FAST '05 Paper
[FAST '05 Technical Program]



Zodiac: Efficient Impact Analysis for Storage Area Networks
Aameek Singh - Georgia Institute of Technology
Madhukar Korupolu - IBM Almaden Research Center
Kaladhar Voruganti - IBM Almaden Research Center
Currently, the fields of impact analysis and policy based management are two important storage
management topics that are not being treated in an integrated manner. Policy-based storage
management is being adopted by most storage vendors because it lets system administrators specify
high level policies and moves the complexity of enforcing these policies to the underlying
management software. Similarly, proactive impact analysis is becoming an important aspect of storage
management because system administrators want to assess the impact of making a change before
actually making it. Impact analysis is increasingly becoming a complex task when one is
dealing with a large number of devices and workloads. Adding the policy dimension to impact
analysis (that is, what policies are being violated due to a particular action) makes this problem
even more complex.
In this paper we describe a new framework and a set of optimization techniques that
combine the fields of impact analysis and policy management. In this framework system administrators
define policies for performance, interoperability, security, availability, and then proactively
assess the impact of desired changes on both the system observables and policies. Additionally, the
proposed optimizations help to reduce the amount of data and the number of policies that
need to be evaluated. This improves the response time of impact analysis operations.
Finally, we also propose a new policy classification scheme that classifies policies based on the
algorithms that can be used to optimize their evaluation. Such a classification is useful in order
to efficiently evaluate user-defined policies. We present an experimental study that
quantitatively analyzes the framework and algorithms on real life storage area network policies. The
algorithms presented in this paper can be leveraged by existing impact analysis and policy engine
tools.
The size and scale of the storage infrastructure of most organizations is increasing at a very rapid
rate. Organizations are digitizing and persistently storing more types of data, and are also keeping
old data longer, for compliance and business intelligence mining purposes. The number of system
administrators required to manage storage also increases as a function of the growth in storage
because there is a limit to the amount of storage that can be managed by a single administrator. This
limit is due to the number of complex tasks that a system administrator has to perform such as
change analysis, provisioning, performance bottleneck analysis, capacity planning, disaster recovery
planning and security analysis.
The focus of this paper is on one of these important problems namely change analysis. This
paper provides a framework and a set of algorithms that help system administrators to proactively
assess the impact of making changes in a storage area network (SAN) before making the actual change.
Currently, administrators perform impact analysis manually, based on their past
experience and rules of thumbs (best practices). For example, when a new host is added, the
administrators have to make sure that Windows and Linux hosts are not put into the same zone or
while adding a new workload, they have to ensure that the intermediate switches do not get
saturated.
Manually analyzing the impact of a particular change does not scale well as the size of the SAN
infrastructure increases with respect to the number of devices, best practices policies, and number
of applications. Thus, deployment of new applications, hosts and storage controllers takes in the
order of days or weeks because system administrators deploy the system and then reactively try to
correct the problems associated with the deployment. Typically change management tools have
been very reactive in their scope in that they keep snapshots of the previous state of the system,
and the administrators either revert to or compare the current state with a previous state after
encountering a problem.
Additionally, administrators do not have a way of assessing the impact of their proposed change
with respect to a future state of the system. For example, a system administrator could potentially
allocate increased bandwidth to an application by taking only the current load into account. However,
this could conflict with other scheduled jobs or known trends in workload surges that will increase
the load on the system in the future. Thus, it is important for system administrators to assess the
impact of their action not just with respect to the current state of the system but also with
respect to future events.
In order to address the above described problems, we present the Zodiac framework. The Zodiac
framework enables system administrators to proactively assess the impact of their actions on a
variety of system parameters like resource utilizations and existing system policies, before making
those changes. Proactive change management analysis is an important problem and is currently
receiving the deserved attention [26,21,23,29]. Through Zodiac,
we make the following contributions:
1. Integration with Policy based Management: The key aspect of our analysis framework is
that it is tightly integrated with policy based storage management. Currently, policy-based
management is being incorporated into most vendor's storage management solutions. Best-practices,
service class goals, interoperability constraints, are specified as policies in the system.
Thus, in essence we are combining the areas of impact analysis and policy based-management. Zodiac
allows administrators to specify their rules of thumb or best practices with respect to
interoperability, performance, availability, security as policies. It then assesses the
impact of user actions by checking which of these policies are being violated or triggered. Zodiac also assesses
the impact of creating new policies.
2. Scalability and Efficiency: Most system administrators want to assess the impact of
their changes in real-time. A quick feedback on a proposed change encourages a system administrator
to try out many alternatives. The three major components that contribute towards the execution time
of impact analysis processing are: a) number of policies b) size of the storage infra-structure c)
analysis time window (that is assess the impact of an action for a time window of a day, a week or a
month). An impact analysis engine should be able to scale upto big SANs with 1000 hosts (found in many of
today's data centers) and a few hundred policies. In this paper, we provide algorithms and data
structures that help to reduce the amount
of SAN data that is examined during impact analysis, the number of policies that need to be
evaluated, and a framework for performing temporal impact analysis.
3. Classification Framework: One of the interesting result of the algorithm design effort
in Zodiac is that we have designed a new method for classifying SAN policies based on the
optimization techniques they employ. This, in turn, can also be used by general SAN policy
evaluation engines to optimize their evaluation mechanisms. During policy specification period,
policy designers can specify the policy type (as per this classification) as a hint to the policy
engine to optimize its evaluation.
The rest of the paper is organized as follows. Section-2 provides the necessary
background with respect to policy definitions, and SAN operations. Related work is presented in
Section-3. The overview of our architecture is presented in Section-4
followed by the details of our implementation in Section-5. In
Section-6, we discuss three important optimization algorithms that help speed up
the overall analysis process. The experimental framework and the results evaluating these
optimizations are presented in Section-7. We discuss related optimizations in
Section-8. Finally, we conclude in Section-9.
2 Background
This section presents the necessary background material for this paper. Section-2.1
contains a discussion on the type of SAN policies considered in this paper. Section-2.2
provides the details of the storage resource models and Section-2.3 presents a list of
what-if operations that one can perform. In summary, one can define various policies on the SAN resources
and using our framework, analyze the impact of certain operations on both the SAN and its associated policies.
2.1 Policy Background
The term policy is often used by different people in different contexts to mean different things.
For example, the terms best practices, rule of thumbs, constraints, threshold violations, goals, rules
and service classes have been referred to as policies by different people. Currently, most standardization
bodies such as IETF, DMTF, and SNIA refer to policy as a 4-field tuple where the fields correspond to an
if condition, a then clause, a priority or business value of the policy and
a scope that decides when the policy should be executed. The then clause portion can generate indications, or
trigger the execution of other operation (action policies), or it can simply be informative in nature (write a message to the log).
[1] describes the various SAN policies found relevant by domain experts.
In this paper, within the storage area network (SAN) domain, we deal with the following types of policies:
- Interoperability: These policies describe what devices are interoperable (or not) with
each other.
- Performance: These policies are violation policies that notify users if the performance
of their applications (throughput, IOPs or latency) violate certain threshold values.
- Capacity: These policies notify users if they are crossing a percentage (threshold) of
the storage space has been allotted to them.
- Security and Access Control: Zoning and LUN masking policies are the most common SAN
access control policies. Zoning determines a set of ports that can transfer data to each other in
the set. Similarly, LUN masking controls host access (via its ports) to storage volumes at the storage
controller.
- Availability: These policies control the number of redundant paths from the host to the
storage array.
- Backup/Recovery: These policies specify the recovery time recovery point, recovery
distance, copy size and copy frequency to facilitate continuous copy and
point-in-time copy solutions.
2.2 Storage Resource Model
In order to perform impact analysis, storage resource models are used to model the underlying
storage infrastructure. A storage resource model consists of a schema corresponding to various entities like hosts, host bus adapters (HBAs), switches, controllers, the entity attributes (e.g. vendor, firmware level), container relationships between the entities (HBA is
contained with a host), and connectivity between the entities (fabric design). These entities and
attributes are used during the definition of a policy as part of the if-condition and the then clause. For a specific policy, the entities and the attributes that it uses are called its
dependent entities and dependent attributes respectively. The SNIA
SMI-S [28] model presents a general framework for naming and modeling storage resources.
In addition to the schema, a storage resource model also captures the behavioral aspects of the
entities. The behavioral aspects, called metrics, represent how a resource behaves under
different workload and configuration conditions. The behavioral models are either analytically specified by
a domain expert [30], or deduced by observing a live system [3] or a
combination of both.
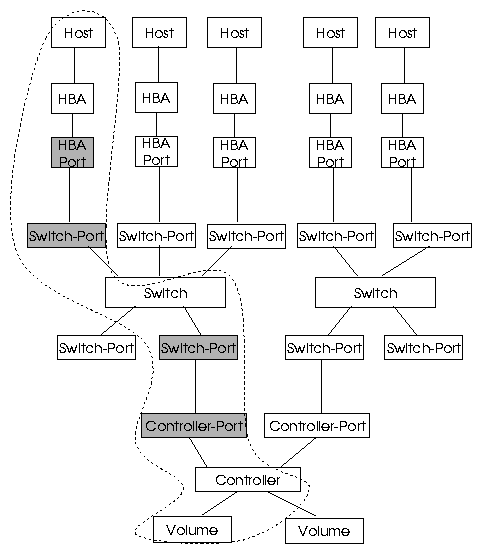
Figure-1 shows the basic SAN resource model that we consider in this paper. Our
resource model consists of hosts, HBAs, ports, switches, storage controllers, zones, and volume
entities, and host to HBA, port to HBA, port to zone containment relationships
and port to port connection relationships. In addition, there exists a parent entity class
called device , which contains all the SAN devices. The device entity class can be used to
define global policies like all devices should have unique WWNs. Please note that our framework
and techniques are not limited to this model only but instead can also be used in more generalized
storage infrastructure models.
Figure 1:
SAN Resource Model. A single SAN path is highlighted. Shaded ports represent zone containment.
|
2.3 SAN Operations:
Using Zodiac, the following types of operations can be analyzed for impact.
- Addition/Deletion of Physical Resources like hosts, switches, HBAs, and storage arrays.
- Addition/Deletion of Logical Resources like volumes and zones.
- Access control operations by adding or removing ports to zones or similar LUN masking operations.
- Addition/Deletion of Workloads. Also, the requirements (throughput, latency) of a workload can be modified. We
represent a workload as a set of flows. A flow can be thought of a data path (Figure-1)
between a host and a storage controller. A flow starts at a host port, and goes through intermediate
switch ports and ends at a storage controller port.
- Addition/Deletion of Policies. Please note that we do not focus on conflict detection analysis within policies in this paper.
3 Related Work
With the growth in amount of storage resources, there has been a strong initiative for automating
various management tasks and making systems self-sufficient [2,4,18,10]. Most of this research has focused on various planning tasks - capacity planning,
including Minerva [2], Hippodrome [4], Ergastulum [5]; fabric
planning like Appia [32,33], and disaster recovery
planning [22,23].
Impact analysis, also referred to as ``what-if" or change-management analysis, is another closely
related management task. Some of the planning work described above can actually be used for such analysis. For example,
Ergastulum [5] can be used to analyze storage subsystems and Keeton et al's [23]
helps in analyzing disaster recovery scenarios. Another recent work by Thereska et al. [29] provides
what-if analysis using the Self-* framework [18]. There also exist tools and simulator
like [21,34] that provide impact analysis for storage controllers.
Most of the what-if approaches utilize device and behavioral models for resources. Significant amount of
research has been done both in developing such models [30,3,27,31,34] and using
those models [14,11,25,8].
Zodiac is different from existing impact analysis work, due to its close integration with policy based
management. Using Zodiac, an administrator can analyze the impact of operations not only on system resources
but also on system policies. In addition, the analysis accounts for all subsequent actions triggered
by policy executions. As we describe later, efficient analysis of policies is non-trivial and critical
for overall performance.
The Onaro SANscreen product [26] provides a similar predictive change
management functionality. However, from the scarce amount of published information, we believe that they
only analyze the impact for a small set of policies (mainly security) and do not consider any triggered
policy actions. We believe this to be an important shortcoming, since typically administrators would
specify policy actions in order to correct erroneous events and would be most interested in analyzing the
impact of those triggered actions. The EMC SAN Advisor [16] tool provides support for policy
evaluations, but is not an impact analysis tool. Secondly, it pre-packages its policies and does not
allow specification of custom policies.
In the policies domain, there has been work in the areas of policy
specification [12,7], conflict detection [17]
and resource management [24]. The SNIA-SMI [28] is also developing a policy
specification model for SANs. To the best of our knowledge, there does not exist any SAN impact
analysis framework for policies. [1] proposed a policy based validation framework,
which is typically used as a periodic configuration checker and is not suitable for
interactive impact analysis.
4 Architecture Overview
In this section, we provide an overview of the Zodiac architecture and its interaction with other SAN modules.
4.1 Zodiac: Big Picture
The goal of the impact analysis engine, like Zodiac, is to predict the state and behavior of the SAN once a
desired operation is performed. In order to evaluate the new state, the engine needs to interact with
various SAN modules to get the relevant information, like device attributes, policies. The overall
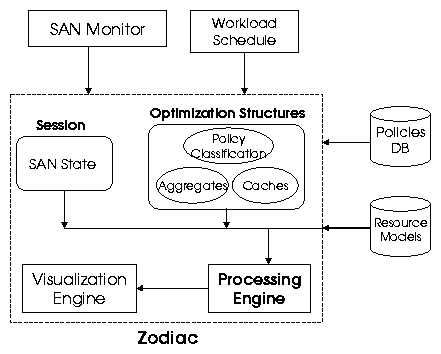
picture of such an eco-system is shown in Figure-2. In this eco-system, Zodiac interacts with the following modules:
- SAN Monitor: The foremost input requirement is the state of the SAN,
which is obtained from a SAN Monitor like [15,19,20,6]. It consists of the physical
configuration (fabric design), resource attributes (HBA vendor, number of HBAs in a host)
and logical information like Zoning/LUN-Masking.
- Workload Schedule: In order to predict the behavior of the SAN, Zodiac also needs to know the schedule
of the workload. For example, if a backup job is scheduled for 3 AM, then the engine needs to account
for the additional traffic generated due to the backup during that duration.
- Policy Database: A unique characteristic of the Zodiac impact analysis engine is its
integration with policy based management. The policies are specified in a high level specification language
like Ponder [12] or XML [1] and stored in a policy database.
- Resource Models: As described earlier, Zodiac uses a model based approach to evaluate the
behavior of SAN resources. For this, we require a resource models database that provides such
behavioral models. There has been significant work in the area of modeling and simulation of SAN
resources [30,3,27,31,11,25,8,9,34] and we
leverage that. Note that the design of Zodiac is independent of the resource models and can work
with any approach.
Given these modules, Zodiac takes as input the operation that the administrator wants to
perform and the time at which the impact needs to be measured (immediate or after n hours)
and initiates the analysis.
4.2 Zodiac: Internal Design
Internally, Zodiac engine is composed of the following primary components:
- SAN-State: In Zodiac, the impact analysis occurs in a session, during which an
administrator can analyze the impact of multiple operations incrementally. So, a first operation could
be - what happens if I add two hosts? After the engine evaluates the impact, an administrator
can perform an incremental operation - what if I add another two hosts? The SAN state
component maintains the intermediate states of the SAN, so that such incremental operations can be
analyzed. When an analysis session is initialized, the SAN state is populated by the current snapshot
of the SAN, obtained from the SAN Monitor.
- Optimization Structures: As mentioned earlier, for efficient policy
evaluation, Zodiac maintains intelligent data structures that optimize the overall
evaluation. These three primary structures (caches, policy classes and aggregates) are explained
in detail in Section-6.
- Processing Engine: The processing engine is responsible for efficiently evaluating the
impact of operations using the SAN state and the rest of the internal data structures. It is the main
work horse of Zodiac.
- Visualization Engine: Another important component of Zodiac is its visualization engine. The
visualization engine primarily provide two kinds of output. First, it can provide an overall picture of
the SAN, with various entity metrics and can highlight interesting entities, e.g. the ones that violated
certain policies. Secondly, with the incorporation of temporal analysis, an administrator can plot
interesting metrics with time.
5 Zodiac: System Details
In this section, we provide the details about the internal data structures
being used by Zodiac to represent SANs (Section-5.1) and how the
policy evaluation framework uses
these data structures (Section-5.2).
In Section-5.3,
we describe the inadequacy of the current evaluation approach before proposing various optimizations in the
next section.
5.1 SAN Representation
For efficient impact analysis, it is critical that SAN is represented in an optimal form. This is
because all policies and resource metric computations would obtain required data through this SAN
data structure. In Zodiac,
the SAN is represented as a graph with entities as nodes and network links or containment
relationships (HBA is contained within a host) as edges. A sample SAN as a graph is shown
in Figure-1. A single SAN ``path" has been highlighted. Note that it is possible
to have more than one switch in the path.
Each entity in the graph has a number of attribute-value pairs, e.g. the host entity has attributes like
vendor, model and OS. In addition, each entity contains pointers to its immediate neighbors (Host has a pointer
to its HBA, which has a pointer to its HBA-Port and so on). This immediate neighbor maintenance and extensive use of
pointers with zero duplication of data allows this graph to be maintained in memory even for huge SANs (1000 hosts).
There are two possible alternatives to this kind of immediate-neighbor representation of the SAN. We
discuss the alternatives and justify our choice below:
- Alternative-Paths: Assume a best practices policy requiring a Vendor-A host to be only connected to Vendor-S
controller. Its evaluation would require a traversal of the graph starting at the host and going through all
paths to all connected controllers. In fact many policies actually require traversals along
``paths" in the graph[1]. This could indicate storing the SAN as a collection of paths and iterating
over the relevant paths for each policy evaluation, preventing costly traversals over the graph.
However, the number of paths in a big SAN could be enormous, and thus, prohibitive to maintain the path information
in-memory. Also, the number of new paths created with an addition of a
single entity (e.g. a switch) would be exponential, thus making the design unscalable.
- Alternative-SC: Even without paths, it is possible to ``short-circuit" the traversals by
keeping information about
entities further into the graph. For example, a host could also keep pointers to all connected storage.
While this scheme does work for some policies, many interoperability policies, that filter paths of
the graph based on some properties
of an intermediate entity, cannot be evaluated. For example, a policy that requires a Vendor-A host,
connected to a Vendor-W switch, to be only connected to Vendor-S storage, cannot be evaluated
efficiently using such a representation, since it is still required to traverse to the intermediate
entity and filter based on it. However, this idea is useful and we actually use a modified version
of this in our optimization schemes described later.
5.2 Policy Evaluation
In current policy evaluation engines, policies are specified in a high level specification language
like Ponder [12], XML [1]. The engine converts the policy into executable
code that can evaluate the policy when triggered. This uses an underlying data layer, e.g. based
on SMI-S, that obtains the required data for evaluation. It is this automatic code generation, that
needs to be heavily optimized for efficient impact analysis and we discuss various optimizations in
Section-6.
In Zodiac, the data is obtained through our SAN data structure. For evaluating a
policy like all Vendor-A hosts should be connected to Vendor-S
controllers, a graph traversal is required (obtaining storage controllers connected to Vendor-A hosts).
In order to do such traversals, each entity in the graph supports an API
that is used to get to any other connected entity in the graph (by doing recursive calls to
immediate neighbors). For example, hosts support a
getController()
function that returns all
connected storage controllers. The functions are implemented by looking up immediate neighbors (HBAs),
calling their respective
getController()
functions, aggregating the results and removing duplicates.
The neighbors would recursively do the same with their immediate neighbors until the call reaches the
desired entity (storage controller). Similarly for getting all connected edge switches, core switches or volumes.
This API is also useful for our caching optimization. It caches the results of these function calls at
all intermediate nodes for reuse in later policy evaluations.
However, even this API suffers from the limitation of the Alternative-SC scheme presented above.
That is, how to obtain controllers connected only through a particular vendor switch. To facilitate this,
the entity API allows for passing of filters that can be applied at intermediate nodes in the path. For
our example, the filter would be Switch.Vendor=``W". Now, the host would call the HBA's
getController()
function with the filter Switch.Vendor=``W". When this call recursively reaches the switch, it
would check if it satisfies the filter and only the switches that do, continue the recursion to
their neighbors. Those that do not satisfy the filter return null.
The use of filters prevents unnecessary traversals on the paths that do not yield any results (e.g. paths to the
controllers connected through switches from other vendors). The filters support many comparison operations like
=,!= ,> ,< , belongs, and logical OR, AND and NOT on filters are also supported.
The caching scheme incorporates filters as well (Section-6.2). The Alternative-SC presented above, can not
use this filter based scheme since the possible number of filters can be enormous and thus always storing
information in-memory for each such filter would be infeasible.
Notice that not all filters provide traversal optimizations. The filters that are at the ``edge"
of a path do not help. For example,
a best practices policy - if a Vendor-A host connected to a Vendor-W switch accesses storage
from a Vendor-S controller, then the controller should have a firmware level > x.
In this case, the policy requires getting controllers with the filter Switch.Vendor=``W" AND
Controller.Vendor=``S". While the first term helps reduce the number of paths traversed, the second
term does not - we still have to check every controller connected through
the appropriate switches. Therefore, we prefer not to apply the filters at the edge, instead obtaining
all edge entities (controllers in this case) and then checking for all conditions ( Vendor and FirmwareLevel ).
This helps in bringing more useful data into the entity caches.
It is also important to mention that the traversal of the graph can also be done only for logical connections
(due to zoning). This is facilitated by providing equivalent API functions for traversing links with end-points
in particular zone, e.g.
getControllerLogical(Z)
obtains all connected controllers in Zone Z, i.e. all
controllers reachable through a path containing ports (HBA ports, switch ports, controller ports) in
zone Z.
Given the above framework, we next discuss why the current policy evaluation approach is inefficient for
impact analysis.
5.3 Impact Analysis: Inadequacies of Current Approach
During impact analysis, a SAN operation can trigger multiple policies to be evaluated. For example, a host being
added into the SAN would require evaluation of intrinsic host policies (policies on basic attributes of the
host - all hosts should be from a single vendor), various host interoperability policies with other
connected devices, zoning policies, and so on. With the popular policy-based autonomic computing initiative, it is
highly likely that the number of policies in a SAN would be very large. So it is imperative that only the
relevant set of policies are evaluated. For example, for the host-addition case, a switch and controller
interoperability policy should not be evaluated.
The current policy evaluation engines [1] use a coarse classification of scopes.
In such a scheme, each policy is designated a Scope to denote the class of entities, it is relevant to.
In addition, it is possible to sub-scope the policy as intra-entity - evaluation on attributes of
a single entity class or inter-entity - evaluation on attributes of more than one
entity class [1]. The motivation for such classification is to allow administrators,
to do a policy check only for a select class of entities and policies in the SAN. Unfortunately, this
form of classification is not efficient for impact-analysis due to the following reasons:
- Lack of granularity: Consider the policy which requires a Vendor-A host to
be connected only to Vendor-S storage controller. Naively, such a policy would be classified into the Host
scope and the Storage scope. Thus, whenever a new host is added to the SAN, it will be evaluated and
similarly, when a controller is added. However, consider the addition of a new link between an edge and
a core switch. Such a link could cause hosts to be connected to new storage controllers, and thus the
policy would still need to be evaluated and so, the policy also needs to be added to the Switch scope.
With only scope as the classification criteria, any switch related event would trigger this policy.
It is possible to further sub-scope the policy to be an inter-entity. However, it still
will be clubbed with other switch inter-entity policies, which will cause un-necessary evaluations.
- Failure to identify relevant SAN region: The current scoping mechanism fails to identify the
region of the SAN that needs to be traversed for policy evaluation. Consider the two policies:
(a) All Vendor-A hosts should be connected to Vendor-S storage, and (b) All hosts should
have atleast one and atmost four disjoint paths to controllers. Both the policies would have identical
scopes (host, controller and switch) and sub-scopes (inter-entity). Now, when a switch-controller link
is added to the SAN, evaluation of (a) should traverse only the newly created paths - ensure that
all new host-storage connections satisfy the policy; there is no need to traverse a path that has
already been found to satisfy that policy. However, the same is not true for (b). Its evaluation would
require traversing many old paths. The current scoping mechanism fails to identify policies of type (a)
and would end up evaluating many old paths in order to provide a correct and general solution.
The current policy evaluation engines also fail to exploit the locality of data across various policies.
For example, two distinct policies might require obtaining the storage controllers connected to the same
host. In such a scenario, it is best to obtain the results for one and cache them to use it for the other.
To the best of our knowledge, the current policy engines do not provide such caching schemes and rely on
the underlying SMI-S data layer [1] to do this caching (which could still require
evaluating expensive join operations). This is, in part, due to the low number of policies in current
SANs and the fact that currently, the policy checking process is primarily a non-real-time, scheduled task
with periodic reporting (typically daily or weekly reporting periods). As we show in Section-7,
a caching scheme could have drastic performance benefits and help in interactive real-time analysis.
Such an efficiency is critical especially in the presence of action policies. Such policies when triggered
initiate automatic operations on the SAN (``then" clause of the policy). These are typically
designed as compensating actions for certain events and can do rezoning, introduce new workloads, change
current workload characteristics, schedule workloads and more. For example, a policy for a write-only
workload like if Controller-A utilization increases beyond 95%, write the rest of the data on Controller-B.
Thus, when the policy is triggered, a new flow is created between the host writing the data and
Controller-B, and policies related to that event need to be checked. The action might also do rezoning to put Controller-B
ports in the same zone as the host and so, all zoning related policies would end up being evaluated. Overall,
such a chain of events can lead to multiple executions of many policies. The caching scheme, combined with the
policy classification, significantly helps in these scenarios.
6 Zodiac Impact Analysis: Optimizations
In this section, we present various optimizations in the Zodiac architecture that are critical for the scalability
and efficiency of impact analysis. Zodiac uses optimizations along three dimensions.
- Relevant Evaluation: Finding relevant policies and relevant regions of the SAN affected by the
operation. This is accomplished using policy classification and is described in Section-6.1.
- Commonality of Data Accessed: Exploiting data locality across policies or across evaluation for
different entity instances. This is achieved by using caching, described in Section-6.2.
- Aggregation: Efficient evaluation of certain classes of policies by keeping certain
aggregate data structures. This scheme is described in Section-6.3.
All three optimizations are independent of each other and can be used individually. However, as we show later
in our results, the best performance is achieved by the combination of all three optimizations.
6.1 Policy Classification
The first policy evaluation optimization in Zodiac is policy classification. Policy classification helps in identifying
the relevant regions of the SAN and the relevant policies, whenever an operation is performed. In order to
identify the relevant SAN region affected by an operation, we classify the policies into four categories described
below. Only the ``if" condition of the policy is used for classification. Also, each policy class has
a set of operations, which are the
ones that can trigger the policy. This mapping of operations to policies can
be made easily due to our classification scheme and is used to find the relevant set of policies.
1. Entity-Class (EC) Policies: These policies are defined only on the instances of a single entity class.
For example, all HBAs should be from the same vendor, and all Vendor-W switches must have a firmware
level > x. Such policies do not require any graph traversals, rather a scan of the list of instances of the
entity class. The relevant operations for this class of policies are addition/deletion of an entity-instance or
modification of a ``dependent" attribute of an instance like changing the firmware level of a switch (for our second
example above). Additionally, EC policies can be subdivided into two types:
- -
- Individual (EC-Ind) Policy: A policy that holds on every instance of the entity class. For example,
all switches must be from Vendor-W. This class of policies has the characteristic that whenever an instance of
the entity class is added/modified, the policy only needs to be evaluated on the new member.
- -
- Collection (EC-Col) Policy: A policy that holds on a collection of instances of the entity class.
For example, the number of ports of type X in the fabric is less than N and also all HBAs should be
from the same vendor (this policy is also a collection policy since in order to evaluate the policy for the new
instance, it is required to get information about existing instances). This class of policies might require checking all instances for final evaluation.
2. Single-Path (SPTH) Policies: These policies are defined on more than one entity on a single path of
the SAN. For example, all Vendor-A hosts must be connected to Vendor-S storage.
Importantly, SPTH policies have the characteristic that the policy is required to hold on each path. In our
example, each and every path between hosts and storages must satisfy this policy.
This characteristic implies that on application of any operation, there is no need to
evaluate this policy on old paths. Only new paths need to be checked. The relevant operations for these policies
are addition/deletion/modification of paths or modification of a ``dependent" attribute (vendor name) of a ``dependent"
entity (storage controller) on the path.
3. Multiple-Paths (MPTH) Policies: These policies are defined across multiple paths of the SAN. For
example, all hosts should have atleast two and atmost four disjoint paths to storage, and a Vendor-A
host should be connected to atmost five controllers. MPTH policies cannot be decomposed to hold on individual
paths for every operation. For the examples, adding a host requires checking only for the new paths created,
whereas adding a switch-controller link requires checks on earlier paths as well. We are working on developing a
notion distinguishing between the two cases. Informally, typically an operation affecting only the
``principal" entity of the policy (host in the examples) does not require checking old paths. In this paper,
we consider MPTH policy as affecting all paths. The relevant operations for these policies are
addition/deletion/modification of paths or modification of a ``dependent" attribute of a ``dependent"
entity on the path.
4. Zoning/LUN-Masking (ZL) Policies: These policies are defined on zones or LUN-Mask sets of the SAN.
For example, a zone should have atmost N ports, and a zone should not have both windows or
linux hosts. For our discussion, we only use zone policies, though the same approach can be used for
LUN-Masking policies. Notice that these policies are similar to EC policies with entity-class being
analogously replaced by zones or LUN-Mask sets. Just as EC policies are defined on attributes of entity
instances, ZL policies are defined on attributes of zone instances. Also similar to EC policies, Zone policies can
be collection policies, requiring evaluation over multiple zones, (e.g. the number of zones in
the fabric should be atmost N - such a policy is required since the switches have a limit on the
number of zones they can handle) and
individual policies, requiring evaluation only over an added/modified zone (e.g. all hosts in the zone
must be from the same vendor). Also, within a zone, a policy might require evaluation over only
the added/modified component (Zone-Member-Ind) or all components (Zone-Member-Col).
An example of a Zone-Member-Ind policy is all hosts in the zone should be windows, and
an example of Zone-Member-Col policy is a zone should have atmost N ports. The relevant
operations for this class of policies are addition/deletion of a zone instance or modification of an
instance (addition/deletion of ports in the zone).
Note that the aim of this classification is not to semantically classify all conceivable policies, but rather to identify
the policies that can be optimized for evaluation. Having said that, using our classification scheme, it
was indeed possible to classify all policies mentioned in [1], the only public set of SAN policies
collected from administrators and domain experts. The basic difference between the classification
scheme in [1] and our scheme stems from the fact that it classifies policies
based on specification criteria, while we use the internal execution criteria for the classification. This helps us
in generating optimized evaluation code by checking only the relevant regions of the SAN.
6.2 Caching
The second optimization we propose, uses a caching scheme to cache relevant data at all nodes of the
SAN resource graph. Such a scheme is extremely useful in an impact-analysis framework due to the
commonality of data accessed in the following scenarios:
1. Multiple executions of a single policy: A single policy might be executed
multiple times on the same entity instance due to the chaining of actions, defined in the
then clause of the triggered policies. Any previous evaluation data can be easily reused.
2. Execution of a single policy for different instances of entities: For example,
consider an operation of adding a policy like all Vendor-A hosts should be connected to Vendor-S storage.
For impact analysis, the policy needs to be evaluated for all hosts. In our immediate-neighbor scheme,
for the evaluation of this policy, a host, say Host-H, would call its HBA's
getController()
function, which in
turn would call its ports'
getController()
function, which would call the edge switch (say Switch-L)
and so on. Now, when any other host connected to Switch-L calls its
getController()
function, it can reuse the data obtained during the previous evaluation for Host-H.
Note that with no replacement, the caching implies that traversal of any edge during a policy evaluation
for all entity instances is done atmost once. This is due to the fact that after traversing an edge
{u,v} once, the required data from v would be available in the cache at u, thus preventing its
repeated traversal.
3. Locality of data required across multiple policies: It is also possible, and often the
case, that multiple policies require accessing different attributes of the same entity. As mentioned earlier,
we do not apply filters to the ``edge" entities (e.g. controllers for a
getController()
call) and
retrieve the full list of entities. Now, this cached entry can be used by multiple policies, even when
their ``dependent" attributes are different.
As mentioned earlier, the caching scheme incorporates filters as well. Whenever an API function is called with
a filter, the entity saves the filter along with the results of the function call and a cache hit at
an entity occurs only when there is a complete match, i.e. the cached entry has the same API function call
as the new request and the associated filters are also the same. This condition can be relaxed by allowing
a partial match, in which the cached entry is for the same function call, but can have a more general
filter. For example, assume a cache entry for
getController()
with the filter Switch.Vendor=``W".
Now, if the new request requires controllers with the filter Switch.Vendor=``W" AND Switch.FirmwareLevel > x,
the result can be computed from the cached data itself. We leave this for future work. Also, the current
caching scheme uses LRU for replacement.
6.3 Aggregation
It is also possible to improve the efficiency of policy execution by keeping certain aggregate data
structures. For example, consider a policy which mandates that the number of ports in a zone
must be atleast M and atmost N. With every addition/deletion of a port in the zone, this policy
needs to be evaluated. However, each evaluation would require counting the number of ports in the
zone. Imagine keeping an aggregate data structure that keeps the number of ports in every zone. Now,
whenever a port is added/deleted, the policy evaluation reduces to a single check of the current
count value.
We have identified the following three classes of policies that can simple aggregate data structures:
1. Unique: This class of policies require a certain attribute of entities to be unique. For example,
policies like the WWNs of all devices should be unique, all Fibre Channel switches must have unique
domain IDs. For these class of policies, a hashtable is generated on the attribute and whenever an operation
triggers this policy, the policy is evaluated by looking up that hashtable. This aggregate data structure can
provide good performance improvements especially in big SANs (Section-7). Note that such
an aggregate is kept only for EC and ZL policies (where it is easier to identify addition/deletion). However, there
does not appear to be any realistic SPTH or MPTH unique policies.
2. Counts: These policies require counting a certain attribute of an entity. Keeping
the count of the attribute prevents repeated counting whenever the policy is required to be evaluated. Instead,
the count aggregate is incremented/decremented when the entity is added/deleted. A count aggregate is used only
for EC and ZL policies. While SPTH and MPTH count policies do exist (e.g. there must be atmost N
hops between host and storage and there must be atleast one and atmost four disjoint paths between host and storage
respectively), maintaining the counts is tricky and we do not use an aggregate.
3. Transformable: It is easy to see that the policy evaluation complexity is roughly of the order
EC-Ind = Zone-Member-Ind < EC-Col = Zone-Member-Col < SPTH < MPTH. It
is actually possible to transform many policies into a lower complexity policy by keeping additional
information about some of the dependent entities. For example, consider a policy like all storage should
be from the same vendor. This policy is an EC-Col for entity class - Storage. However, keeping
information about the current type of storage (T) in the system, the policy can be reduced to an equivalent EC-Ind
policy - all storage should be of type T. Similarly, a Zone-Member-Col policy
like a zone should not be both windows and linux hosts can be transformed into multiple
Zone-Member-Ind policies there should be only type Ti hosts in zone Zi , where Ti is the
current type of hosts in Zi . For these transformed policies, a pointer to the entity that provides
the value to aggregate is also stored. This is required, since when the entity is deleted, the aggregate
structure can be invalidated (can be re-populated using another entity, if existing).
For all other policies, we currently do not use any aggregate data structures.
7 Experimental Setup and Results
In this section, we evaluate our proposed optimizations as compared to the base policy evaluation
provided by current engines. We start by describing our experimental setup beginning with the policy set.
With the policy based management being in a nascent state so far, there does not exist any public set of policies
that is used in a real SAN environment. The list of policies contained in [1] is indicative
of the type of possible policies and not an accurate ``trace" for an actual SAN policy set.
As a result, it is tough to analyze the overall and cumulative benefits of the optimizations for a real SAN.
To overcome this, we try to demonstrate the benefits of optimizations for different categories of policies
individually. As mentioned earlier, since we have been able to classify all policies in
[1] according to our scheme, the benefits would be additive and overall useful for
a real SAN as well. In addition, this provides a good way of comparing the optimization techniques for each
policy class.
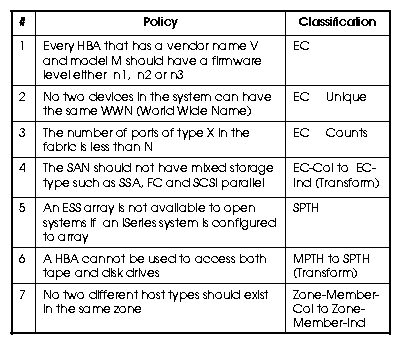
We selected a set of 7 policies (Figure-3) as our working sample.
Four of them are EC policies, two are path policies (SPTH and MPTH) and one is a zone policy.
All 7 policies are classified according to the classification mechanisms presented in
Section-6.1. Any aggregates that are possible for policies are also shown.
For this set of policies, we will evaluate the effectiveness of our optimizations individually.
An important design goal for Zodiac was scalability and ability to perform impact analysis efficiently even
on huge SANs of 1000 hosts and 200 controllers. Since it was not possible to construct such large SANs in the lab, for our experiments,
we emulated four different sized SANs. Please note that in practice, Zodiac can work with any real SAN using
an SMI-S compliant data store.
In our experimental SANs, we used hosts with two HBAs each and each HBA having two ports. Storage controllers
had four ports each. The fabric was a core-edge design with 16-port edge and 128-port core
switches. Each switch left
certain ports unallocated, to simulate SANs constructed with future growth in mind. The four different
configurations correspond to different number of hosts and controllers:
- 1000-200: First configuration is an example of a big SAN, found in many data centers.
It consists of 1000 hosts and 200 controllers with each host accessing all controllers (full connectivity).
There were 100 zones.
- 750-150: This configuration uses 750 hosts and 150 controllers with full connectivity.
There were 75 zones.
- 500-100: This configuration has 500 hosts, 100 controllers and 50 zones.
- 250-50: This configuration is a relatively smaller SAN with 250 hosts, 50 controllers and 25 zones.
For our experiments, we evaluate each of the policies in the policy-set with the following techniques:
- base: This technique is the naive implementation, in which there is no identification of the
relevant region of the SAN. Only information available is the vanilla scope of the policy. Due to lack
of classification logic, this implementation implies that the evaluation engine uses the same logic
of code generation for all policies (check for all paths and all entities). Also, there is no intermediate
caching and no aggregate data structures are used.
- class: This implementation uses the classification mechanism on top of the base framework. Thus,
it is possible to optimize policies by only evaluating over a relevant SAN region, but no caching
or aggregation is used.
- cach: This implementation technique caching on top of the base framework.
No classification or aggregation is used.
- agg: This implementation technique only uses aggregate data structures for the policies (where ever
possible). There is no caching or classification.
- all: This implementation uses a combination of all three optimization techniques.
Using these five classes of implementation, we intend to show (a) inadequacy of the base policy, (b) advantages of
each optimization technique and (c) the performance of the all
implementation. Zodiac is currently running on a P4 1.8 GHz machine with 512 MB RAM.
In this section, we present our results of evaluating each policy 100 times to simulate scenarios of chaining and
execution for multiple instances (e.g. adding 10 hosts). The policies are evaluated for all four SAN configurations
(X-axis). The Y-axis plots the time taken to evaluate the policies in milliseconds. The results have been
averaged over 10 runs.
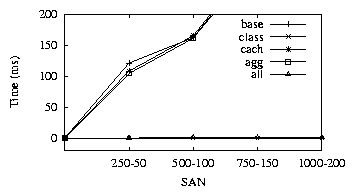
``Every HBA that has a vendor name V and model M should have a firmware level either n1, n2 or n3"
The first policy requires a certain condition to hold on an HBA entity class. We analyze the impact of the policy
when an HBA is added. The base implementation will trigger the HBA scope and try to evaluate
this policy. Due to its lack of classification logic, it will end up evaluating the policy afresh
and thus, for all HBA instances. The class implementation would identify it to be an EC-Ind
policy and only evaluate on the new HBA entity. The cach implementation does not help since
there is no traversal of the graph. The agg implementation also does not help. As a result, all
implementation is equivalent to having only optimization. Figure-4 shows the results
for the different SAN configurations.
Figure 4:
Policy-1. class, all provide maximum benefit
|
As seen from the graph, there is a significant difference between the best optimized evaluation (all) and the base
evaluation. Also, as the size of the SAN increases, the costs for the base implementation increase, while
the all implementation stays the same, since irrespective of SAN size, it only needs to evaluate the policy
for the newly added HBA.
``No two devices in the system can have the same WWN."
The second policy ensures uniqueness of world wide names (WWNs). We analyze the impact when a new host is added. The base
implementation will trigger the device scope without classification and
check that all devices have unique WWNs. The class implementation will only check that the new host has a unique WWN.
The cach implementation performs similar to base.
The agg implementation will create a hashtable, and do hashtbale lookups. The all implementation
also uses the hashtable and only checks the new host.
Figure 5:
Policy-2. agg, all provide maximum benefit
|
As Figure-5 shows, agg and all perform much better than the implementation. performs
better than by recognizing that only the new host needs to be checked.
``The number of ports of type X in the fabric is less than N."
The third policy limits the total number of ports in the fabric. We analyze the impact of adding a new host
with 4 ports to the SAN. For each added port, the base implementation will count the total number of ports
in the fabric. The class implementation performs no better, since it is an EC-Col policy. The cach implementation
also does not help. The agg implementation keeps a count of the number of ports and only increments the
count and checks against the upper limit. The all implementation also exploits the aggregate keeping.
Figure 6:
Policy-3. agg, all provide maximum benefit
|
As can be seen from Figure-6, and perform significantly better due to the ability of
aggregating the required information for the policy evaluation.
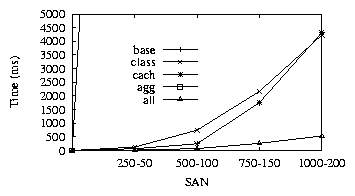
``The SAN should not have mixed storage type such as SSA, FC and SCSI parallel"
The fourth policy ensures that the SAN has uniform storage type. For this policy, we analyze the impact of
adding a new storage controller. The base implementation will trigger the storage scope and evaluate
the policy ensuring all controllers are the same type. The cach implementation will not help. The
class implementation only checks that the newly added controller is the same type as every other
controller. The agg implementation will transform the policy to an EC-Ind policy by keeping an aggregate
value of the current controller type, T in the SAN. However, without classification, it would end up checking
that all controllers have the type T. The all implementation combines the classification logic and
the aggregate transformation to only check for the new controller.
Figure 7:
Policy-4. all provides maximum benefit
|
Figure-7 shows the result with all performing the best, while class and agg doing better
than base and cach. The difference between the best and poor implementations is small since
the total number of controllers is small.
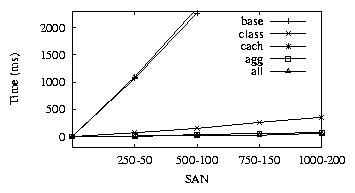
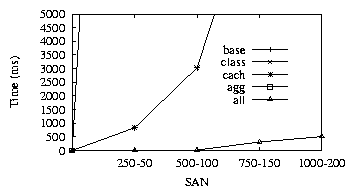
``An ESS array is not available to open systems if an iSeries system is configured to array."
The fifth policy is an SPTH policy that checks that an iSeries open systems host does not work if an
ESS array is used with the controller. We analyze the impact of adding a new host to the SAN for this
policy. The base implementation ensures that all iSeries open systems hosts do not have any
ESS controllers connected to them. This requires calling the
getController()
API functions of
the host entities and will cause traversals of the graph for all host-storage connections. The class
implementation identifies that it being an SPTH, only the new created paths (paths between the newly
added host and the connected storage controllers) need to be checked. The cach implementation will
run similar to base , but will cache all function call results at intermediate nodes (As mentioned
before, it would mean that each edge will be traversed atmost once). The agg implementation does
not help and the all implementation would use both the classification logic and the caching.
Figure 8:
Policy-5. Only all provides maximum benefit
|
As shown in Figure-8, the base and agg implementation perform extremely poorly (multiple
orders of magnitude in difference) due to multiple traversals for the huge SAN graph. On the other
hand, class and cach are able to optimize significantly and their combination in the all
implementation provides drastic overall benefits. It also scales extremely well with the increasing SAN
size.
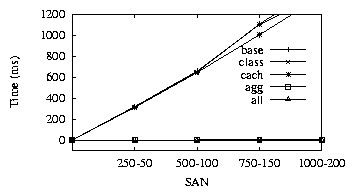
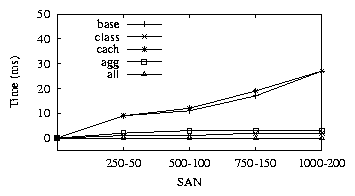
``A HBA cannot be used to access both tape and disk drives."
The sixth policy is an MPTH policy which requires checking that each HBA is either connected to tape
or disk storage. We analyze the impact of adding a host with 2 HBAs to the SAN. The base implementation
would check the policy for all existing HBAs. The cach implementation would do the same, except the
caching of results at intermediate nodes. The class implementation does not optimize in this case since it
considers it an MPTH policy and checks for all paths (Section-6.1). The agg implementation
transforms the policy to an SPTH by keeping aggregate for the type of storage being accessed, but checks
for all HBAs due to the lack of classification logic. The all implementation is
able to transform the policy and then use the SPTH classification logic to only check for the newly added HBAs.
Figure 9:
Policy-6. Only all provides maximum benefit
|
Figure-9 shows the results. The base, class and agg implementation perform much poorly then
the cach implementation, since the cach implementation reuses data collected once for the other. The
all implementation performs the best by combining all optimizations.
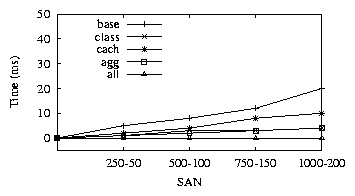
``No two different host types should exist in the same zone."
The seventh policy requires that all host types should be the same in zones. We analyze the impact of
adding a host HBA port to a zone. The base implementation would check that all hosts in each zone are
of the same type. The class implementation would check only for the affected zone. The cach implementation
would be the same as base . The agg implementation would keep an aggregate host type for each zone and
check the policy for all zones. The all implementation would combine the aggregate with the classification
and only check for the affected zone, that the new host has the same type as the aggregate host type value.
Figure-10 shows the results. Again all implementation performs the best, though the difference between
all implementations is small.
Figure 10:
Policy-7. all provides maximum benefit
|
8 Discussion
One of the main objectives of the Zodiac framework is to efficiently perform impact analysis for policy enabled
SANs. It is important to note that the optimizations described in this paper attack the problem at a higher
conceptual level, manipulating the design and evaluation of policies. In the overall impact analysis picture,
more optimizations will be plugged-in at other layers. For example, another layer of optimizations is while obtaining
the data required for policy evaluation from the SMI-S data provider. In the CIM architecture [13],
the CIM client obtains data from the provider over the network. This process can be optimized by techniques like
batching of requests, pre-fetching and data caching at the client. Another important layer is the query language
used for evaluating the policies. For example, it is possible to evaluate the policies using SQL by designing a
local database scheme which is populated by the CIM client. While we continue to investigate such optimizations,
Zodiac has been designed in a manner that it is easily possible to accommodate these into the overall framework.
9 Conclusions and Future Work
In this paper, we presented Zodiac - an efficient impact analysis framework for storage area networks. Zodiac
enables system administrators to do proactive change analysis, by evaluating the impact of their proposed changes
This analysis is fast, scalable and thorough. It
includes the impact on SAN resources, existing policies and also, due to the actions triggered by any
of the violated policies. In order to make the system efficient, we proposed three optimizations -
classification, caching and aggregation. Based on our analysis and experimental results, we find that
each optimization has a niche of evaluation scenarios where it is most effective. For example, caching
helps the most during the evaluation of path policies. Overall, a
combination of the three optimization techniques yields the maximum benefits.
In future, we intend to follow two lines of work. The first includes developing more optimization
techniques - smarter analysis for MPTH policies and use of parallelism (works for SPTH policies),
to name a few and the design of a policy specification language that allows determination of these optimizations.
The second direction explores the integration of the impact analysis framework
with various SAN planning tools in order to provide better overall designs and potentially
suggesting appropriate system policies for given design requirements.
- 1
-
AGRAWAL, D., GILES, J., LEE, K., VORUGANTI, K., AND ADIB, K.
Policy-Based Validation of SAN Configuration.
POLICY '04.
- 2
-
ALVAREZ, G., BOROWSKY, E., GO, S., ROMER, T., SZENDY, R., GOLDING, R.,
MERCHANT, A., SPASOJEVIC, M., VEITCH, A., AND WILKES, J.
Minerva: An Automated Resource Provisioning tool for large-scale
Storage Systems.
ACM Trans. Comput. Syst. 19, 4 (2001).
- 3
-
ANDERSON, E.
Simple table-based modeling of storage devices.
HP Labs Tech Report HPL-SSP-2001-4 (2001).
- 4
-
ANDERSON, E., HOBBS, M., KEETON, K., SPENCE, S., UYSAL, M., AND VEITCH,
A.
Hippodrome: Running Circles Around Storage Administration.
In FAST (2002).
- 5
-
ANDERSON, E., KALLAHALLA, M., SPENCE, S., SWAMINATHAN, R., AND WANG, Q.
Ergastulum: Quickly finding near-optimal Storage System Designs.
HP Tech Report HPL-SSP-2001-5 (2001).
- 6
-
ASSOCIATES, C.
BrightStor.
https://www.ca.com (2005).
- 7
-
BANDARA, A., LUPU, E., AND RUSSO, A.
Using Event Calculus to Formalise Policy Specification and
Analysis.
POLICY '03.
- 8
-
BERENBRINK, P., BRINKMANN, A., AND SCHEIDELER, C.
SimLab - A Simulation Environment for Storage Area
Networks.
In Workshop on Parallel and Distributed Processing (PDP)
(2001).
- 9
-
BUCY, J., GANGER, G., AND CONTRIBUTORS.
The DiskSim Simulation Environment.
CMU-CS-03-102 (2003).
- 10
-
CHAUDHURI, S., AND NARASAYYA, V.
AutoAdmin 'what-if' Index Analysis Utility.
In SIGMOD (1998).
- 11
-
COHEN, I., CHASE, J., GOLDSZMIDT, M., KELLY, T., AND SYMONS, J.
Correlating Instrumentation Data to System States: A Building Block
for Automated Diagnosis and Control.
In OSDI (2004).
- 12
-
DAMIANOU, N., DULAY, N., LUPU, E., AND SLOMAN, M.
The Ponder Policy Specification Language.
In POLICY (2001).
- 13
-
DMTF.
Common Information Model.
https://www.dmtf.org.
- 14
-
DOYLE, R., CHASE, J., ASAD, O., W., AND VAHDAT, A.
Model-based resource provisioning in a web service utility.
In USENIX Symposium on Internet Technologies and Systems
(2003).
- 15
-
EMC.
Control Center.
https://www.emc.com (2005).
- 16
-
EMC.
SAN Advisor.
https://www.emc.com (2005).
- 17
-
FU, Z., WU, S., HUANG, H., LOH, K., GONG, F., BALDINE, I., AND XU, C.
IPSec/VPN Security Policy: Correctness, Conflict Detection, and
Resolution.
In Workshop on Policies for Distributed Systems and Networks
(2001).
- 18
-
GANGER, G., STRUNK, J., AND KLOSTERMAN, A.
Self-* Storage: Brick-based Storage with Automated Administration.
CMU Tech Report CMU-CS-03-178 (2003).
- 19
-
HP.
StorageWorks SAN.
- 20
-
IBM.
TotalStorage Productivity Center.
- 21
-
INTELLIMAGIC.
Disc Magic.
https://www.intellimagic.nl (2005).
- 22
-
KEETON, K.
Designing for disasters.
In FAST (2004).
- 23
-
KEETON, K., AND MERCHANT, A.
A Framework for Evaluating Storage System Dependability.
In International Conference on Dependable Systems and Networks
(DSN'04) (2004).
- 24
-
LYMBEROPOULOS, L., LUPU, E., AND SLOMAN, M.
An Adaptive Policy-based Framework for Network Services Management.
Journal of Networks and System Management 11, 3 (2003).
- 25
-
MOLERO, X., SILLA, F., SANTONJA, V., AND DUATO, J.
Modeling and Simulation of Storage Area Networks.
In MASCOTS (2000).
- 26
-
ONARO.
SANscreen.
https://www.onaro.com.
- 27
-
RUEMMLER, C., AND WILKES, J.
An Introduction to Disk Drive Modeling.
IEEE Computer 27, 3 (1994).
- 28
-
SNIA.
Storage Management Initiative.
https://www.snia.org.
- 29
-
THERESKA, E., NARAYANAN, D., AND GANGER, G.
Towards self-predicting systems: What if you could ask ``what-if"?
In Workshop on Self-adaptive and Autonomic Comp. Systems
(2005).
- 30
-
VARKI, E., MERCHANT, A., XU, J., AND QIU, X.
Issues and Challegenges in the Performance Analysis of Real
Disk Arrays.
IEEE Transactions on Parallel and Distributed Systems 15, 6
(2004).
- 31
-
WANG, M., AU, K., AILAMAKI, A., BROCKWELL, A., FALOUTSOS, C., AND GANGER,
G.
Storage device performance prediction with CART models.
SIGMETRICS Performance Eval. Review 32, 1 (2004).
- 32
-
WARD, J., SULLIVAN, M., SHAHOUMIAN, T., AND WILKES, J.
Appia: Automatic Storage Area Network Fabric Design.
In FAST '02.
- 33
-
WARD, J., SULLIVAN, M., SHAHOUMIAN, T., WILKES, J., WU, R., AND BEYER, D.
Appia and the HP SAN Designer: Automatic Storage Area
Network Fabric Design.
In HP Tech. Conference (2003).
- 34
-
WILKES, J.
The Pantheon Storage-System Simulator.
HP Labs Tech Report HPL-SSP-95-14 (1995).
Zodiac: Efficient Impact Analysis for Storage Area Networks
This document was generated using the
LaTeX2HTML translator Version 2K.1beta (1.49)
Copyright © 1993, 1994, 1995, 1996,
Nikos Drakos,
Computer Based Learning Unit, University of Leeds.
Copyright © 1997, 1998, 1999,
Ross Moore,
Mathematics Department, Macquarie University, Sydney.
The command line arguments were:
latex2html -split 0 -show_section_numbers -local_icons main.tex
The translation was initiated by Aameek Singh on 2005-10-09
Aameek Singh
2005-10-09
|