13 | 14 | 15 | 17 | 18 |
| avg diameter | 19 | 8 | 6 | 5 | 4 | 4 |
Table 1: Max number of contracts per node and network
diameter for increasing min numbers of contracts.
5.1 Convergence to Acceptable Allocations
In this section, we study load distribution properties for networks of
heterogeneous contracts. We compare the results to those achieved using
homogeneous contracts and show that our approach works well in
heterogeneous systems. We also simulate fixed-price contracts and show
that such contracts have good properties in practice, even though they
do not always lead to acceptable allocations.
We thus study and compare the convergence properties of four variants
of the mechanism: (1) Fixed, where all contracts set an
identical fixed-price, (2) Range, where all contracts are
uniform but define a small price-range, (3)
Random Fixed, where contracts specify fixed but
randomly chosen prices, and Random Range, where
contracts define randomly selected price-ranges. Table 2
summarizes the price selection used for each type of contract. We
limit price ranges to the variation in marginal cost resulting from
moving only two tasks. This range is much smaller than required in
theory to ensure acceptable allocations: the range is half the
theoretical value for the smallest network diameter that we simulate
(Table 1).
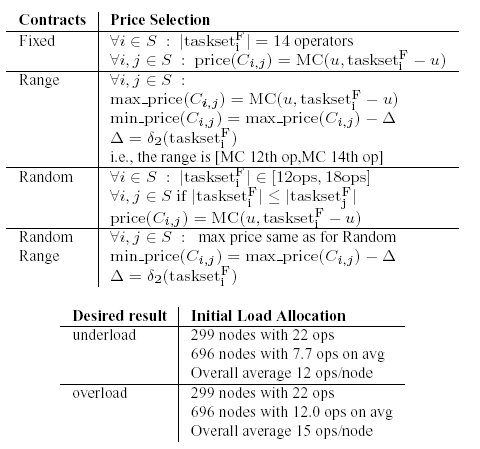 Table 2: Simulated configurations. u is one operator.
d2(tasksetF) is defined in Section 3.2.3.
Starting from skewed load assignments, as summarized in
Table 2, we examine how far the final allocation is from
being acceptable. For an underloaded system, we measure the total
excess load that nodes were unable to move
(Figure 8). For an overloaded system, we
measure the unused capacity that remains at different nodes
(Figure 9)6. In both figures, the column with zero minimum
number of contracts shows the excess load and available capacity that
exist before any reallocation.
Table 2: Simulated configurations. u is one operator.
d2(tasksetF) is defined in Section 3.2.3.
Starting from skewed load assignments, as summarized in
Table 2, we examine how far the final allocation is from
being acceptable. For an underloaded system, we measure the total
excess load that nodes were unable to move
(Figure 8). For an overloaded system, we
measure the unused capacity that remains at different nodes
(Figure 9)6. In both figures, the column with zero minimum
number of contracts shows the excess load and available capacity that
exist before any reallocation.
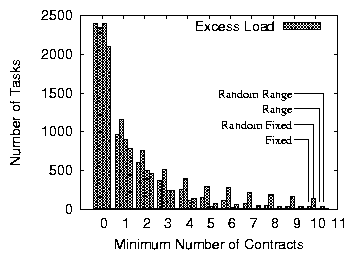 Figure 8: Excess load for the final allocation in an underloaded network of 995 nodes.
First column shows excess load before any load movement.
Figure 8: Excess load for the final allocation in an underloaded network of 995 nodes.
First column shows excess load before any load movement.
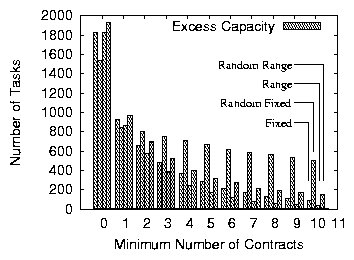 Figure 9: Left-over capacity for the final allocation in an overloaded network of 995 nodes.
With the Fixed variant of the mechanism, we examine the
properties of an underloaded system whose fixed contract prices are
above the average load level and those of an overloaded system where
prices are below average load. As shown in
Figures 8 and 9, as the
number of contracts increases, the quality of the final allocation
improves: nodes manage to reallocate a larger amount of excess load or
exploit a larger amount of available capacity. With a minimum of 10
contracts, nodes successfully redistribute over 99% of excess load in
the underloaded scenario and use over 95% of the initially available
capacity in the overloaded case. The system thus converges to an
allocation close to acceptable in both cases. Hence, even though they
do not work well for specific configurations (as discussed in
Section 3.2.3), fixed-price contracts can lead to allocations
close to acceptable for randomly generated configurations.
We re-run all simulations replacing fixed prices with a price range
and observe the improvement in final allocation. We choose the price
range to fall within the two load levels of 12 and 15 operators per
node (Table 2, variant Range). The results,
also presented in Figures 8
and 9, show that a minimum of seven contracts
achieves an acceptable allocation. At that moment, the diameter of the
network is five (Table 1) so the price-range is half
the theoretically required value. When the system is overloaded, over
98% of available capacity is successfully used with a minimum of 10
contracts per node. Additionally, nodes below their capacity have room
for only one additional operator. The final allocation is thus nearly
acceptable, as defined in Section 3.2.3. This result shows
that price ranges, even smaller than the theoretically computed
values, suffice to achieve acceptable or nearly acceptable allocations
in randomly generated configurations.
In practice, contracted prices will be heterogeneous. We thus simulate
the same network of contracts again but with randomly selected prices
(Random Fixed variant). To pick prices, each
participant randomly selects a maximum capacity between 12 and 18
operators. When two participants establish a contract, they use the
lower of their maximums as the fixed price. We find that random
fixed-price contracts are less efficient than homogeneous contracts
but they also achieve allocations close to acceptable (94% of excess
load is re-allocated with 10 contracts as shown in
Figure 8). Because we measure the capacity at
each node as the number of operators that the node can accept before
its marginal cost reaches its highest contracted price, when the
number of contracts increases, so does the measured capacity. This in
turn makes heterogeneous-price contracts appear less efficient than
they actually are at using available capacity. The range of prices
from which contracts are drawn is such that when each node has at
least three contracts, the initially available capacity is roughly the
same as with homogeneous contracts.
Finally, we explore heterogeneous price ranges by adding a lower price
bound to each randomly chosen fixed price
(Random Range variant). As shown in
Figures 8 and 9,
heterogeneous price-range contracts have similar properties to the
uniform price-ranges. The final allocation is slightly worse than in
the uniform case because nodes with small capacity impede load
movements through chains and measured capacity increases with the
number of contracts. We find, however, that in the underloaded case
nodes were at most 2.1 operators above their threshold (average of
multiple runs) and in the underloaded case nodes had at most capacity
left for 2.5 operators. Heterogeneous prices thus lead to allocations
close to acceptable ones.
Figure 9: Left-over capacity for the final allocation in an overloaded network of 995 nodes.
With the Fixed variant of the mechanism, we examine the
properties of an underloaded system whose fixed contract prices are
above the average load level and those of an overloaded system where
prices are below average load. As shown in
Figures 8 and 9, as the
number of contracts increases, the quality of the final allocation
improves: nodes manage to reallocate a larger amount of excess load or
exploit a larger amount of available capacity. With a minimum of 10
contracts, nodes successfully redistribute over 99% of excess load in
the underloaded scenario and use over 95% of the initially available
capacity in the overloaded case. The system thus converges to an
allocation close to acceptable in both cases. Hence, even though they
do not work well for specific configurations (as discussed in
Section 3.2.3), fixed-price contracts can lead to allocations
close to acceptable for randomly generated configurations.
We re-run all simulations replacing fixed prices with a price range
and observe the improvement in final allocation. We choose the price
range to fall within the two load levels of 12 and 15 operators per
node (Table 2, variant Range). The results,
also presented in Figures 8
and 9, show that a minimum of seven contracts
achieves an acceptable allocation. At that moment, the diameter of the
network is five (Table 1) so the price-range is half
the theoretically required value. When the system is overloaded, over
98% of available capacity is successfully used with a minimum of 10
contracts per node. Additionally, nodes below their capacity have room
for only one additional operator. The final allocation is thus nearly
acceptable, as defined in Section 3.2.3. This result shows
that price ranges, even smaller than the theoretically computed
values, suffice to achieve acceptable or nearly acceptable allocations
in randomly generated configurations.
In practice, contracted prices will be heterogeneous. We thus simulate
the same network of contracts again but with randomly selected prices
(Random Fixed variant). To pick prices, each
participant randomly selects a maximum capacity between 12 and 18
operators. When two participants establish a contract, they use the
lower of their maximums as the fixed price. We find that random
fixed-price contracts are less efficient than homogeneous contracts
but they also achieve allocations close to acceptable (94% of excess
load is re-allocated with 10 contracts as shown in
Figure 8). Because we measure the capacity at
each node as the number of operators that the node can accept before
its marginal cost reaches its highest contracted price, when the
number of contracts increases, so does the measured capacity. This in
turn makes heterogeneous-price contracts appear less efficient than
they actually are at using available capacity. The range of prices
from which contracts are drawn is such that when each node has at
least three contracts, the initially available capacity is roughly the
same as with homogeneous contracts.
Finally, we explore heterogeneous price ranges by adding a lower price
bound to each randomly chosen fixed price
(Random Range variant). As shown in
Figures 8 and 9,
heterogeneous price-range contracts have similar properties to the
uniform price-ranges. The final allocation is slightly worse than in
the uniform case because nodes with small capacity impede load
movements through chains and measured capacity increases with the
number of contracts. We find, however, that in the underloaded case
nodes were at most 2.1 operators above their threshold (average of
multiple runs) and in the underloaded case nodes had at most capacity
left for 2.5 operators. Heterogeneous prices thus lead to allocations
close to acceptable ones.
5.2 Convergence Speed
Figure 10(a) shows how the total cost decreases with time
in the underloaded network of 995 nodes with a minimum of five
contracts per node. In the simulation, each node tried to move load at
most once every 2 seconds (no movements were allowed within the first
5 seconds of the simulation). For all variants, the cost
decreases quickly and reaches values close to the final minimum within
as few as 15 seconds of the first load movement. This fast
convergence is partly explained by the ability of the bounded-price
mechanism to balance load between any pair of nodes in a single
iteration and partly by the ability of our mechanism to balance load
simultaneously at many locations in the network. Fixed-price variants
have a somewhat sharper decrease while also leading to a final
allocation close to acceptable.
Figures 10(b) and (c) show the convergence speed measured
as the number of load transfers (Movements) and the number
of operators moved for homogeneous contracts (random prices produce
almost identical trends). For both variants, the first load movements
re-allocate many operators, leading to the fast decrease in the total
cost in early phases of the convergence. Fixed-price contracts
converge faster than price-range contracts because more operators can
be moved at once. The convergence also stops more quickly but, as
shown above, the allocation is slightly worse than with a small price
range.
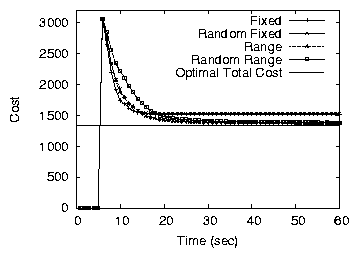
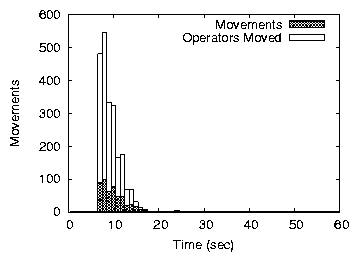
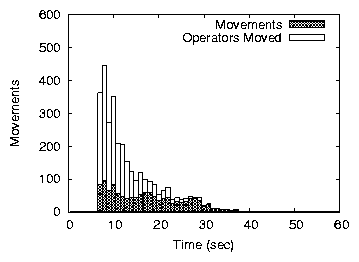 Figure 10: Convergence speed in an underloaded network of 995 nodes.
Figure 10: Convergence speed in an underloaded network of 995 nodes.
5.3 Stability under Changing Load
Next, we examine how the mechanism responds to sudden step-shifts in
load. A bad property would be for small step shifts in load to lead to
excessive re-allocations. We subject a network of 50 nodes (with a
minimum of three fixed or three price-range contracts per node) to a
sudden load increase (at time 60 sec) and a sudden load decrease (at
time 120 sec). We run two series of experiments. We first create a
large variation with 30% extra load (10 extra operators each to 10
different nodes). We then repeat the experiment adding only 15% extra
load. Figure 11 shows the total cost and operator
movements registered during the simulation.
A 30% load increase, concentrated around a few nodes, makes these
nodes exceed their capacity leading to a few re-allocations both with
fixed prices and price ranges. Fixed prices, however, produce fewer
re-allocations because convergence stops faster. When load is removed,
spare capacity appears. If nodes use a price range, a small number of
re-allocations follows. With fixed-prices, since nodes all run within
capacity before the load is removed, nothing happens. The 15% load
increase leads to an almost insignificant number of movements even
when a small price-range is used. Indeed, fewer nodes exceed their
capacity and load variations within capacity do not lead to
re-allocations. Both variants of the mechanism thus handle load
variations without excessive re-allocations.
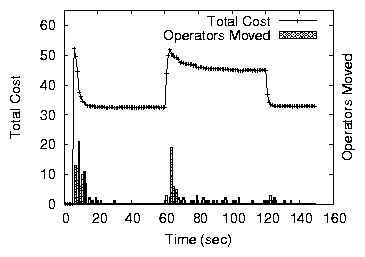
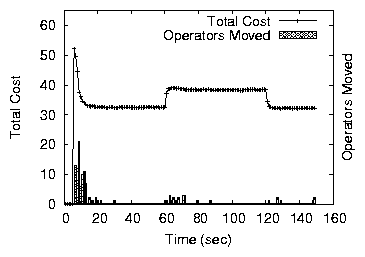
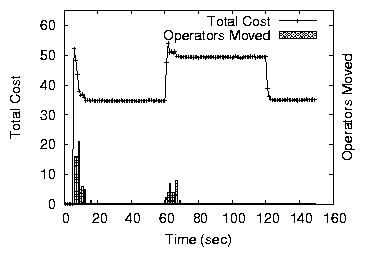 Figure 11: Assignment stability under variable load. Load added at
60 sec and removed at 120 sec.
Figure 11: Assignment stability under variable load. Load added at
60 sec and removed at 120 sec.
5.4 Prototype Experiments
We evaluate our prototype on the network intrusion detection query (with
60 sec windows and without the final join) running on network connection
traces collected at MIT (1 hour trace from June 12, 2003) and at an ISP
in Utah (1 day trace from April 4, 2003). To reduce the possible
granularity of load movements, we partition the Utah log into four
traces that are streamed in parallel, and the MIT log into three traces
that are streamed in parallel. To increase the magnitude of the load, we
play the Utah trace with a 20× speed-up and the MIT trace with an
8× speed-up.
Figure 12 illustrates our experimental setup. Node
0 initially processes all partitions of the Utah and MIT traces. Nodes 1
and 2 process 2/3 and 1/3 of the MIT trace, respectively. Node 0 runs
on a desktop with a Pentium(R) 4, 1.5GHz and 1GB of memory. Nodes 1 and
2 run on a Pentium III TabletPC with 1.33GHz and 1GB of memory. The
nodes communicate over a 100 Mbps Ethernet. All clients are initially on
the same machines as the nodes running their queries. All Medusa nodes
have fixed-price contracts with each other and are configured to take or
offer load every 10 seconds.
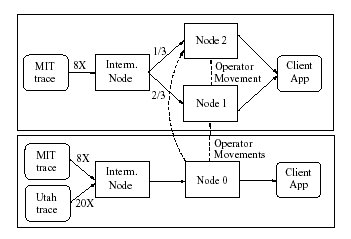 Figure 12: Experimental setup.
Figure 13 shows the results obtained. Initially, the
load at each node is approximately constant. At around 650 seconds (1)
the load on the Utah trace starts increasing and causes Node 0 to shed
load to Node 1, twice (on Figure 13 these movements are
labeled (2) and (3)). After the second movement, load increases
slightly but Node 1 refuses additional load making Node 0 move some
operators to Node 2 (4). The resulting load allocation is not uniform
but it is acceptable. At around 800 seconds (5), Node 1 experiences a
load spike, caused by an increase in load on the MIT trace. The spike
is long enough to cause a load movement from Node 1 to Node 2 (6),
making all nodes operate within capacity again. Interestingly, after
the movement the load on Node 1 decreases. This decrease does not
cause further re-allocations as the allocation remains acceptable.
Figure 12: Experimental setup.
Figure 13 shows the results obtained. Initially, the
load at each node is approximately constant. At around 650 seconds (1)
the load on the Utah trace starts increasing and causes Node 0 to shed
load to Node 1, twice (on Figure 13 these movements are
labeled (2) and (3)). After the second movement, load increases
slightly but Node 1 refuses additional load making Node 0 move some
operators to Node 2 (4). The resulting load allocation is not uniform
but it is acceptable. At around 800 seconds (5), Node 1 experiences a
load spike, caused by an increase in load on the MIT trace. The spike
is long enough to cause a load movement from Node 1 to Node 2 (6),
making all nodes operate within capacity again. Interestingly, after
the movement the load on Node 1 decreases. This decrease does not
cause further re-allocations as the allocation remains acceptable.
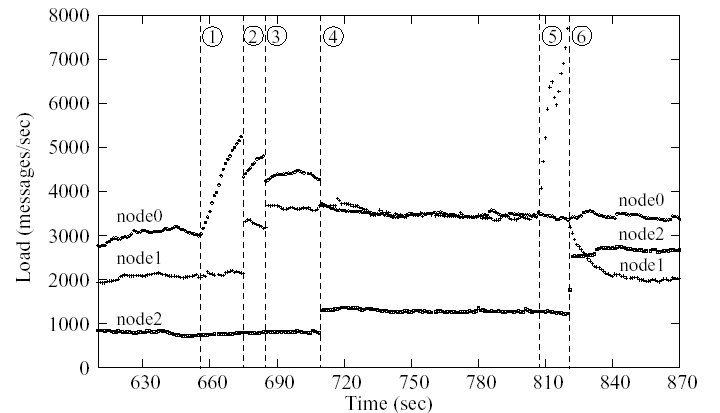 Figure 13: Load at three Medusa nodes running the network
intrusion detection query over network connection traces.
In our experimental setup, it takes approximately 75 ms to move a query
fragment between two nodes. Each movement proceeds as follows. The
origin node sends to the remote node a list of operators and stream
subscriptions (i.e., a list of client applications or other Medusa nodes
currently receiving the query output streams). The remote node
instantiates the operators locally, subscribes itself to the query input
streams, starts the query, and sets up the subscriptions to the output
streams. After the remote query starts, the origin node drains
accumulated tuples and deletes the query. Both nodes update the catalog
asynchronously. When a query moves, client applications see a small
number of duplicate tuples because the new query starts before the old
one stops. They may also see some reordering if the origin node was
running behind before the move.
In our current implementation, we do not send the state of operators
to the remote location. This approach works well for all stateless
operators such as filter, map, and union as well as
for operators that process windows of tuples without keeping state
between windows (e.g., windowed joins and some types of
aggregates). For these latter operators, a movement disrupts the
computation over only one window. For more stateful operators, we
should extend the movement protocol to include freezing the state of
the original query, transferring the query with that state, and
re-starting the query from the state at the new location. We plan to
explore the movements of stateful operators in future work.
Figure 13: Load at three Medusa nodes running the network
intrusion detection query over network connection traces.
In our experimental setup, it takes approximately 75 ms to move a query
fragment between two nodes. Each movement proceeds as follows. The
origin node sends to the remote node a list of operators and stream
subscriptions (i.e., a list of client applications or other Medusa nodes
currently receiving the query output streams). The remote node
instantiates the operators locally, subscribes itself to the query input
streams, starts the query, and sets up the subscriptions to the output
streams. After the remote query starts, the origin node drains
accumulated tuples and deletes the query. Both nodes update the catalog
asynchronously. When a query moves, client applications see a small
number of duplicate tuples because the new query starts before the old
one stops. They may also see some reordering if the origin node was
running behind before the move.
In our current implementation, we do not send the state of operators
to the remote location. This approach works well for all stateless
operators such as filter, map, and union as well as
for operators that process windows of tuples without keeping state
between windows (e.g., windowed joins and some types of
aggregates). For these latter operators, a movement disrupts the
computation over only one window. For more stateful operators, we
should extend the movement protocol to include freezing the state of
the original query, transferring the query with that state, and
re-starting the query from the state at the new location. We plan to
explore the movements of stateful operators in future work.
6 Conclusion
In this paper, we presented a mechanism for load management in loosely
coupled, federated distributed systems. The mechanism, called the
bounded-price mechanism, is based on pairwise contracts negotiated
offline between participants. These contracts specify a bounded range
of unit prices for load transfers between partners. At runtime,
participants use these contracts to transfer excess load at a price
within the pre-defined range.
Small price-ranges are sufficient for the mechanism to produce
acceptable allocations in an underloaded network of uniform nodes and
contracts, and produce allocations close to acceptable in other
cases. Compared to previous approaches, this mechanism gives
participants control and privacy in their interactions with others.
Contracts allow participants not only to constrain prices but also
practice price discrimination and service customization. The approach
also has a low runtime overhead.
Participants have flexibility in choosing contract prices. We show
that even randomly chosen prices from a wide range achieve allocations
close to acceptable. We suggest, however, that participants first
negotiate relatively high fixed-price contracts to maximize their
chances of shedding excess load while minimizing runtime overhead and
only later negotiate additional contracts with lower
prices. Additionally, if participants notice that they often stand
between overloaded and underloaded partners, they should re-negotiate
some of their contracts to cover a small price-range and make a small
profit by forwarding load from their overloaded to their underloaded
partners.
Although the load management mechanism introduced in this paper is
motivated by federated distributed stream processing, it also applies
to other federated systems such as Web services, computational grids,
overlay-based computing platforms, and peer-to-peer systems.
In this paper, we did not address high availability. Because each
participant owns multiple machines, participant failures are rare. We
envision, however, that if the participant running the tasks fails, it
is up to the original nodes to recover the failed tasks. If the
original participant fails, though, the partner continues processing
the tasks until the original participant recovers. Contracts could
also specify availability clauses. We plan to investigate high
availability further in future work.
Acknowledgments
We thank Rahul Sami for many invaluable suggestions. We thank Jaeyeon
Jung and Dave Andersen from MIT, and Noah Case from Syptec, for
providing us the network connection traces.
References
- [1]
-
D. J. Abadi, D. Carney, U. Çetintemel, M. Cherniack, C. Convey, S. Lee,
M. Stonebraker, N. Tatbul, and S. Zdonik.
Aurora: A new model and architecture for data stream management.
The VLDB Journal: The Int. Journal on Very Large Data Bases,
Sept. 2003.
- [2]
-
B. Babcock, S. Babu, M. Datar, R. Motwani, and J. Widom.
Models and issues in data stream systems.
In Proc. of 2002 ACM Symposium on Principles of Database
Systems, June 2002.
- [3]
-
P. Bhoj, S. Singhal, and S. Chutani.
SLA management in federated environments.
Technical Report HPL-98-203, Hewlett-Packard Company, 1998.
- [4]
-
R. Buuya, H. Stockinger, J. Giddy, and D. Abramson.
Economic models for management of resources in peer-to-peer and grid
computing.
In Proc. of SPIE Int. Symposium on The Convergence of
Information Technologies and Communications (ITCom 2001), Aug. 2001.
- [5]
-
S. Chandrasekaran, A. Deshpande, M. Franklin, and J. Hellerstein.
TelegraphCQ: Continuous dataflow processing for an uncertain world.
In Proc. of the First Biennial Conference on Innovative Data
Systems Research (CIDR'03), Jan. 2003.
- [6]
-
J. Chen, D. J. DeWitt, F. Tian, and Y. Wang.
NiagaraCQ: A scalable continuous query system for Internet
databases.
In Proc. of the 2000 ACM SIGMOD Int. Conference on Management of
Data, May 2000.
- [7]
-
M. Cherniack, H. Balakrishnan, M. Balazinska, D. Carney, U. Çetintemel,
Y. Xing, and S. Zdonik.
Scalable distributed stream processing.
In Proc. of the First Biennial Conference on Innovative Data
Systems Research (CIDR'03), Jan. 2003.
- [8]
-
B. Chun, Y. Fu, and A. Vahdat.
Bootstrapping a distributed computational economy with peer-to-peer
bartering.
In Proc. of the Workshop on Economics of Peer-to-Peer Systems,
June 2003.
- [9]
-
B. N. Chun.
Market-Based Cluster Resource Management.
PhD thesis, University of California at Berkeley, 2001.
- [10]
-
D. L. Eager, E. D. Lazowska, and J. Zahorjan.
Adaptive load sharing in homogeneous distributed systems.
IEEE Transactions on Software Engineering, SE-12(5):662-675,
May 1986.
- [11]
-
C. Estan, S. Savage, and G. Varghese.
Automatically inferring patterns of resource consumption in network
traffic.
In Proc. of the ACM SIGCOMM 2003 Conference, Aug. 2003.
- [12]
-
J. Feigenbaum, C. Papadimitriou, R. Sami, and S. Shenker.
A BGP-based mechanism for lowest-cost routing.
In Proc. of the 21st Symposium on Principles of Distributed
Computing, July 2002.
- [13]
-
J. Feigenbaum, C. Papadimitriou, and S. Shenker.
Sharing the cost of multicast transmissions.
Journal of Computer and System Sciences, 63:21-41, 2001.
- [14]
-
J. Feigenbaum, C. Papadimitriou, and S. Shenker.
Distributed algorithmic mechanism design: Recent results and future
directions.
In Proc. of the 6th Int. Workshop on Discrete Algorithms and
Methods for Mobile Computing and Communications, Sept. 2002.
- [15]
-
D. Ferguson, C. Nikolaou, J. Sairamesh, and Y. Yemini.
Economic models for allocating resources in computer systems.
In S. H. Clearwater, editor, Market based Control of Distributed
Systems. World Scientist, Jan. 1996.
- [16]
-
I. T. Foster and C. Kesselman.
Computational grids.
In Proc. of the Vector and Parallel Processing (VECPAR), June
2001.
- [17]
-
Y. Fu, J. Chase, B. Chun, S. Schwab, and A. Vahdat.
SHARP: An architecture for secure resource peering.
In 19th ACM Symposium on Operating Systems Principles, Oct.
2003.
- [18]
-
Y. Fu and A. Vahdat.
Service level agreement based distributed resource allocation for
streaming hosting systems.
In Proc. of 7th Int. Workshop on Web Content Caching and
Distribution, Aug. 2002.
- [19]
-
R. Gallager.
A minimum delay routing algorithm using distributed computation.
IEEE Transactions on Communication, COM-25(1), Jan. 1977.
- [20]
-
M. Jackson.
Mechanism theory.
Forthcoming in Encyclopedia of Life Support Stystems, 2000.
- [21]
-
A. Keller and H. Ludwig.
The WSLA framework: Specifying and monitoring service level
agreements for Web services.
Technical Report RC22456, IBM Corporation, May 2002.
- [22]
-
J. F. Kurose.
A microeconomic approach to optimal resource allocation in
distributed computer systems.
IEEE Transactions on Computers, 38(5):705-717, 1989.
- [23]
-
K. Lai, M. Feldman, I. Stoica, and J. Chuang.
Incentives for cooperation in peer-to-peer networks.
In Proc. of the Workshop on Economics of Peer-to-Peer Systems,
June 2003.
- [24]
-
W. Lehr and L. W. McKnight.
Show me the money: Contracts and agents in service level agreement
markets.
http://itc.mit.edu/itel/docs/2002/show_me_the_money.pdf, 2002.
- [25]
-
T. W. Malone, R. E. Fikes, K. R. Grant, and M. T. Howard.
Enterprise: A market-like task scheduler for distributed computing
environments.
The Ecology of Computation, 1988.
- [26]
-
Mesquite Software, Inc.
CSIM 18 user guide.
http://www.mesquite.com.
- [27]
-
M. S. Miller and K. E. Drexler.
Markets and computation: Agoric open systems.
In B. Huberman, editor, The Ecology of Computation. Science &
Technology, 1988.
- [28]
-
C. Ng, D. C. Parkes, and M. Seltzer.
Strategyproof computing: Systems infrastructures for self-interested
parties.
In Proc. of the Workshop on Economics of Peer-to-Peer Systems,
June 2003.
- [29]
-
C. Ng, D. C. Parkes, and M. Seltzer.
Virtual worlds: Fast and strategyproof auctions for dynamic resource
allocation.
http://www.eecs.harvard.edu/~parkes/pubs/virtual.pdf, June
2003.
- [30]
-
T.-W. J. Ngan, D. S. Wallach, and P. Druschel.
Enforcing fair sharing of peer-to-peer resources.
In Proc. of the 2nd Int. Workshop on Peer-to-Peer Systems (IPTPS
'03), Feb. 2003.
- [31]
-
N. Nisan and A. Ronen.
Computationally feasible VCG mechanisms.
In Proc. of the Second ACM Conference on Electronic Commerce
(EC00), Oct. 2000.
- [32]
-
N. Nisan and A. Ronen.
Algorithmic mechanism design.
Games and Economic Behavior, 35, 2001.
- [33]
-
D. Parkes.
Iterative Combinatorial Auctions: Achieving Economic and
Computational Efficiency (Chapter 2).
PhD thesis, Department of Computer and Information Science,
University of Pennsylvania, 2001.
- [34]
-
D. Parkes.
Price-based information certificates for minimal-revelation
combinatorial auctions.
Agent Mediated Electronic Commerce IV, LNAI 2531:103-122,
2002.
- [35]
-
L. Peterson, T. Anderson, D. Culler, and T. Roscoe.
A blueprint for introducing disruptive technology into the
Internet.
In Proc. of the First Workshop on Hot Topics in Networks, Oct.
2002.
- [36]
-
M. Roesch.
Snort: Lightweight intrusion detection for networks.
In Proc. of the 13th Conference on Systems Administration
(LISA-99), Nov. 1999.
- [37]
-
A. Sahai, A. Durante, and V. Machiraju.
Towards automated SLA management for Web services.
Technical Report HPL-2001-310R1, Hewlett-Packard Company, July 2001.
- [38]
-
A. Sahai, S. Graupner, V. Machiraju, and A. van Moorsel.
Specifying and monitoring guarantees in commercial grids through
SLA.
Technical Report HPL-2003-324, Hewlett-Packard Company, Nov. 2002.
- [39]
-
T. W. Sandholm.
An implementation of the contract net protocol based on marginal cost
calculations.
In Proc. of the 12th Int. Workshop on Distributed Artificial
Intelligence, pages 295-308, 1993.
- [40]
-
T. W. Sandholm.
Contract types for satisficing task allocation: I theoretical
results.
In AAAI Spring Symposium Series: Satisficing Models, Mar.
1998.
- [41]
-
M. A. Shah, J. M. Hellerstein, S. Chandrasekaran, and M. J. Franklin.
Flux: An adaptive partitioning operator for continuous query systems.
In Proc. of the 19th Int. Conference on Data Engineering (ICDE
2003), Mar. 2003.
- [42]
-
I. Stoica, R. Morris, D. Karger, M. F. Kaashoek, and H. Balakrishnan.
Chord: A scalable peer-to-peer lookup service for Internet
applications.
In Proc. of the ACM SIGCOMM 2001 Conference, pages 149-160,
Aug. 2001.
- [43]
-
M. Stonebraker, P. M. Aoki, W. Litwin, A. Pfeffer, A. Sah, J. Sidell,
C. Staelin, and A. Yu.
Mariposa: a wide-area distributed database system.
The VLDB Journal: The Int. Journal on Very Large Data Bases, 5,
Jan. 1996.
- [44]
-
The Condor® Project.
Condor high throughput computing.
http://www.cs.wisc.edu/condor/.
- [45]
-
V. Vishnumurthy, S. Chandrakumar, and E. G. Sirer.
KARMA: A secure economic framework for peer-to-peer resource
sharing.
In Proc. of the Workshop on Economics of Peer-to-Peer Systems,
June 2003.
- [46]
-
C. Waldspurger, T. Hogg, B. Huberman, J. Kephart, and W. Stornetta.
Spawn: A distributed computational economy.
IEEE Transactions on Software Engineering, SE-18(2):103-117,
1992.
Footnotes:
1This material is based upon work supported by the
National Science Foundation under Grant No. 0205445. Any opinions,
findings, and conclusions or recommendations expressed in this
material are those of the author(s) and do not necessarily reflect the
views of the National Science Foundation.
2Non-payment models, such as bartering, are possible
too. See Section 2 for details.
3In a combinatorial
auction, multiple items are sold concurrently. For each bidder, each
subset of these items represents a different value.
4We exclude the task selection problem from
the strategy space.
5The semantics
of many stream processing applications are such that occasional tuple
drops are acceptable [2].
6Each result is the average
of nine simulations.
File translated from
TEX
by
TTH,
version 3.40.
On 9 Feb 2004, 12:17.
|

