Optimizing Collective Communication on Multicores
Rajesh Nishtala
University of California, Berkeley
Katherine A. Yelick
University of California, Berkeley
Abstract:
As the gap in performance between the processors and the memory
systems continue to grow, the communication component of an
application will dictate the overall application performance and
scalability. Therefore it is useful to abstract common communication operations
across cores as collective communication operations and tune them through
a runtime library that can employ sophisticated automatic tuning techniques. Our focus of this paper is on collective
communication in Partitioned Global Address Space languages which are a natural
extension of the shared memory hardware of modern multicore
systems. In particular we highlight how automatic tuning can lead to
significant performance improvements and show how loosening the
synchronization semantics of a collective can lead to a more efficient
use of the memory system. We demonstrate that loosely synchronized
collectives can realize consistent speedups over their
strictly synchronized counterparts
on the highly threaded Sun Niagara2 for message sizes ranging from 8
bytes to 64kB. We thus argue that the synchronization requirements for
a collective must be exposed in the interface so the collective and
the synchronization can be optimized together.
Current hardware trends show that the number of cores per chip is growing at an exponential pace
and we will see hundreds
processor cores within a socket in the near future [5]. However, the
performance of the communication and memory system has not kept pace
with this rapid growth in processor performance [20].
Transferring data from a core on one socket to a core on another or synchronizing
between cores takes many cycles, and a small
fraction of the cores are enough to saturate the available memory
bandwidth.
Thus many application designers and programmers aim to improve performance by
reducing the amount of time threads are stalled waiting for memory
or synchronization.
Communication in its most general form, meaning the movement of data
between cores, within cores, and within memory systems, will be the
dominant cost in both running time and energy consumption. Thus, it
will be increasingly important to avoid unnecessary communication and
synchronization, optimize communication primitives and schedule
communication to avoid contention and maximize use of memory
bandwidth. The wide variety of processor interconnect mechanisms and
topologies further aggravate the problem and necessitate either (1) a
platform specific implementation of the communication and
synchronization primitives or (2) a system that can automatically tune
the communication and synchronization primitives across a wide variety
of architectures. In this work we focus on the latter.
Many communication-intensive problems involve global communication, in
which one thread broadcasts to others, one thread combines values
from others, or data is exchanged between threads in operations
such as a transpose. To coordinate communication operations across
cores, it is often useful to think of these as collective
communication operations, in which a group of threads collectively
work to perform the global communication operation. Collective
communication is very popular in programming models that involve a
fixed set of parallel threads, because multiple threads can combine
together to perform the communication efficiently through combining
trees or other structures, rather than having a single thread
perform all of the work. Collective communication is widely used in
message passing (MPI [14]) programs and in global
address space models like UPC [18] for both convenience and
scalability.
While the collective communication problem has been well studied in
the context of message passing on distributed memory
clusters [16],
we focus on Partitioned Global Address Space Languages (PGAS) such as
UPC, Co-Array Fortran [9],
and Titanium [21] on multicore and SMP systems.
The key feature that distinguishes PGAS languages from message passing
is the use of one-sided as opposed to two-sided communication:
threads in a PGAS language communicate by reading and writing remote
data without the need for a matching communication operation on
the other side. One-sided communication decouples data transfer from
synchronization and therefore allows for faster
communication [7] on clusters, where they are
most commonly used. PGAS languages are also a natural fit for
multicore and SMP systems because
they directly use their shared memory hardware while still giving
control over locality which is important on multi-socket systems. We will show that the one-sided model
when extended to collective operations allows for
much higher communication bandwidth and better overall collective
performance and throughput on shared memory architectures.
Our Position: Collective communication operations are useful
in programming multicore systems because they encapsulate performance-critical data
movement operations. Automatic tuning can significantly improve
performance by selecting the right implementation for a given system
and communication pattern. Loosening the
synchronization requirements for collective operations can
also improve performance, and the synchronization
requirements should be a parameter in the tuning process.
The techniques and analysis in this paper
apply to many common data movement and synchronization patterns
such as Broadcast, Scatter, Gather,
Barrier, Exchange and Reduce. Due to space considerations, we
discuss the following two operations:
Barrier: A thread can not exit a call to a barrier
until all the other threads have called the barrier.
Reduce: Every thread sends a contribution to a
global combining operation. For example, if the desired result is the sum of a
vector of elements where each thread has a different value of
, the result on the root thread is
.
The operations sum, minimum, and maximum are usually built-in and
the user is allowed to supply more complicated functions.
2 Tuning Collectives for Shared Memory
The wide variety of architectures that are currently
deployed and under development necessitates a system that can
automatically tune these operations rather than wasting valuable time
hand-tuning. As the number of cores continues to grow, the performance and scalability of these
algorithms will play a more prominent role in the overall application
performance.
2.1 The Tuning Space
There have been many related projects that have focused their efforts
on hand-tuning collectives including a few that have focused on
automatically tuning these operations for clusters[16]. From the body of
literature it is clear that the tuning space is indeed
large. For example,
for a rooted collective there are an exponential number of tree shapes
that can be used to disseminate the data. Our
experience and related work has shown that the following parameters
affect the choice of the optimal algorithm. Further research will show
whether this list is sufficient to capture all the parameters
needed. Factors that influence performance include:
processor type/speed,
interconnect topology,
interconnect latency,
interconnect bandwidth,
number of threads involved,
size of the messages being transferred,
synchronization mode,
network load,
mix of collectives that the user performs,
amount of local memory available for collectives.
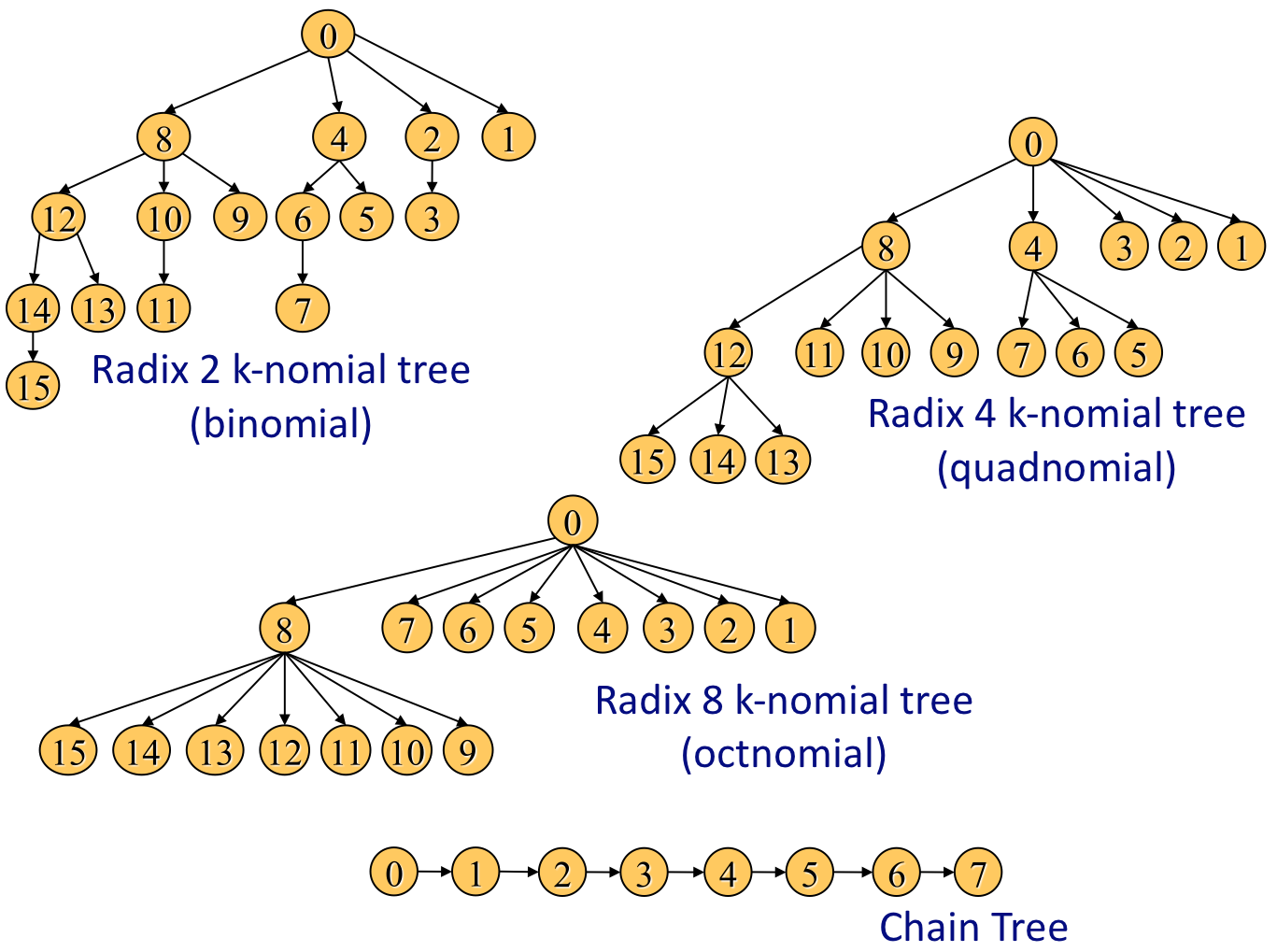
Figure 1:
Example Tree Topologies
 |
2.2 Algorithm Selection
To motivate our work we initially focus on an important collective found in many applications: a barrier
synchronization. Having a faster barrier allows the programmer to
write finer-grained synchronous code and conversely a slow barrier
hinders application scalability as shown by Amdahl's Law. As highlighted in the seminal work by Mellor-Crummey and
Scott [13], there are many choices of
algorithms to implement a barrier across the threads.
One of the critical choices that affects
overall collective scalability is the communication topology and
schedule that the threads use to communicate and synchronize with each
other. Tree-based collectives allow the work to be
more effectively parallelized across all the cores rather than
serializing at one root thread, thereby taking advantage of more of
the computational facilities available. These are extensions of the binomial tree found
in [10] where a radix other than 2 is
used. The higher the radix, the shallower the tree. Figure 1 shows a diagram of the trees
used1. While the set of all possible trees
is very large, we only focus on a small subset of them to illustrate
our argument. Thus to implement a barrier each thread signals its
parent once its subtree has arrived and then waits for the parent to
signal it indicating that the barrier is complete. Two passes of
the tree (one up and one down) will complete the barrier. All the
barriers have been implemented through the use of
flags declared as volatile ints and atomic counters.
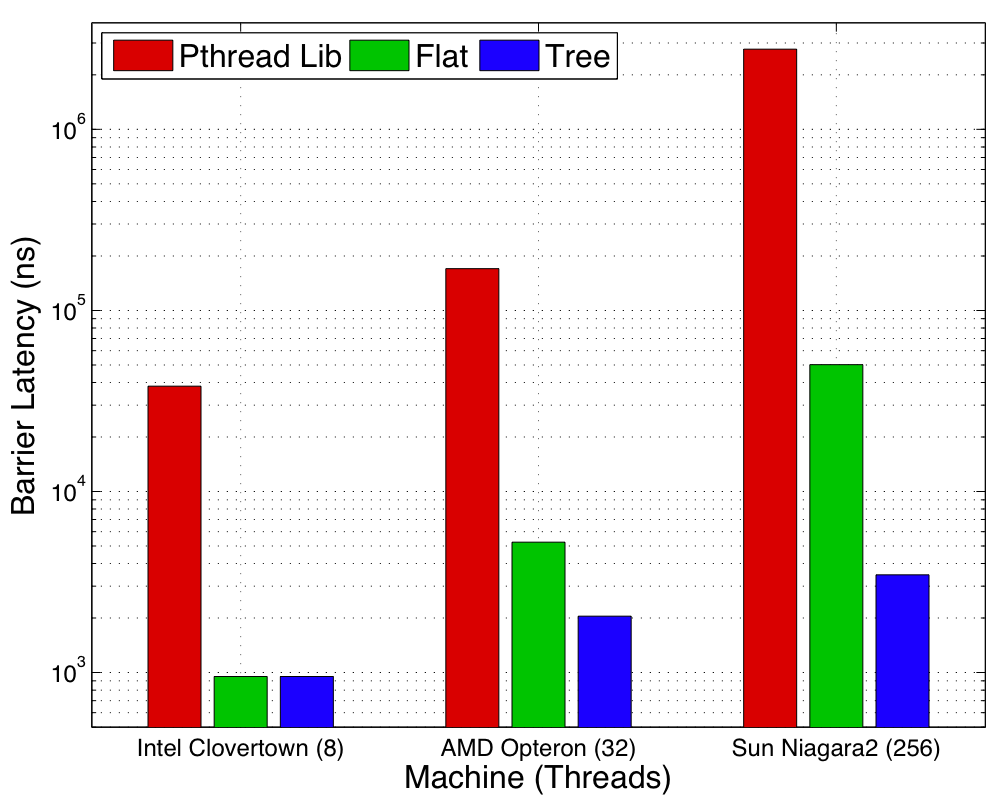
Figure 2:
Barrier Performance
|
Table 1:
Experimental Platforms
| Processor |
GHz |
Cores |
Sockets |
| |
|
(Threads) |
|
| Intel Clovertown[1] |
2.66 |
8 (8) |
2 |
| AMD Barcelona[2] |
2.30 |
32 (32) |
8 |
| Sun Niagara2[3] |
1.40 |
32 (256) |
4 |
|
Figure 2 shows the latency of a
barrier on three modern multicore machines shown in Table 1.
The group of bars labeled
``Pthread Lib'' is the performance of the barrier found in the
pthread library. The bars labeled ``Flat'' show the performance of a flat topology to accomplish a
barrier, (i.e. all threads communicate directly with the root). The
final column, ``Tree,'' shows the performance of the barrier
by selecting the best tree geometry. The pthreads library has been designed to
handle the case when the number of
threads is larger than the number of hardware thread contexts. However as the data show, the pthread library adds
a significant amount of unnecessary overhead if the number of
software threads do not exceed the number of available hardware
thread contexts2. Thus even switching to a flat topology in which the
threads communicate through the cache can yield almost two orders of
magnitude in performance. However as the number of cores continue to
rise at a dramatic rate, simply relying on all cores communicating
directly with one root thread leads to non-scalable code as shown by
the performance data from the Sun Niagara2. Using scalable tree based
algorithms can yield another order of magnitude in performance
improvement. Thus on the Sun Niagara2 we achieve three orders of magnitude
performance gains by tuning the collectives for shared memory.
3 Collective Synchronization
The simplest semantics for a collective communication is to have it
appear to execute in isolation after all preceding code on all
threads has completed and before any succeeding code starts. However,
in a traditional two-sided message passing model, a collective is considered
complete on a particular thread when it has received its piece of
the data. This does not imply that all threads have
received their data, but a thread cannot view such asynchrony
because all communication is done explicitly, and any lagging
thread cannot communicate since it is still tied up executing the
collective. In the case of a global address space model, such asynchrony
may be visible if a thread has received its local
contribution from a collective and then reads or writes data on a
lagging thread. This raises interesting questions about when the
data movement for a collective can start and when a collective is
considered complete. Avoiding synchronization can improve performance
but complicate programming.
We argue that it is essential for the user to specify
the synchronization requirements of the collective to achieve maximum
possible performance so that the synchronization can be factored into
the tuning process.
To illustrate the impacts of collective synchronization we consider
Reduce on the Sun Niagara2. Each Niagara2 socket is composed of 8 cores each of which
multiplexes instructions from 8 hardware thread contexts. Thus, our experimental
platform has support for 256 active threads. Due
to the high thread count, we consider it a good proxy for analyzing
scalability on future manycore platforms. We explore two different
synchronization modes: Loose and Strict. In the Loose synchronization mode, data movement for the
collective can begin as soon as any thread has entered the
collective and continue until the last thread leaves the
collective. In the Strict mode data movement can only start after
all threads have entered the collective and must be completed
before the first thread exits the collective. In all our
examples the Strict synchronization has been achieved by inserting
the aforementioned tuned barrier between each collective. There are many
synchronization modes that lie between these two extremes,
however for the sake of brevity we will focus on the two extremes.
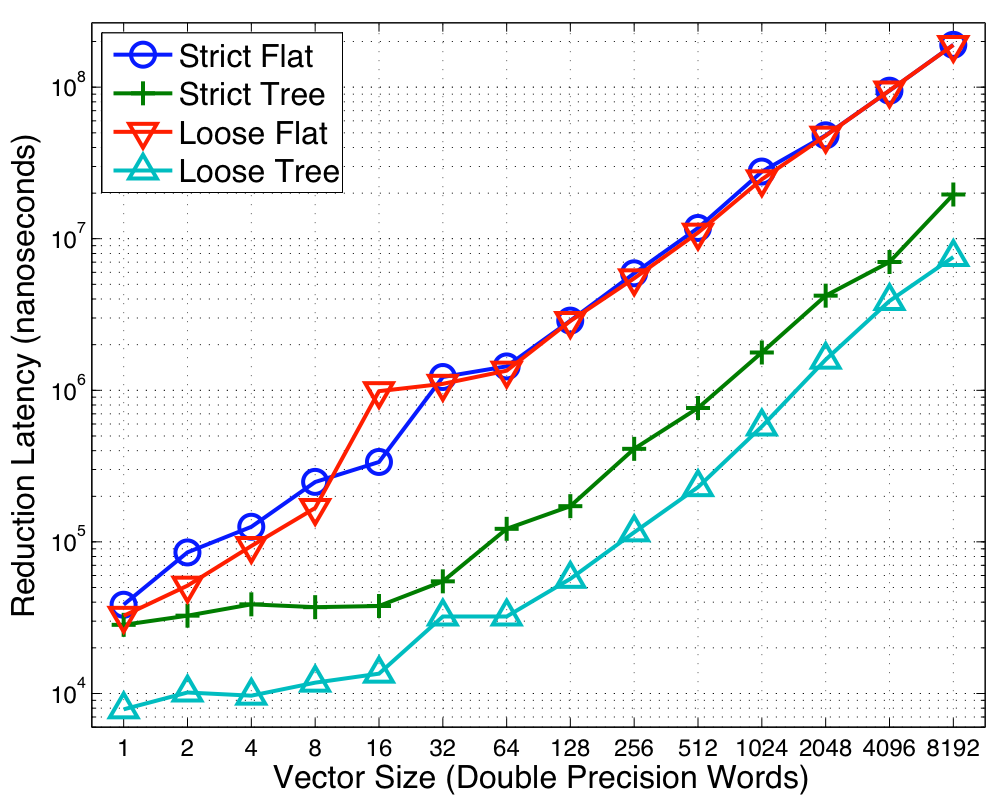
Figure 3:
Reduction Performance on Niagara2
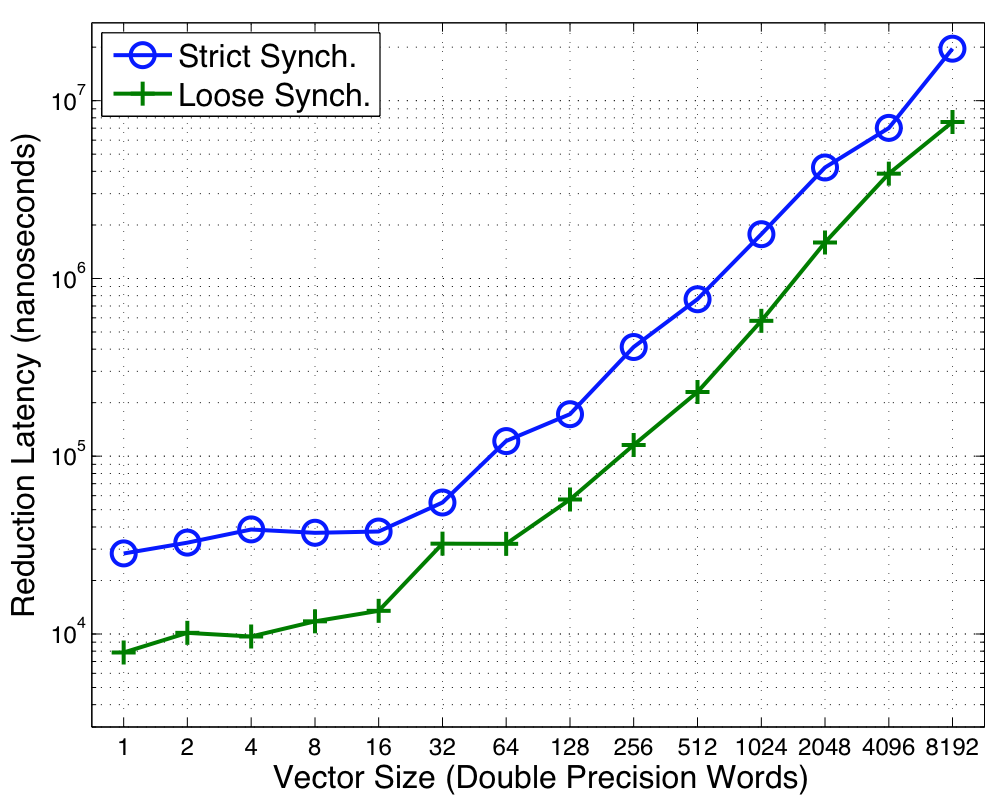 |
Figure 3 shows the performance of Reduce
on the Sun Niagara2. The x-axis shows the
number of doubles reduced in the vector reduction and the y-axis shows
the time taken to perform the reduction on a log scale. As the data show, the
looser synchronization yields significant performance advantages over
a wide range of vector sizes. At the lower vector sizes the memory
system latency becomes the dominant concern. Thus requiring a full
barrier synchronization along with the reduction introduces
significant overheads. Thus, by amortizing the cost of this barrier
across many operations, we can realize significant performance gains.
However, the data also show that the looser synchronization continues
to show factors of 3 improvement in performance over the strict
synchronization versions where one would imagine the operations to be
dominated by bandwidth. Loosely synchronized collectives allow for
better pipelining amongst the different collectives. At high vector
sizes both synchronization modes realize the best performance by using
trees. In a strict
synchronization approach a particular core is only active for a brief
period of time while the data is present at its level of the
tree. During the other times the core is idle. Loosening the
synchronization allows more collectives to be in flight at the same
time and thus pipelined behind each other. This allows the operations
to expose more parallelism to the hardware and decrease the amount of
time the memory system sits idle. As is the case with any
pipelined operation, we have not reduced the latency for a given
operation but rather improved the throughput for all the operations. As the data show in
Figure 3, the median performance gain of the
strict execution time compared to the loose execution time is about
while the maximum is about .
In previous sections we have seen the effectiveness of both collective
tuning and loosely synchronized collectives. In this section we
combine the two pieces and show that the collective synchronization
must be expressed through the interface to realize the best performance.
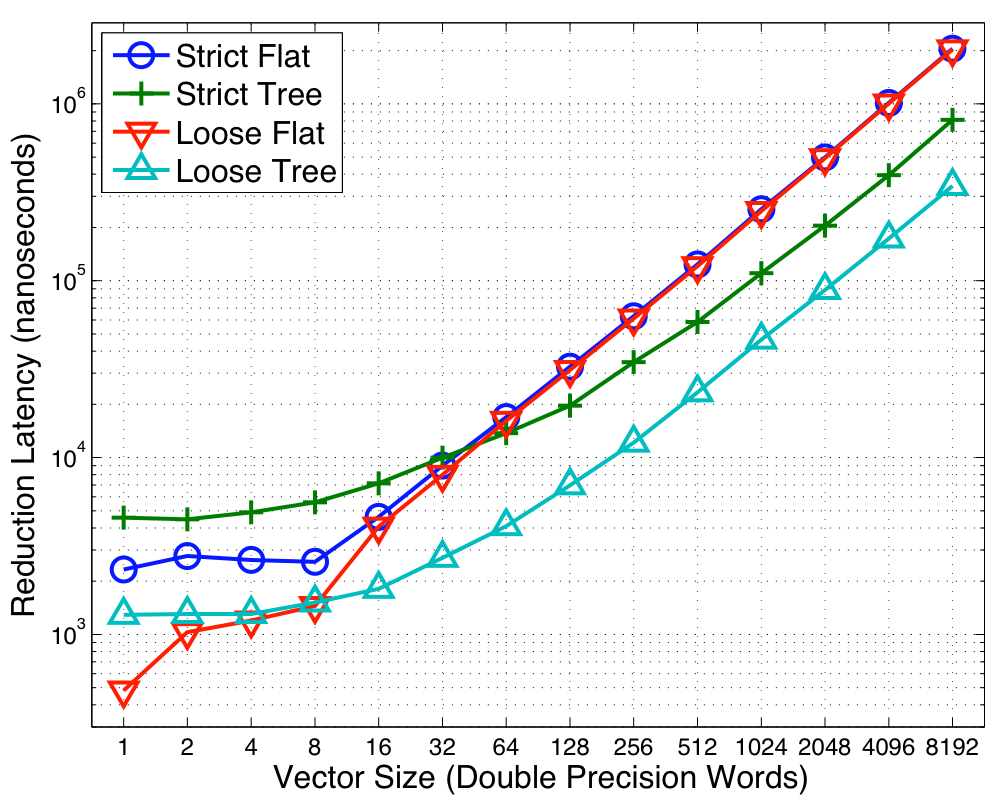
Figure 4:
Optimal Algorithm Selection on Barcelona
|
To illustrate our approach we show the
performance of Reduce on the eight socket quad-core
Barcelona (i.e. 32 Opteron cores). The results
are shown in Figure 4. In the first topology, which we call Flat, the
root thread accumulates the values from all the other threads. Thus
only one core is reading and accumulating the data from the memory
system while the others are idle. In the second topology (labeled
Tree) the threads are connected in a tree described in
Section 23. Once a
child has accumulated the result for all its subtree, it then sends a
signal to the parent allowing the parent to accumulate the data from
all its children. We search over a set of trees and report the performance for the
best tree shape at each of the data points. Unlike the Flat topology the Tree topology
allows more cores to participate in the reduction but forces more
synchronization amongst the cores. Orthogonally we present the two
aforementioned synchronization modes: Loose and Strict.
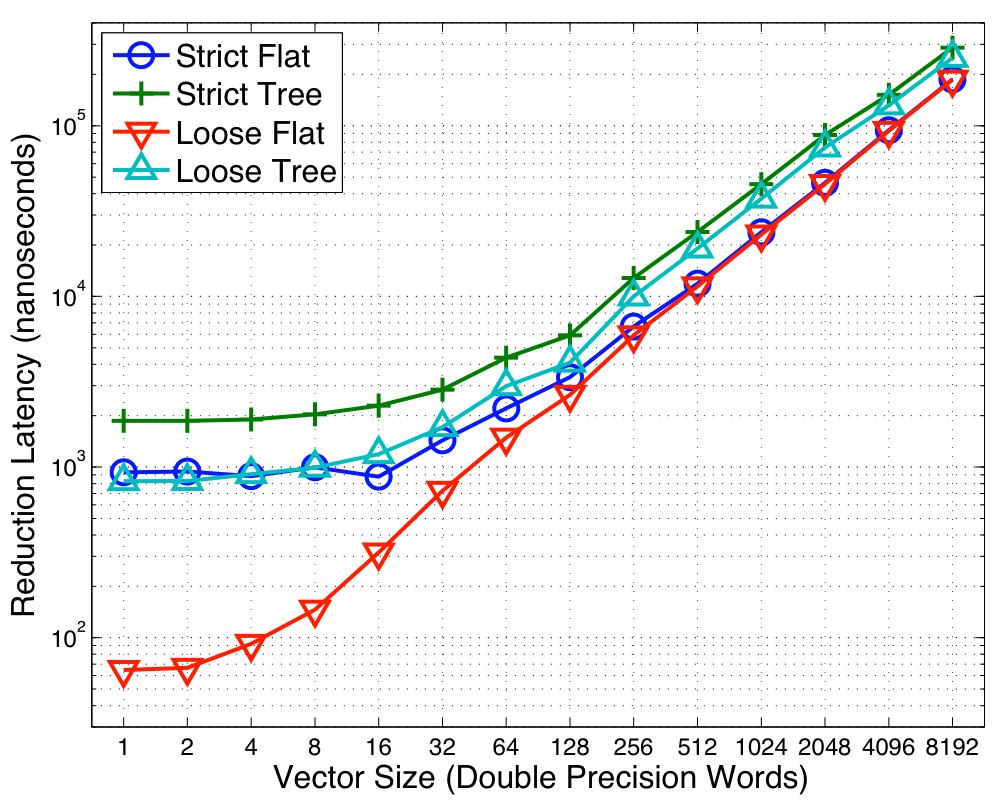
Figure 5:
Optimal Algorithm Selection on Niagara2
|
|
Figure 6:
Optimal Algorithm Selection on Clovertown
|
|
As the data show, the Flat topology outperforms the Trees at smaller
vector sizes. Even in the loosely synchronized collectives, the tree
based implementations require the threads to signal their parents
when they finish accumulating the data for their subtree. Since the
Flat topology outperforms the Tree one, this indicates the
overheads of the point-to-point synchronizations make the algorithm more
costly especially when the memory latency is the biggest
consideration. However, as the vector size increases, serializing all
the computation at the root becomes expensive. Switching
to a tree is a critical for performance in order to engage more of the
functional units and better parallelize the
problem. Both the Strict and Loose see a crossover point that
highlights this tradeoff. As the data also show, the optimal switch-point is dependent on the synchronization
semantics. Since the looser synchronization enables better pipelining
the costs of synchronization can be amortized quicker, thereby
reaping the benefits of parallelism at a smaller vector size. There is a large performance penalty for not picking the
correct crossover point. If we assume that the crossover
between the algorithms is at 8 doubles (the best for the loose
synchronization) for both synchronization modes,
then the strict collective will take twice as long as the optimal. If we employ a
crossover of 32 doubles then a loosely synchronized collective will
take three times as longer. Thus the synchronization
semantics are an integral part of selecting the best algorithm.
The switch-point is heavily dependent on the target architecture
and the concurrency level. The same data is shown for the Niagara2 as well as the Clovertown in
Figures 5 and 6. The high concurrency levels for the Niagara2
mandate trees for both synchronization modes since the scalability and
added parallelism the trees offer is important at all vector
sizes. However, on the Clovertown, the lower thread count implies that the added cost of the point-to-point synchronization
associated with the trees outweighs the benefits from parallelism and
thus the Flat topology performs the best.
Table 2:
Time (in s) for 8kB (1k Double) Reduction. Best
performers for each category are highlighted
| |
Barcelona |
Niagara2 |
| Tree Radix |
Loose |
Strict |
Loose |
Strict |
| 1 |
46.4 |
306 |
576 |
3,103 |
| 2 |
52.9 |
110 |
621 |
2,115 |
| 4 |
60.1 |
119 |
710 |
1,774 |
| 8 |
73.8 |
130 |
1,316 |
2,471 |
| 16 |
110 |
213 |
2,240 |
3,998 |
|
Table 2 shows the performance of Loose and
Strict synchronization on the Barcelona and the Niagara2 as a
function of the tree radix. On both platforms the
Chain tree is the optimal for loosely synchronized collectives and a
higher radix tree is optimal for strictly synchronized
collectives. The lower radices impose a higher latency for the
operation since they imply deeper trees. The higher radices reduce
the amount of parallelism but improve the latency since the trees are
shallower. Thus we tradeoff increased parallelism for increased
latency. If the goal is to maximize collective throughput (as
is the case with loosely synchronized collectives), then the
increased latency is not a concern since it will be amortized over
all the pipelined operations and the deep trees do not adversely affect
performance. However, if
collective latency is a concern then finding the optimal balance
between decreased parallelism and tree depth is key. On the Niagara2 trying to force a radix-2 tree has a penalty
of 7% in the loosely synchronized case and 16% in the strictly
synchronized case. Thus we argue that the
synchronization semantics of the collective also determine the optimal
communication topology.
Most of the prior work on collective tuning has been done for distributed
memory platforms. This includes both hand-tuning for a
particular machine[17,4], optimizations for clusters with shared memory
nodes[12] and creating new
algorithms[8,6].
The literature shows that the tuning space is quite large and that automatic
tuning (which includes empirical search) is often
beneficial[16].
In prior work by one of the authors, we presented a novel interface
for UPC collectives on BlueGene/L[15].
In contrast, the work in this paper is focused on collectives within a single
shared memory node, including the highly multi-threaded Niagara2 architecture.
Automatically searching over a set of optimized versions of an algorithm has
become a popular technique used by compiler and library developers for
computational kernels.
That literature is too large to cite here, but includes optimizations of
dense and sparse linear algebra, spectral transforms, and stencil operations
on structured grids. Most of the earlier work on automatic tuning work for
computational kernels was done on single processors, but more recent work
includes multicore systems[11,19,20].
We believe the collective communication problem is at least as important as
these computational kernels, since collective patterns are common in user
applications and they stress the most limited features of current and future
systems.
Given the recent limits to clock speed scaling, future performance increases
will rely primarily on increasing the number of processor cores. As the numbers
of cores grow, communication and memory systems that already limit performance
will be increasingly likely to surface as bottlenecks.
By focusing on global communication operations encapsulated in a collective
communication interface, we measured and tuned some of the most critical
execution patterns for future systems. We showed the interface considerations
were critical, that loosely synchronized operations are up to 4x faster than
strictly synchronized ones for a fixed communication topology. This identifies
a clear performance and productivity trade-off, as the strictly synchronized
operations are less likely to result in surprising behavior, but are
consistently slower. Furthermore, even on relatively small shared memory
systems, the choice of topology (the communication pattern within the
algorithm) is critical to performance, with differences as high as 4x between
the best and worst topology for a given synchronization mode. In general, the
choice of optimal algorithm varies with the system, the size of the data being
communicated, and the synchronization mode. All of this suggests the need for
automatic tuning of multicore collectives on today's multicore SMP
systems. As the communication component of
applications continues to become a more significant part of the
runtime tuning these operations will take center stage to ensure
application scalability to the manycore systems of the future.
We would like to thank the members of the Berkeley UPC and
BeBOP groups for their invaluable advice as well as Intel and Sun for their generous hardware donations. This work was supported by the Director, Office of Science, Office of Advanced
Scientific Computing Research, of the U.S. Department of Energy under Contract
No. DE-AC02-05CH11231. In addition this project was also supported in
part by the Department of Energy under contracts DE-FC02-06ER25753 and
DE-FC02-07ER25799.
- 1
-
Intel Xeon Quad Processor.
https://www.intel.com/products/processor/xeon5000.
- 2
-
Sun Fire X4600 M2 Server Information.
https://www.sun.com/servers/x64/x4600/.
- 3
-
Sun UltraSparc T2 Processor Information.
https://www.sun.com/processors/UltraSPARC-T2/.
- 4
-
ALM´ASI, G., HEIDELBERGER, P., ARCHER, C. J., MARTORELL, X., ERWAY,
C. C., MOREIRA, J. E., STEINMACHER-BUROW, B., AND ZHENG, Y.
Optimization of mpi collective communication on BlueGene/L systems.
In ICS '05: Proceedings of the 19th annual international
conference on Supercomputing (New York, NY, USA, 2005), ACM Press,
pp. 253-262.
- 5
-
ASANOVIC, K., BODIK, R., CATANZARO, B. C., GEBIS, J. J., HUSBANDS, P.,
KEUTZER, K., PATTERSON, D. A., PLISHKER, W. L., SHALF, J., WILLIAMS, S. W.,
AND YELICK, K. A.
The landscape of parallel computing research: A view from berkeley.
Tech. Rep. UCB/EECS-2006-183, EECS Department, University of
California, Berkeley, Dec 2006.
- 6
-
BALAJI, P., BUNTINAS, D., BALAY, S., SMITH, B., THAKUR, R., AND GROPP, W.
Nonuniformly communicating noncontiguous data: A case study with
petsc and mpi.
In IEEE Parallel and Distributed Processing Symposium (IPDPS)
(2006).
- 7
-
BELL, C., BONACHEA, D., NISHTALA, R., AND YELICK, K.
Optimizing bandwidth limited problems using one-sided communication
and overlap.
In The 20th Int'l Parallel and Distributed Processing Symposium
(IPDPS) (2006).
- 8
-
BRUCK, J., HO, C.-T., UPFAL, E., KIPNIS, S., AND WEATHERSBY, D.
Efficient algorithms for all-to-all communications in multiport
message-passing systems.
IEEE Trans. Parallel Distrib. Syst. 8, 11 (1997), 1143-1156.
- 9
-
COARFA, C., DOTSENKO, Y., ECKHARDT, J., AND MELLOR-CRUMMEY, J.
Co-array Fortran performance and potential: An NPB experimental
study.
In 16th Int'l Workshop on Languages and Compilers for Parallel
Processing (LCPC) (October 2003).
- 10
-
CULLER, D. E., KARP, R. M., PATTERSON, D. A., SAHAY, A., SCHAUSER, K. E.,
SANTOS, E., SUBRAMONIAN, R., AND VON EICKEN, T.
LogP: Towards a realistic model of parallel computation.
In Proc. 4th ACM SIGPLAN Symposium on Principles and Practice of
Parallel Programming (1993), pp. 1-12.
- 11
-
DATTA, K., MURPHY, M., VOLKOV, V., WILLIAMS, S., CARTER, J., OLIKER, L.,
PATTERSON, D., SHALF, J., AND YELICK, K.
Stencil Computation Optimization and Auto-tuning on State-of-the-Art
Multicore Architectures.
In Supercomputing 2008 (SC08) (November 2008).
- 12
-
MAMIDALA, A., KUMAR, R., DE, D., AND PANDA, D. K.
Mpi collectives on modern multicore clusters: Performance
optimizations and communication characteristics.
Int'l Symposium on Cluster Computing and the Grid, Lyon,
France (May 2008).
- 13
-
MELLOR-CRUMMEY, J. M., AND SCOTT, M. L.
Algorithms for scalable synchronization on shared-memory
multiprocessors.
ACM Trans. Comput. Syst. 9, 1 (1991), 21-65.
- 14
-
MPI: A message-passing interface standard, v1.1.
Technical report, University of Tennessee, Knoxville, June 12, 1995.
- 15
-
NISHTALA, R., ALMASI, G., AND CASCAVAL, C.
Performance without pain = productivity: Data layout and collective
communication in upc.
In Principles and Practices of Parallel Programming (PPoPP)
(2008).
- 16
-
PJEŠSIVAC-GRBOVI´C, J.
Towards Automatic and Adaptive Optimizations of MPI Collective
Operations.
PhD thesis, University of Tennessee, Knoxville, December 2007.
- 17
-
QIAN, Y., AND AFSAHI, A.
Efficient rdma-based multi-port collectives on multi-rail qsnetii
clusters.
In The 6th Workshop on Communication Architecture for Clusters
(CAC 2006), In Proceedings of the 20th International Parallel and Distributed
Processing Symposium (IPDPS 2006) (2006).
- 18
-
UPC language specifications, v1.2.
Tech. Rep. LBNL-59208, Berkeley National Lab, 2005.
- 19
-
WILLIAMS, S., CARTER, J., OLIKER, L., SHALF, J., AND YELICK, K.
Lattice Boltzmann simulation optimization on leading multicore
platforms.
In Interational Conference on Parallel and Distributed Computing
Systems (IPDPS) (2008).
- 20
-
WILLIAMS, S., OLIKER, L., VUDUC, R., SHALF, J., YELICK, K., AND DEMMEL,
J.
Optimization of sparse matrix-vector multiplication on emerging
multicore platforms.
In Proceedings of Supercomputing 2007 (2007).
- 21
-
YELICK, K., SEMENZATO, L., PIKE, G., MIYAMOTO, C., LIBLIT, B.,
KRISHNAMURTHY, A., HILFINGER, P., GRAHAM, S., GAY, D., COLELLA, P., AND
AIKEN, A.
Titanium: a high performance java dialect.
In Proc. of ACM 1998 Workshop on Java for High-Performance
Network Computing (February 1998).
Optimizing Collective Communication on Multicores
This document was generated using the
LaTeX2HTML translator Version 2002-2-1 (1.71)
Copyright © 1993, 1994, 1995, 1996,
Nikos Drakos,
Computer Based Learning Unit, University of Leeds.
Copyright © 1997, 1998, 1999,
Ross Moore,
Mathematics Department, Macquarie University, Sydney.
The command line arguments were:
latex2html -split 0 -show_section_numbers -local_icons -no_navigation main.tex
The translation was initiated by Rajesh Nishtala on 2009-03-03
Footnotes
- ...
used1
- A radix ``1'' k-nomial tree is a chain tree.
- ... contexts2
- The comparison of performance
of the various approaches within a machine is more valid than
comparison across machines due to the wide variation in the amount of
available hardware threads.
- ...sec:coll-tune3
- We perform an exhaustive search over the tree topologies
and report the best one.
Rajesh Nishtala
2009-03-03